
一种助力机械臂.pdf

猫巷****志敏


1/6

2/6

3/6
4/6

5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种助力机械臂.pdf
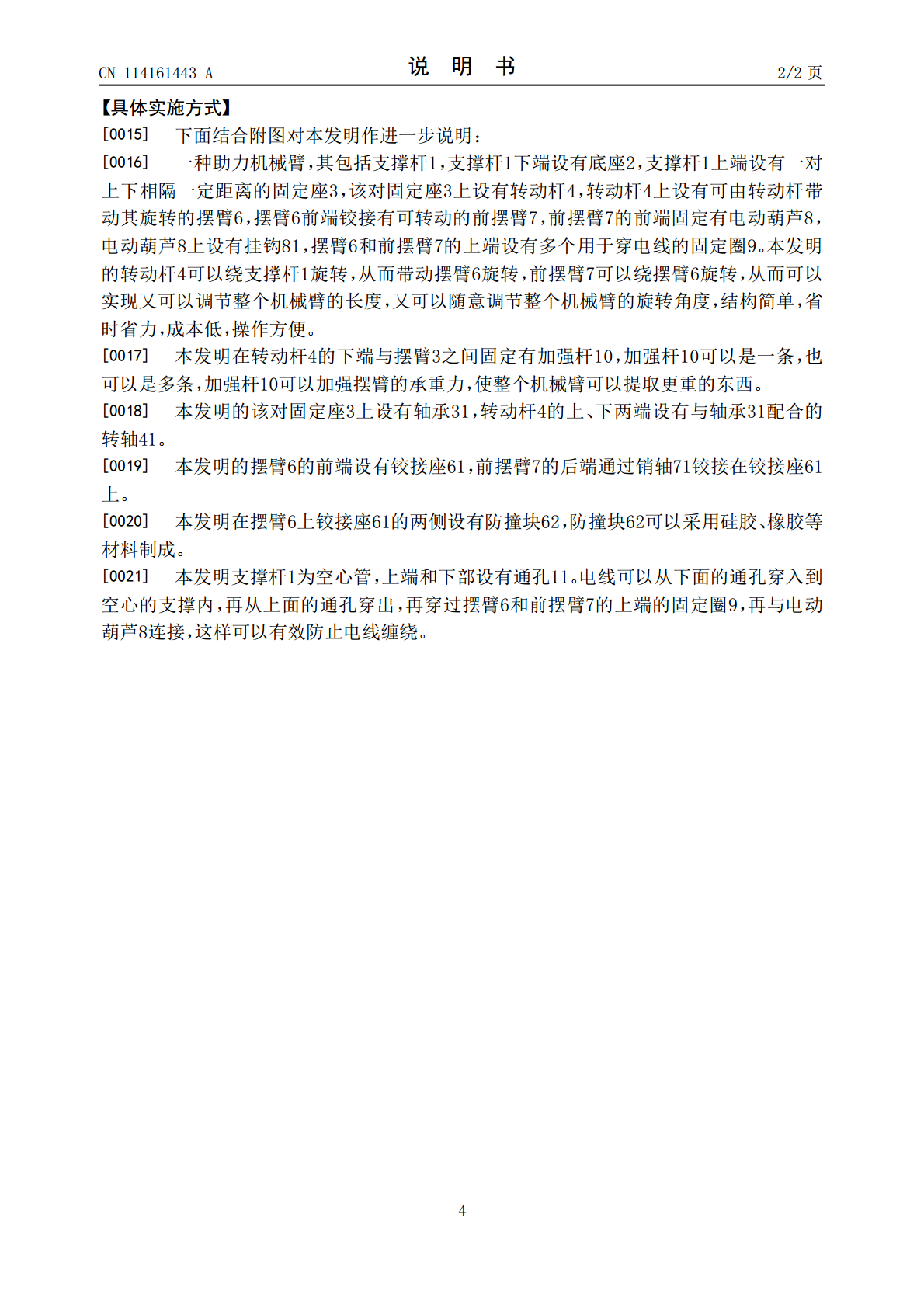
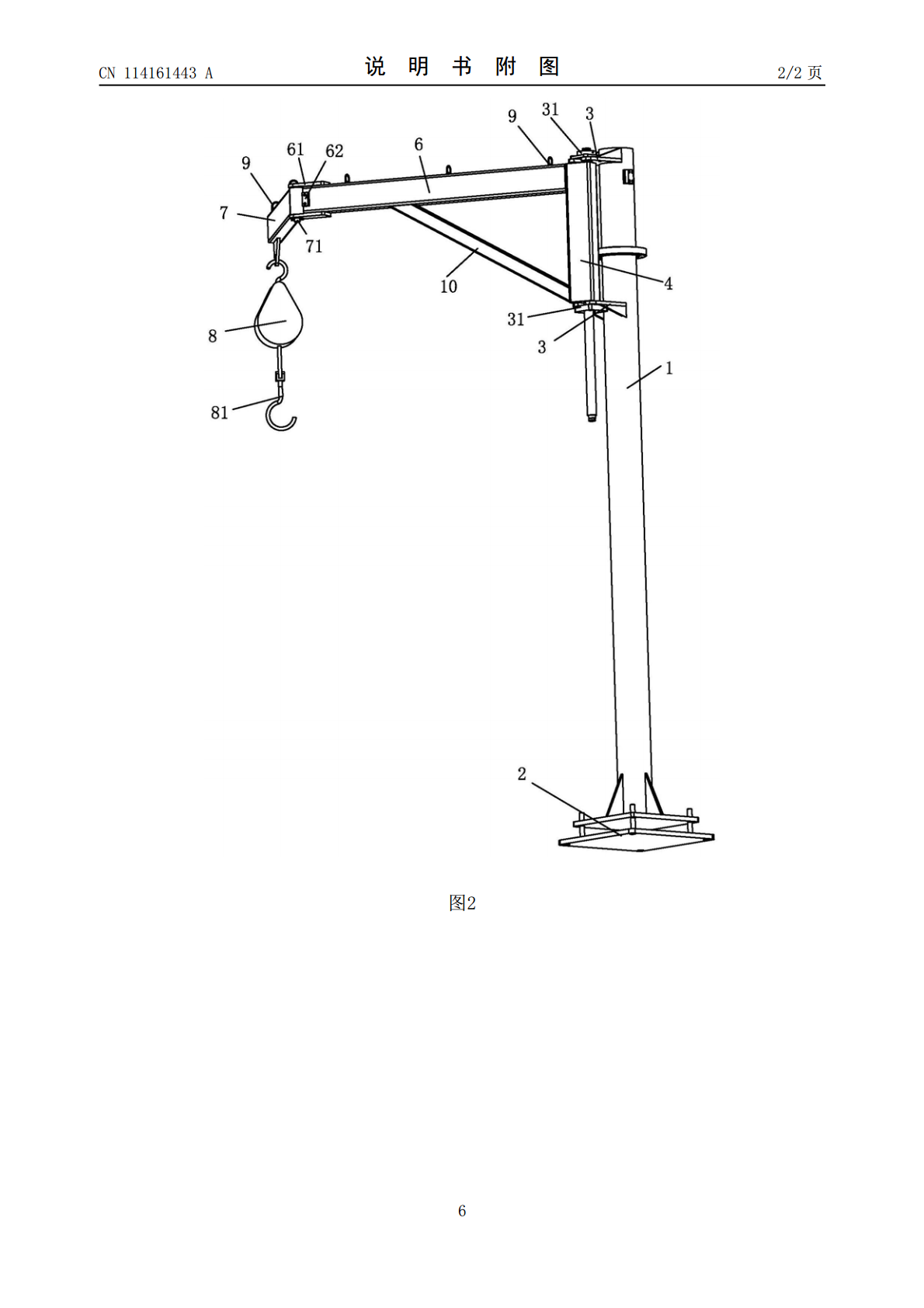
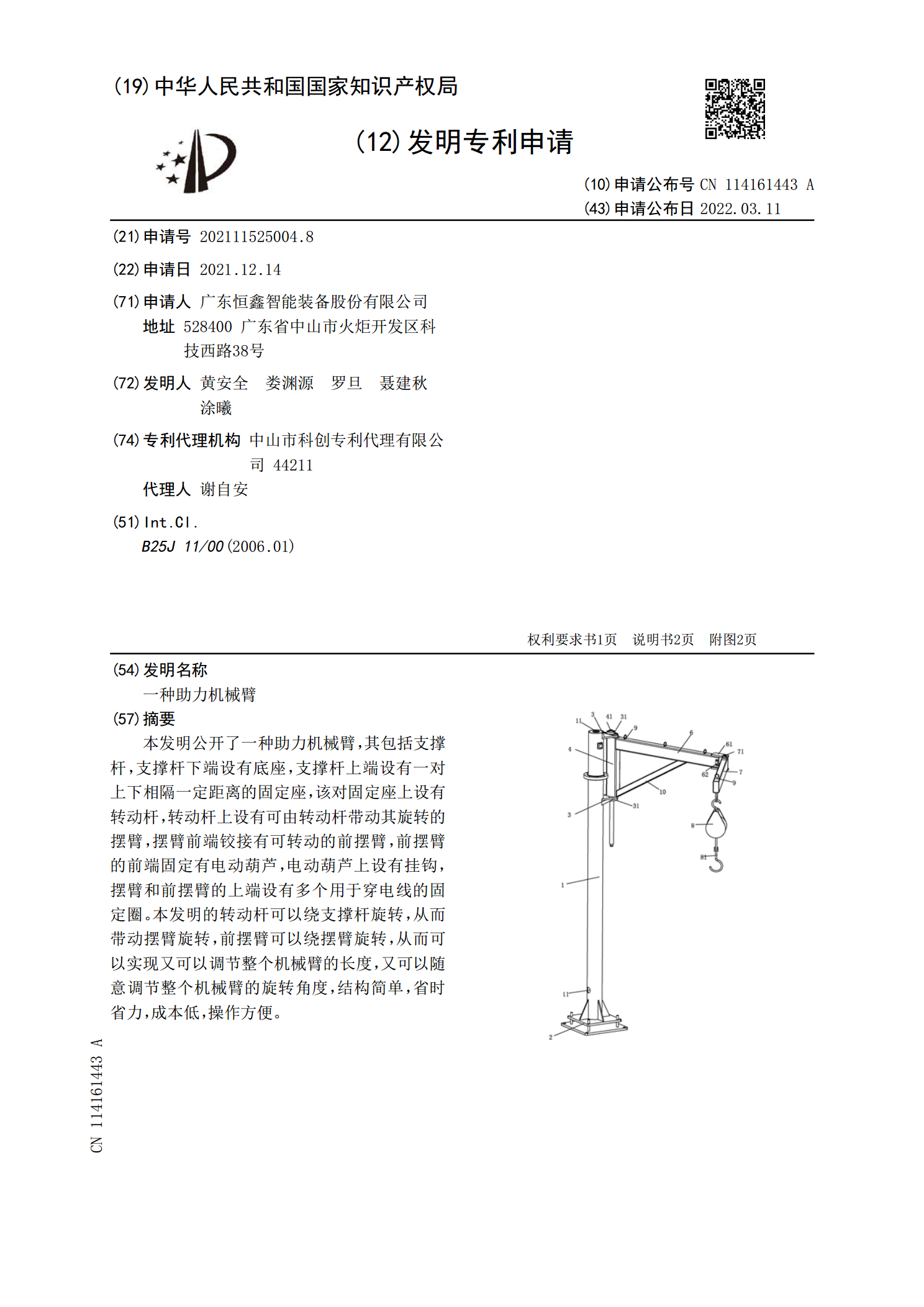
本发明公开了一种助力机械臂,其包括支撑杆,支撑杆下端设有底座,支撑杆上端设有一对上下相隔一定距离的固定座,该对固定座上设有转动杆,转动杆上设有可由转动杆带动其旋转的摆臂,摆臂前端铰接有可转动的前摆臂,前摆臂的前端固定有电动葫芦,电动葫芦上设有挂钩,摆臂和前摆臂的上端设有多个用于穿电线的固定圈。本发明的转动杆可以绕支撑杆旋转,从而带动摆臂旋转,前摆臂可以绕摆臂旋转,从而可以实现又可以调节整个机械臂的长度,又可以随意调节整个机械臂的旋转角度,结构简单,省时省力,成本低,操作方便。

一种助力托举机械臂装置.pdf
本发明涉及一种助力托举机械臂装置,包括:腰卡组件,用于装配在使用人员的腰间的背部位置;支臂组件,连接在所述腰卡组件上,其末端向侧部延伸并能在水平方向上弯折;支撑杆组件,包括其底端铰接在所述支臂组件的末端的调节杆以及连接在所述支臂组件的末端与所述调节杆的上部之间的且能使所述调节杆相对所述支臂组件保持在相应角度状态的辅助连接件;托架组件,连接在所述调节杆的顶端,用于放置待支撑物件。该助力托举机械臂装置能够方便地供使用人员佩戴在腰间背部位置,其体积小巧,方便携带,满足了使用人员各种射击训练的需求,不受场地等因素

一种纯气动助力机械臂装置.pdf
本发明公开了一种纯气动助力机械臂装置,解决了现有技术中加油机制造过程中自吸式齿轮油泵移动和翻转效率低下、工人劳动强度高、安全系数低的技术问题。本发明包括通用机械臂、控制单元和翻转机构,所述翻转机构包括与通用机械臂相连的夹具支架、气动夹具、气动驱动机构,气动驱动机构包括与夹具支架连接的翻转气缸,翻转气缸的铰接有翻转连杆,夹具支架的端部固定连接有翻转轴座,翻转轴座内设置有与翻转连杆相连的传动齿轮,翻转轴座下方设置有与传动齿轮传动连接的翻转转轴,翻转转轴上设置所述气动夹具,翻转轴座上设置有限位结构。本发明具有结

一种用于采摘水果助力机械臂.pdf
本发明公开了一种用于采摘水果助力机械臂,包括中空结构的工作台,所述工作台的底部四角均设有液压油缸,且液压油缸的一侧外壁上转动连接有万向轮,且液压油缸远离万向轮的一侧外壁上设有固定块,固定块为L形结构,且固定块与万向轮之间连接有弹簧,所述液压油缸内安装有液压油缸,且液压油缸的活塞杆上套接有位于液压油缸下方的橡胶块,且橡胶块的直径小于液压油缸的内径,橡胶块为半球状结构,且橡胶块的顶部设有一圈卡勾。本发明能够在工作状态和移动状态之间进行转变,工作状态下装置的高度可提升或降低方便多多角度的水果进行采摘,移动状态时

齿轮搬运检测助力机械臂.pdf
本发明公开了齿轮搬运检测助力机械臂,包括架板及连接于架板上的手扶把手、翻转组件和夹持组件;翻转组件包括翻转轴及与翻转轴配合用于驱动翻转轴转动的翻转驱动组件;夹持组件包括夹具及与夹具配合用于驱动夹具夹紧或松开的夹持驱动组件;夹持组件与翻转轴连接,并跟随翻转轴转动。本发明的有益效果是:通过夹持驱动组件实现对夹具的夹紧或松开驱动,实现对齿轮的夹持,实现齿轮的机械搬运,降低了劳动强度;通过将翻转轴与夹持组件连接后再通过翻转驱动组件驱动翻转轴转动,实现对夹持后齿轮的翻转,便于对齿轮的齿轮端进行检测,无需人工进行翻转