
一种可越障的爬壁机器人及其越障方法.pdf

俊凤****bb

1/10
2/10
3/10
4/10
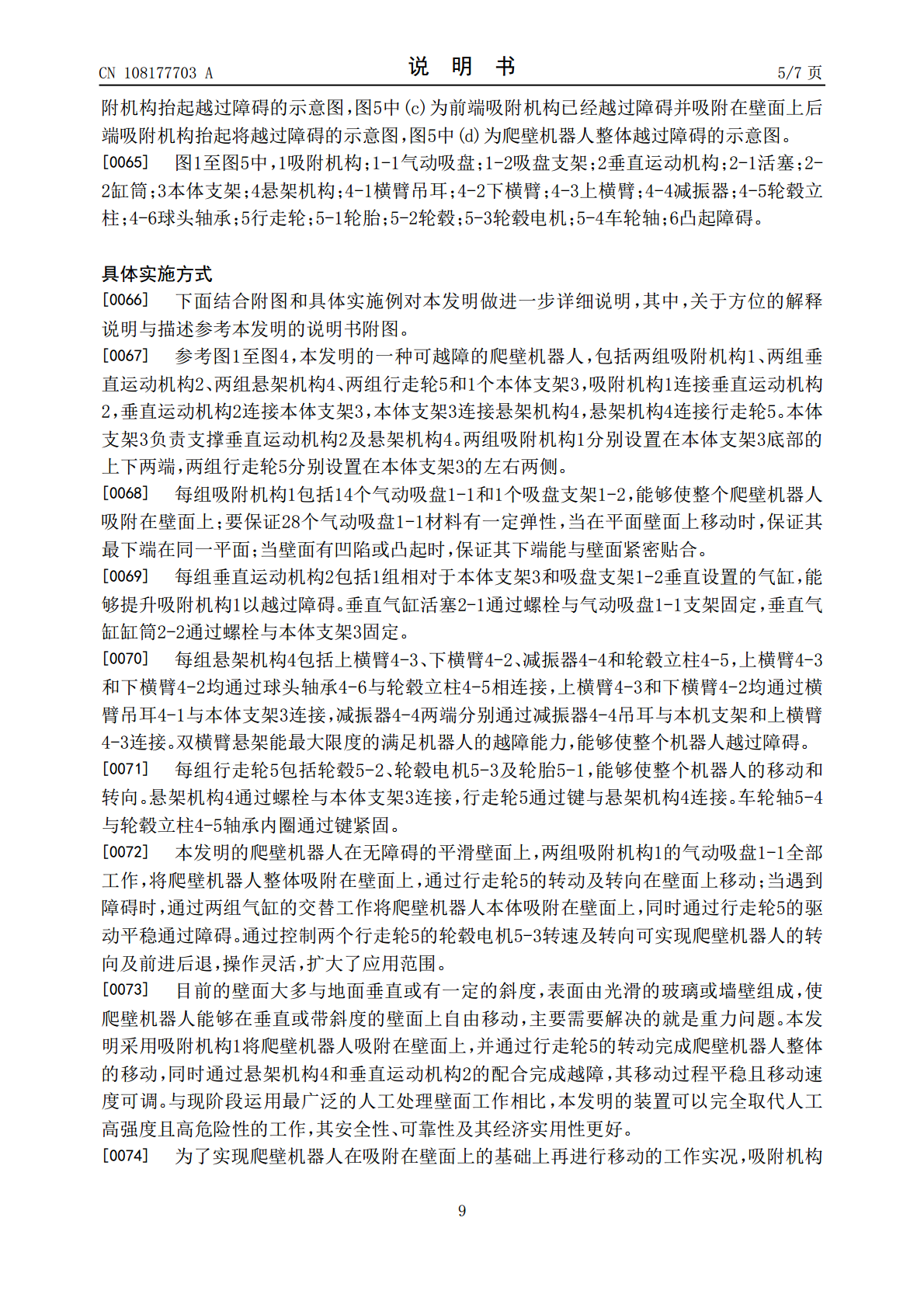
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种可越障的爬壁机器人及其越障方法.pdf
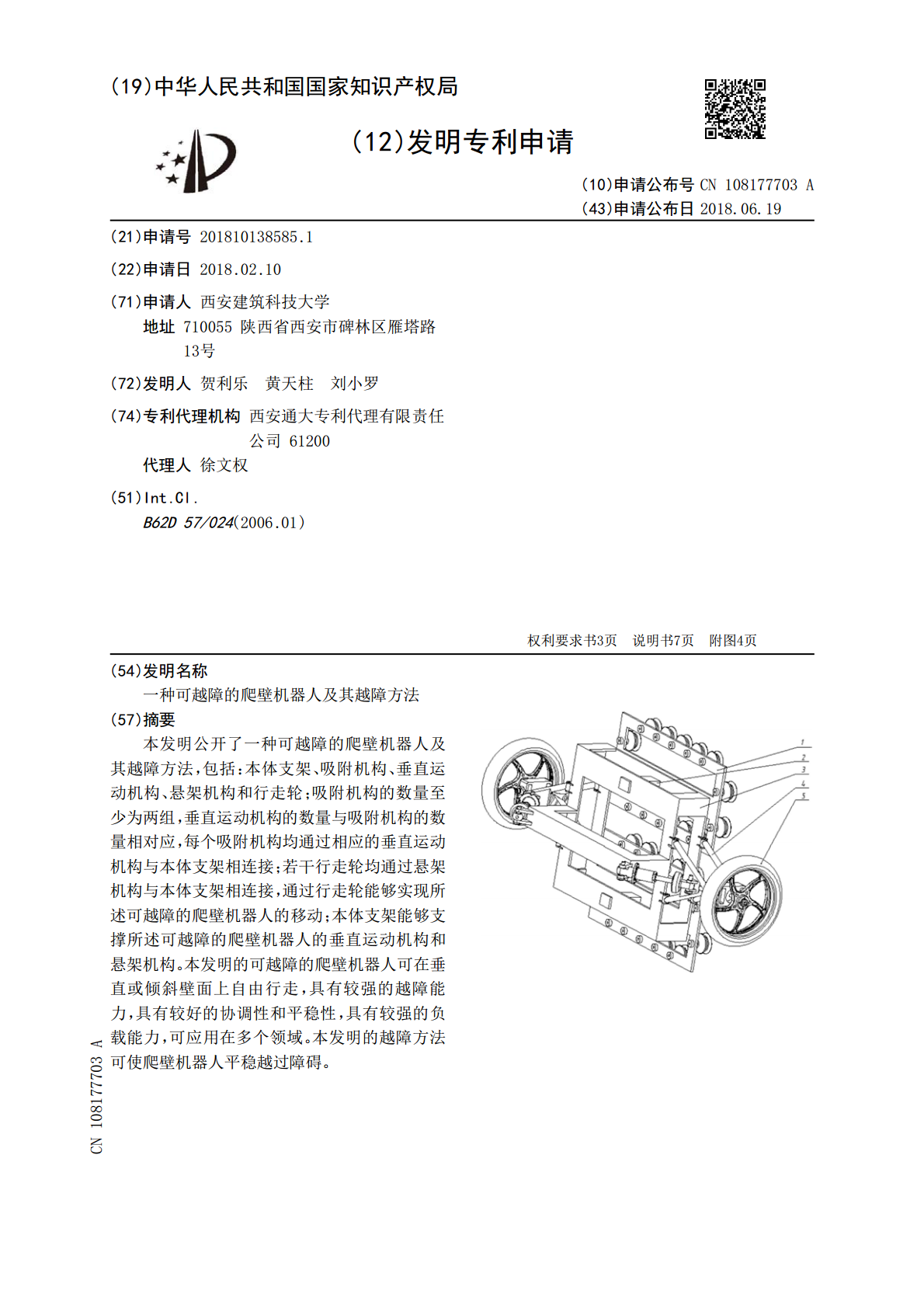
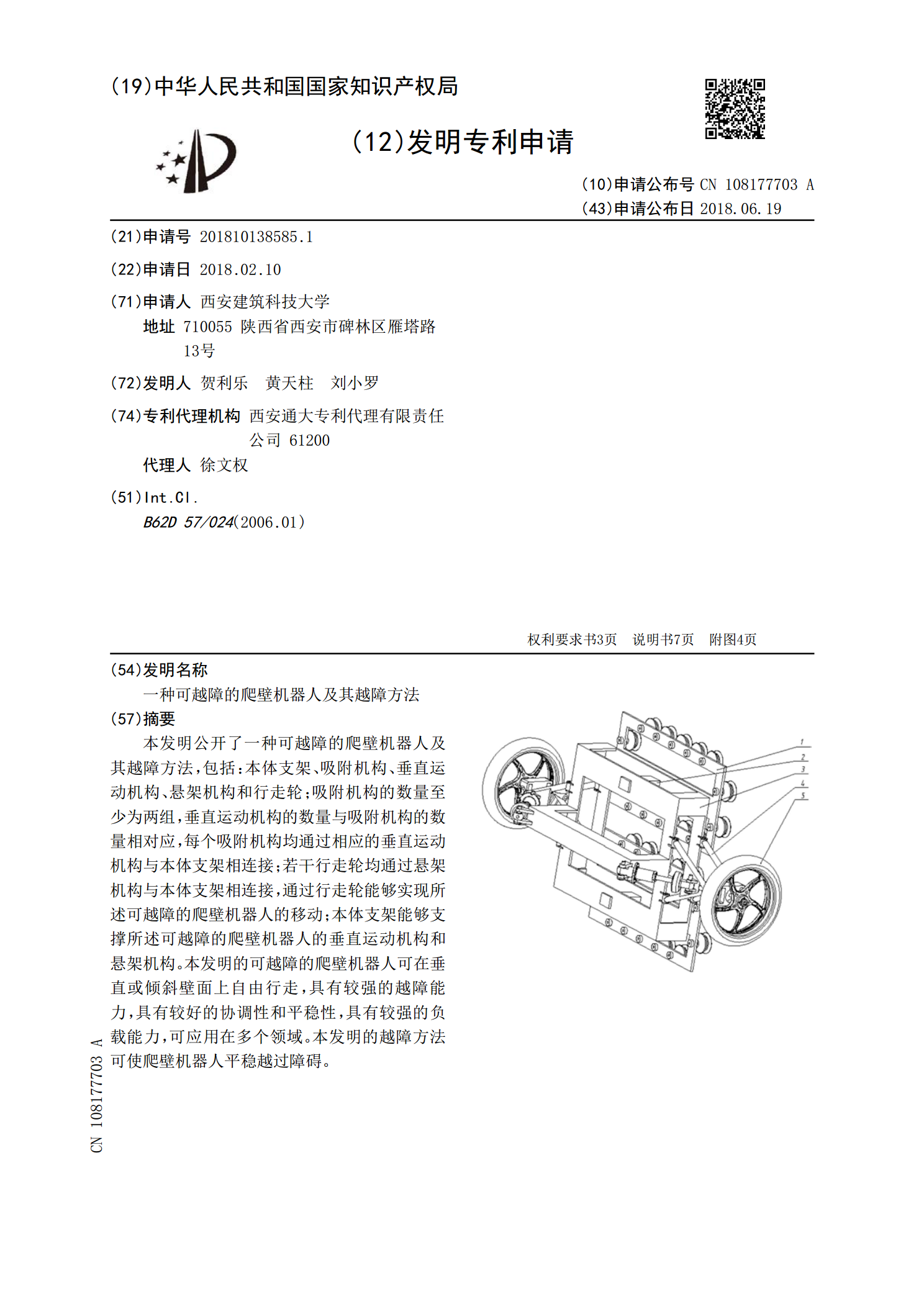
本发明公开了一种可越障的爬壁机器人及其越障方法,包括:本体支架、吸附机构、垂直运动机构、悬架机构和行走轮;吸附机构的数量至少为两组,垂直运动机构的数量与吸附机构的数量相对应,每个吸附机构均通过相应的垂直运动机构与本体支架相连接;若干行走轮均通过悬架机构与本体支架相连接,通过行走轮能够实现所述可越障的爬壁机器人的移动;本体支架能够支撑所述可越障的爬壁机器人的垂直运动机构和悬架机构。本发明的可越障的爬壁机器人可在垂直或倾斜壁面上自由行走,具有较强的越障能力,具有较好的协调性和平稳性,具有较强的负载能力,可应用
一种轮足转换式可越障爬壁机器人及其越障方法.pdf
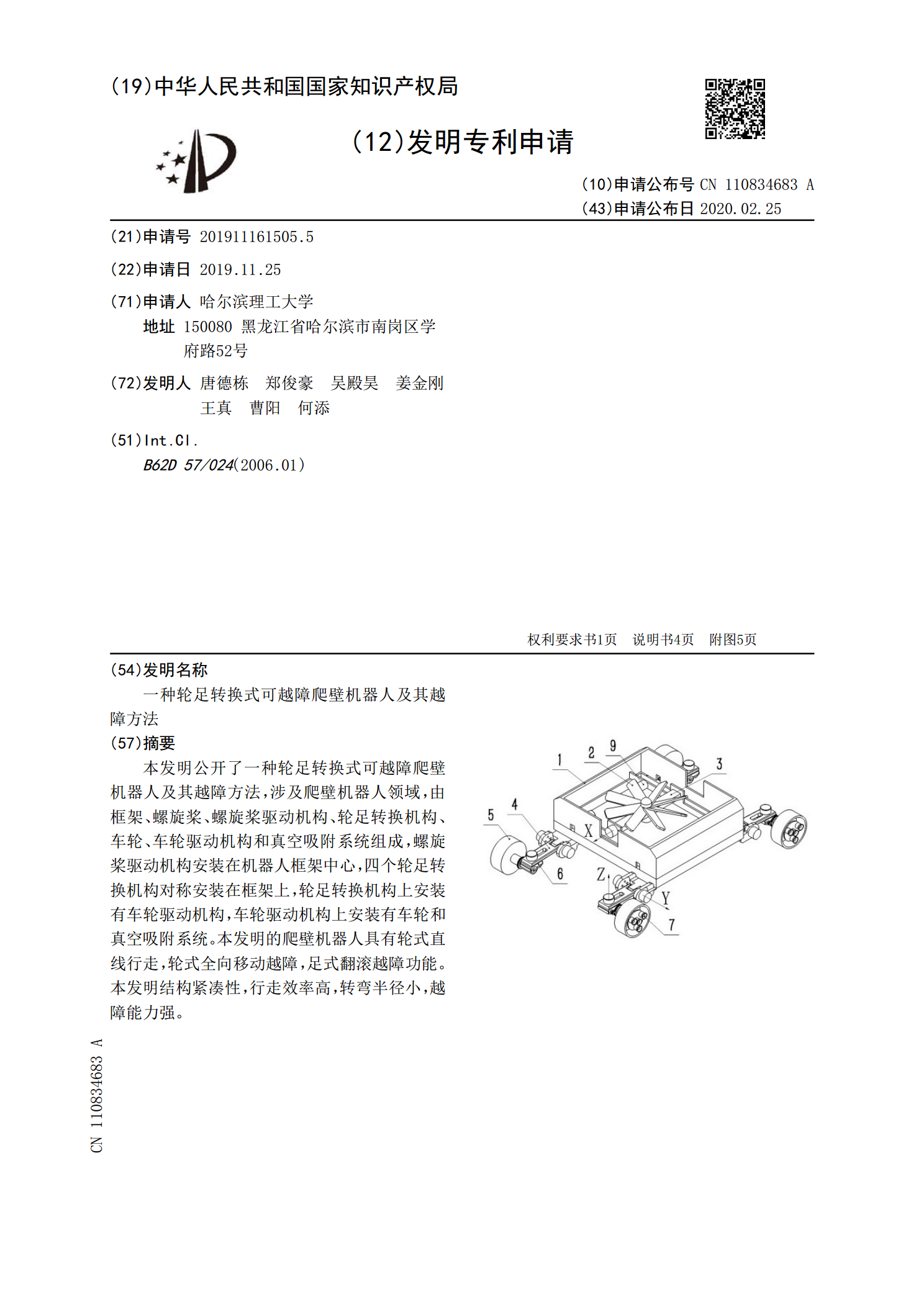
本发明公开了一种轮足转换式可越障爬壁机器人及其越障方法,涉及爬壁机器人领域,由框架、螺旋桨、螺旋桨驱动机构、轮足转换机构、车轮、车轮驱动机构和真空吸附系统组成,螺旋桨驱动机构安装在机器人框架中心,四个轮足转换机构对称安装在框架上,轮足转换机构上安装有车轮驱动机构,车轮驱动机构上安装有车轮和真空吸附系统。本发明的爬壁机器人具有轮式直线行走,轮式全向移动越障,足式翻滚越障功能。本发明结构紧凑性,行走效率高,转弯半径小,越障能力强。
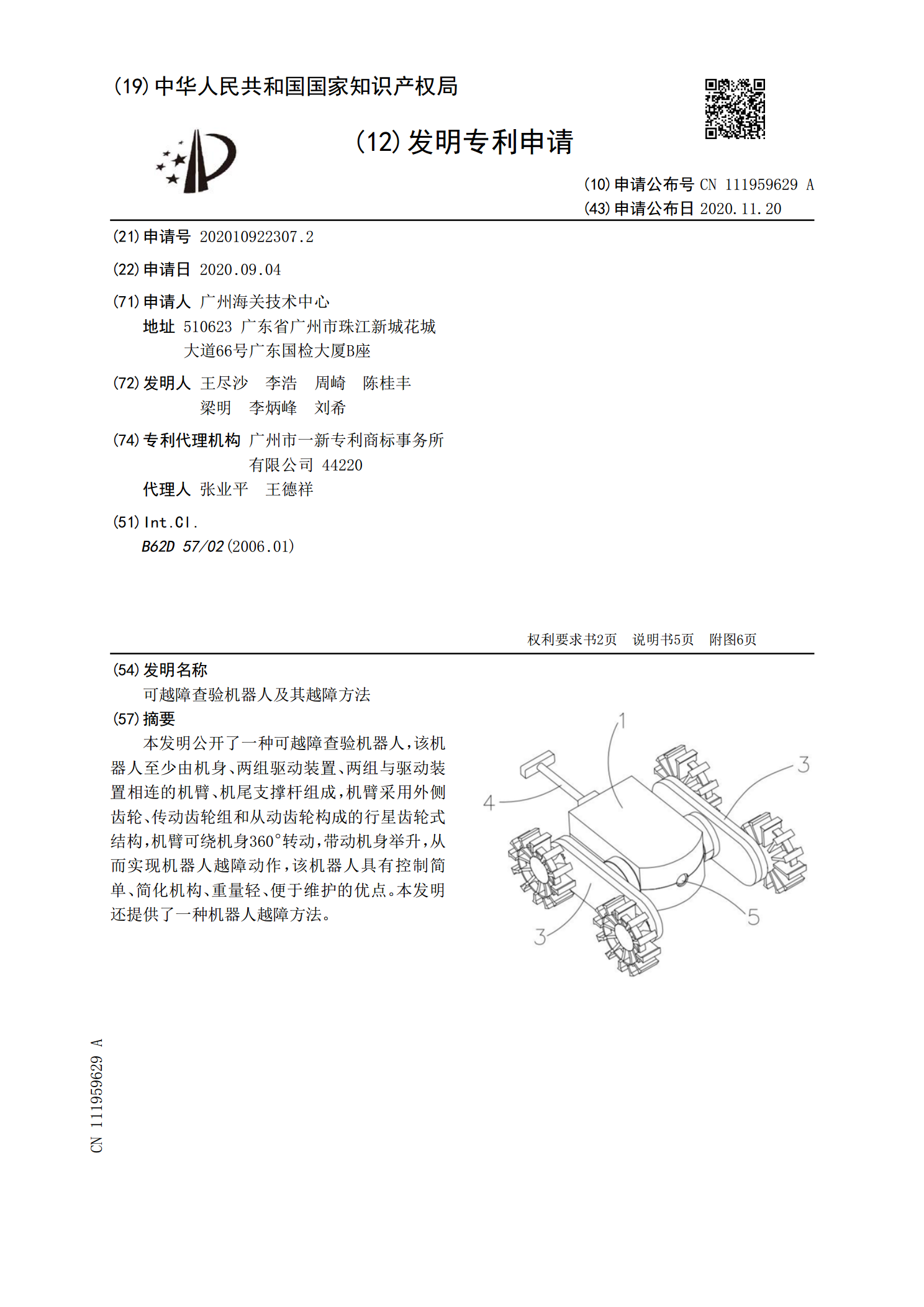
可越障查验机器人及其越障方法.pdf
本发明公开了一种可越障查验机器人,该机器人至少由机身、两组驱动装置、两组与驱动装置相连的机臂、机尾支撑杆组成,机臂采用外侧齿轮、传动齿轮组和从动齿轮构成的行星齿轮式结构,机臂可绕机身360°转动,带动机身举升,从而实现机器人越障动作,该机器人具有控制简单、简化机构、重量轻、便于维护的优点。本发明还提供了一种机器人越障方法。
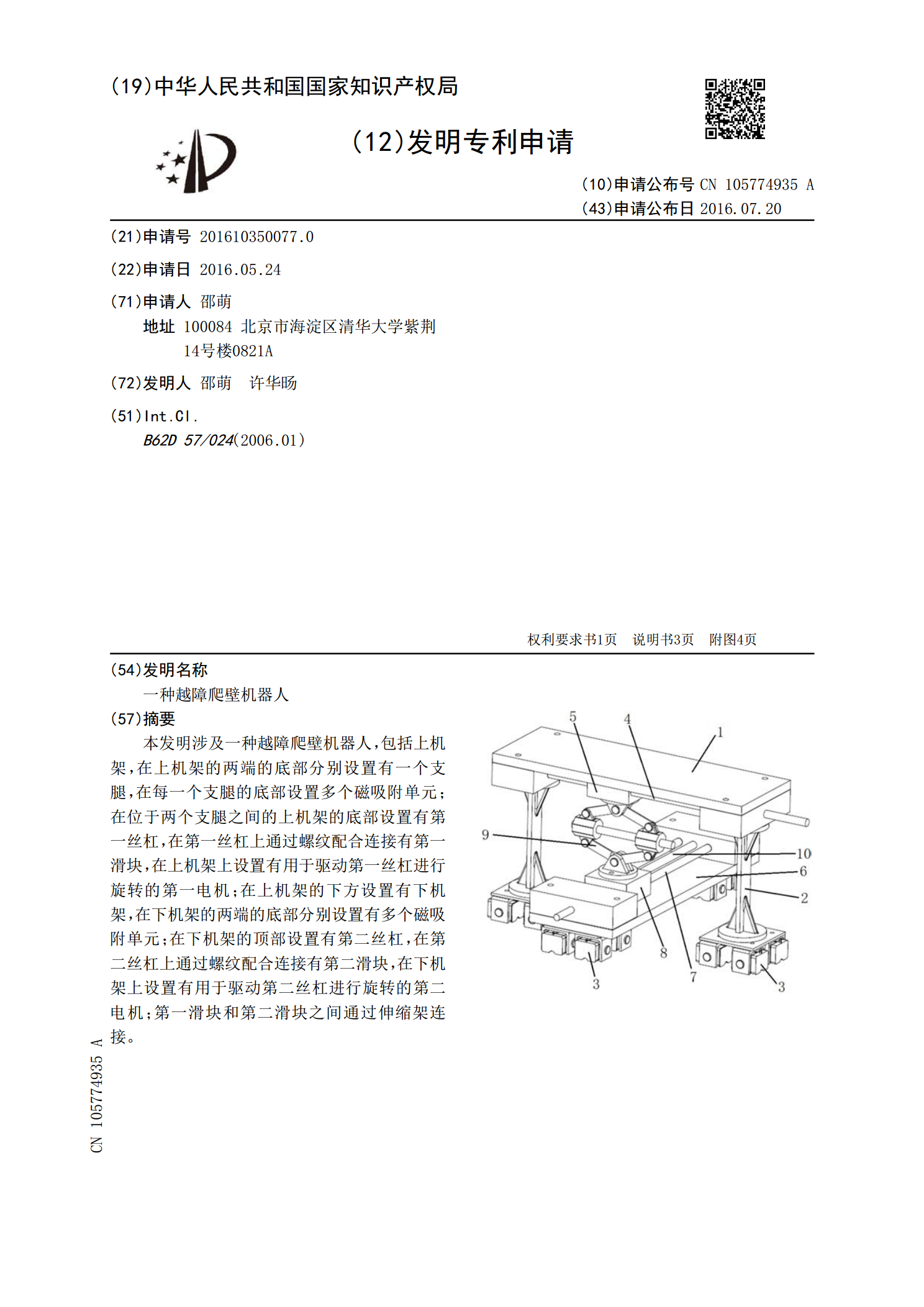
一种越障爬壁机器人.pdf
本发明涉及一种越障爬壁机器人,包括上机架,在上机架的两端的底部分别设置有一个支腿,在每一个支腿的底部设置多个磁吸附单元;在位于两个支腿之间的上机架的底部设置有第一丝杠,在第一丝杠上通过螺纹配合连接有第一滑块,在上机架上设置有用于驱动第一丝杠进行旋转的第一电机;在上机架的下方设置有下机架,在下机架的两端的底部分别设置有多个磁吸附单元;在下机架的顶部设置有第二丝杠,在第二丝杠上通过螺纹配合连接有第二滑块,在下机架上设置有用于驱动第二丝杠进行旋转的第二电机;第一滑块和第二滑块之间通过伸缩架连接。
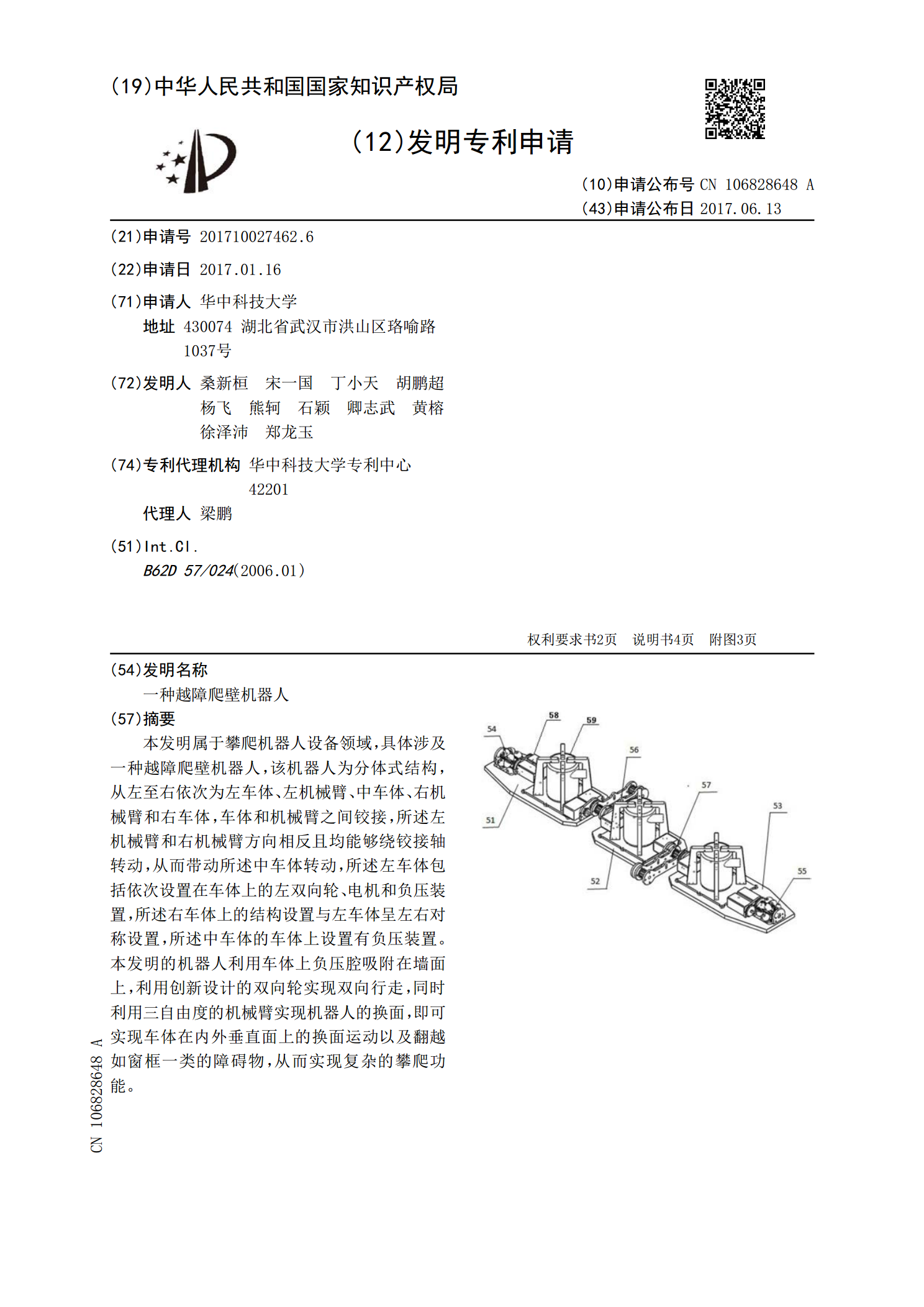
一种越障爬壁机器人.pdf
本发明属于攀爬机器人设备领域,具体涉及一种越障爬壁机器人,该机器人为分体式结构,从左至右依次为左车体、左机械臂、中车体、右机械臂和右车体,车体和机械臂之间铰接,所述左机械臂和右机械臂方向相反且均能够绕铰接轴转动,从而带动所述中车体转动,所述左车体包括依次设置在车体上的左双向轮、电机和负压装置,所述右车体上的结构设置与左车体呈左右对称设置,所述中车体的车体上设置有负压装置。本发明的机器人利用车体上负压腔吸附在墙面上,利用创新设计的双向轮实现双向行走,同时利用三自由度的机械臂实现机器人的换面,即可实现车体在内