
一种六轴线激光齿轮测量装置.pdf

慧娇****文章

1/10
2/10
3/10

4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
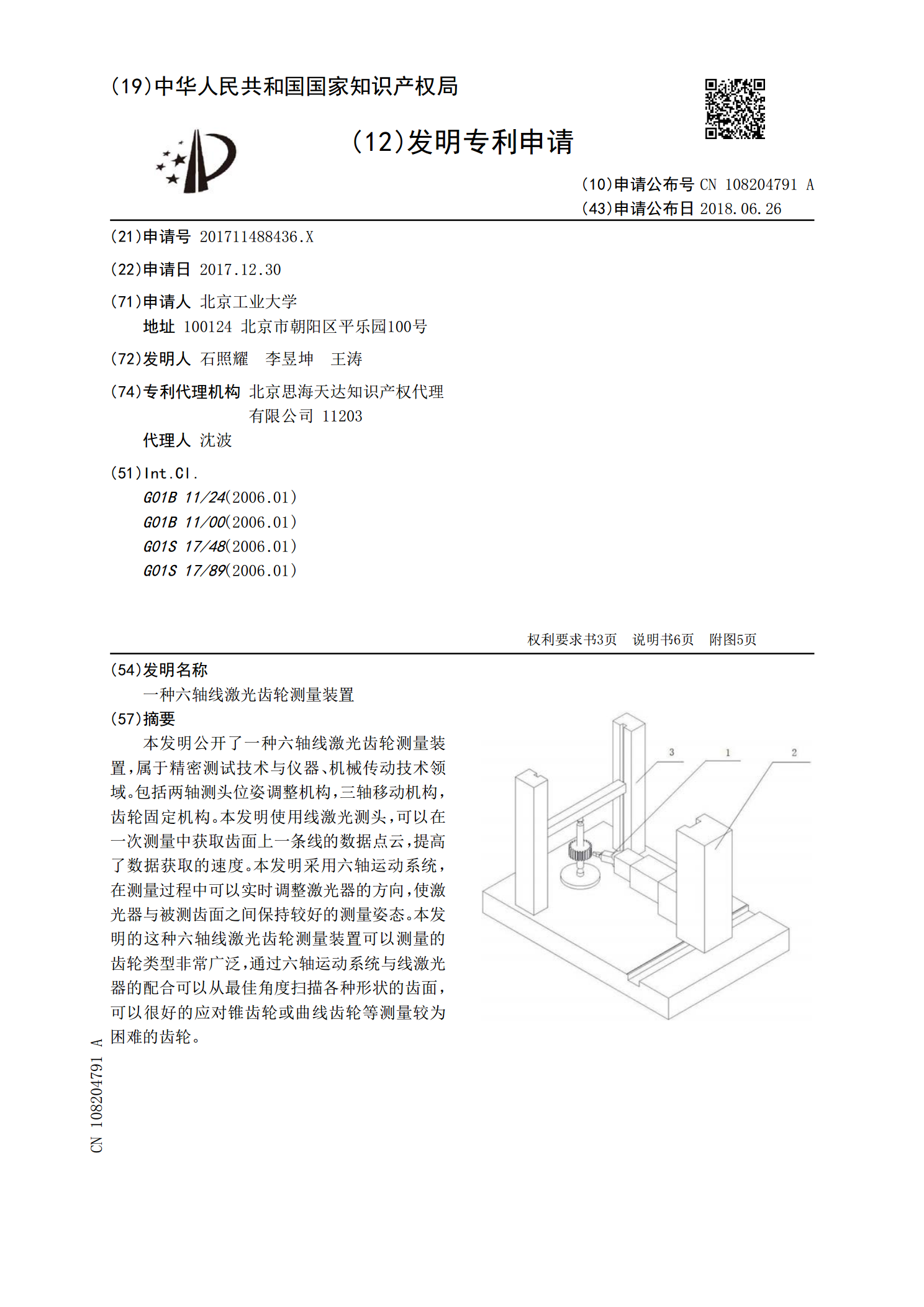
一种六轴线激光齿轮测量装置.pdf
本发明公开了一种六轴线激光齿轮测量装置,属于精密测试技术与仪器、机械传动技术领域。包括两轴测头位姿调整机构,三轴移动机构,齿轮固定机构。本发明使用线激光测头,可以在一次测量中获取齿面上一条线的数据点云,提高了数据获取的速度。本发明采用六轴运动系统,在测量过程中可以实时调整激光器的方向,使激光器与被测齿面之间保持较好的测量姿态。本发明的这种六轴线激光齿轮测量装置可以测量的齿轮类型非常广泛,通过六轴运动系统与线激光器的配合可以从最佳角度扫描各种形状的齿面,可以很好的应对锥齿轮或曲线齿轮等测量较为困难的齿轮。
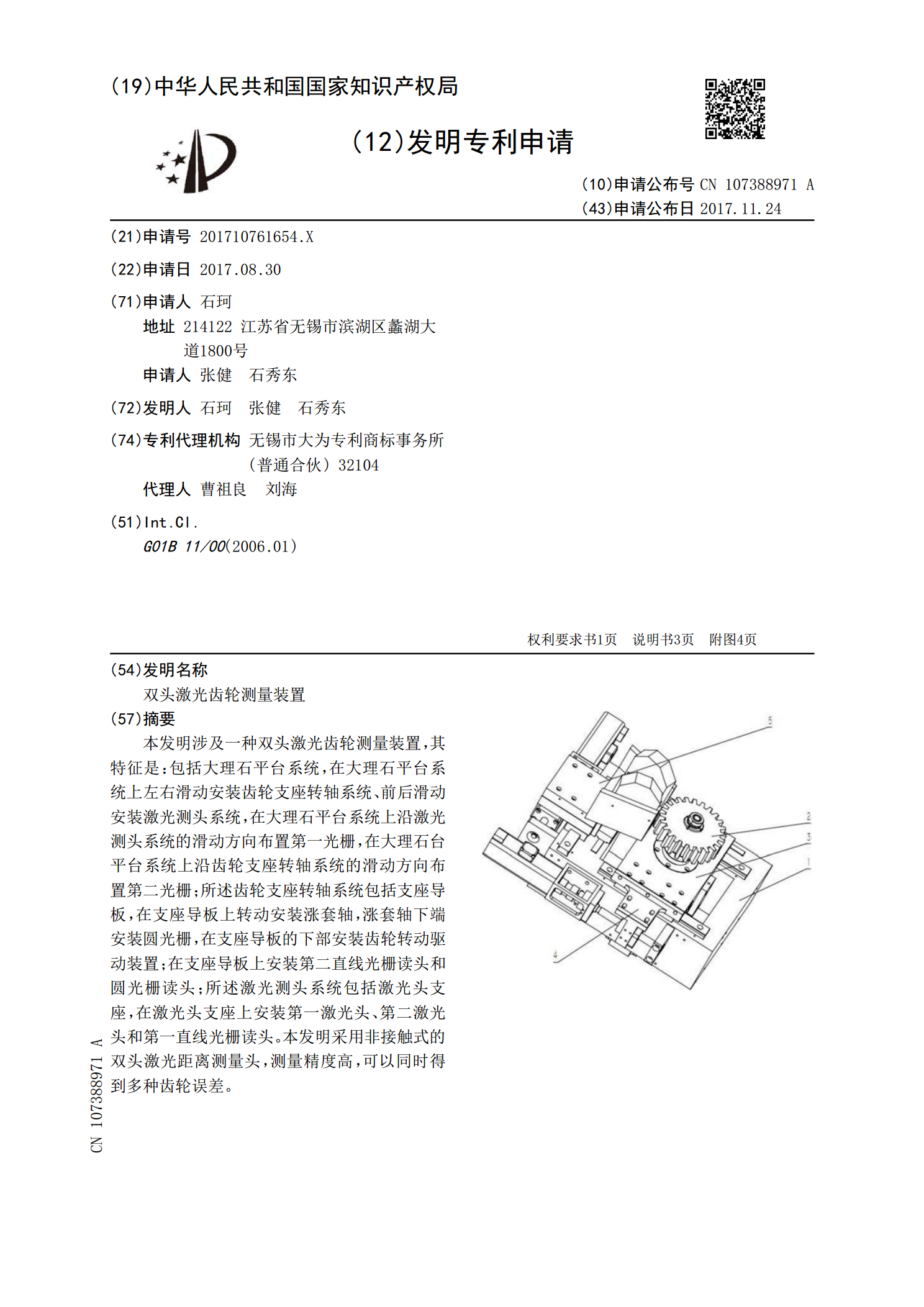
双头激光齿轮测量装置.pdf
本发明涉及一种双头激光齿轮测量装置,其特征是:包括大理石平台系统,在大理石平台系统上左右滑动安装齿轮支座转轴系统、前后滑动安装激光测头系统,在大理石平台系统上沿激光测头系统的滑动方向布置第一光栅,在大理石台平台系统上沿齿轮支座转轴系统的滑动方向布置第二光栅;所述齿轮支座转轴系统包括支座导板,在支座导板上转动安装涨套轴,涨套轴下端安装圆光栅,在支座导板的下部安装齿轮转动驱动装置;在支座导板上安装第二直线光栅读头和圆光栅读头;所述激光测头系统包括激光头支座,在激光头支座上安装第一激光头、第二激光头和第一直线光
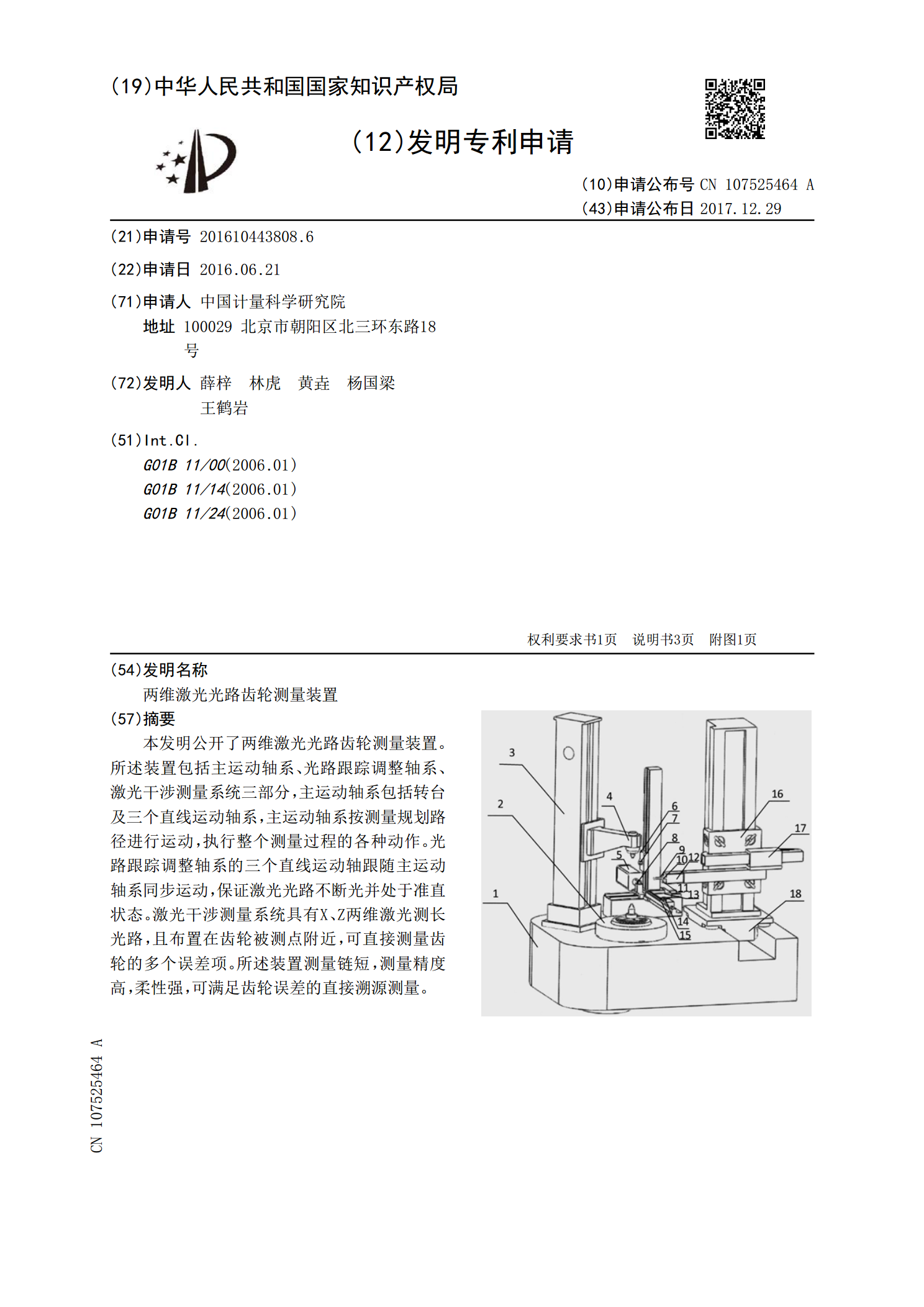
两维激光光路齿轮测量装置.pdf
本发明公开了两维激光光路齿轮测量装置。所述装置包括主运动轴系、光路跟踪调整轴系、激光干涉测量系统三部分,主运动轴系包括转台及三个直线运动轴系,主运动轴系按测量规划路径进行运动,执行整个测量过程的各种动作。光路跟踪调整轴系的三个直线运动轴跟随主运动轴系同步运动,保证激光光路不断光并处于准直状态。激光干涉测量系统具有X、Z两维激光测长光路,且布置在齿轮被测点附近,可直接测量齿轮的多个误差项。所述装置测量链短,测量精度高,柔性强,可满足齿轮误差的直接溯源测量。
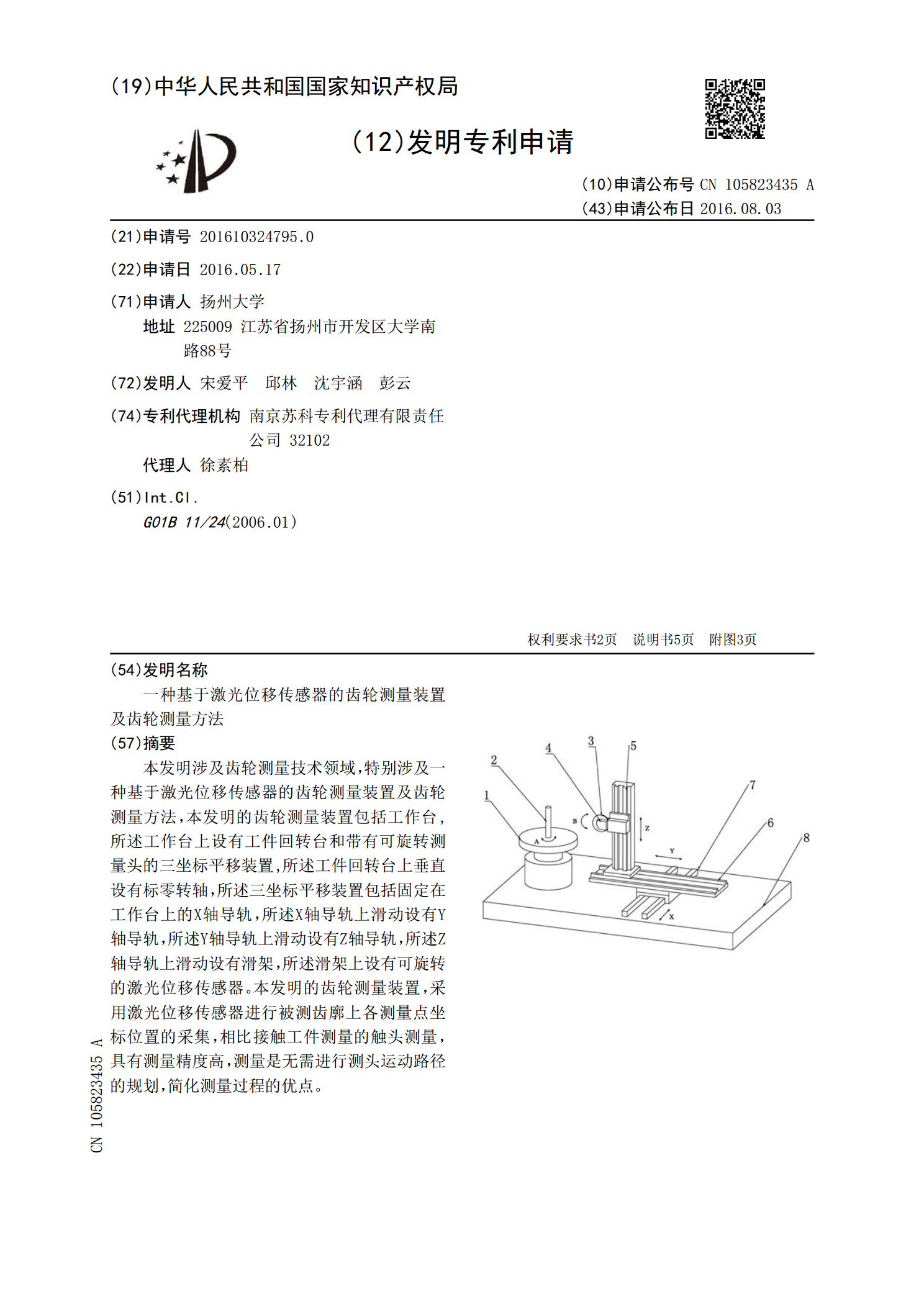
一种基于激光位移传感器的齿轮测量装置及齿轮测量方法.pdf
本发明涉及齿轮测量技术领域,特别涉及一种基于激光位移传感器的齿轮测量装置及齿轮测量方法,本发明的齿轮测量装置包括工作台,所述工作台上设有工件回转台和带有可旋转测量头的三坐标平移装置,所述工件回转台上垂直设有标零转轴,所述三坐标平移装置包括固定在工作台上的X轴导轨,所述X轴导轨上滑动设有Y轴导轨,所述Y轴导轨上滑动设有Z轴导轨,所述Z轴导轨上滑动设有滑架,所述滑架上设有可旋转的激光位移传感器。本发明的齿轮测量装置,采用激光位移传感器进行被测齿廓上各测量点坐标位置的采集,相比接触工件测量的触头测量,具有测量精

齿轮激光测量技术.pptx
齿轮测量—激光测量法内容提要齿轮单项几何形状误差测量技术采用坐标式几何解析测量法,将齿轮作为一个具有复杂形状的几何实体,在所建立的测量坐标系(直角坐标系、极坐标系或圆柱坐标系)上,按照设计几何参数对齿轮齿面的几何形状偏差进行测量。齿轮综合误差测量技术采用啮合滚动式综合测量法,把齿轮作为回转的传动元件,在理论安装中心距下,和测量齿轮啮合滚动,测量其综合偏差。齿轮整体误差测量技术1、用坐标式几何解析法对单项几何精度测量,并按齿轮啮合传动顺序和位置,集成为静态齿轮整体误差曲线;2、按单面啮合综合测量方式,使用特