
一种基于激光位移传感器的齿轮测量装置及齿轮测量方法.pdf

是你****盟主

1/10

2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于激光位移传感器的齿轮测量装置及齿轮测量方法.pdf
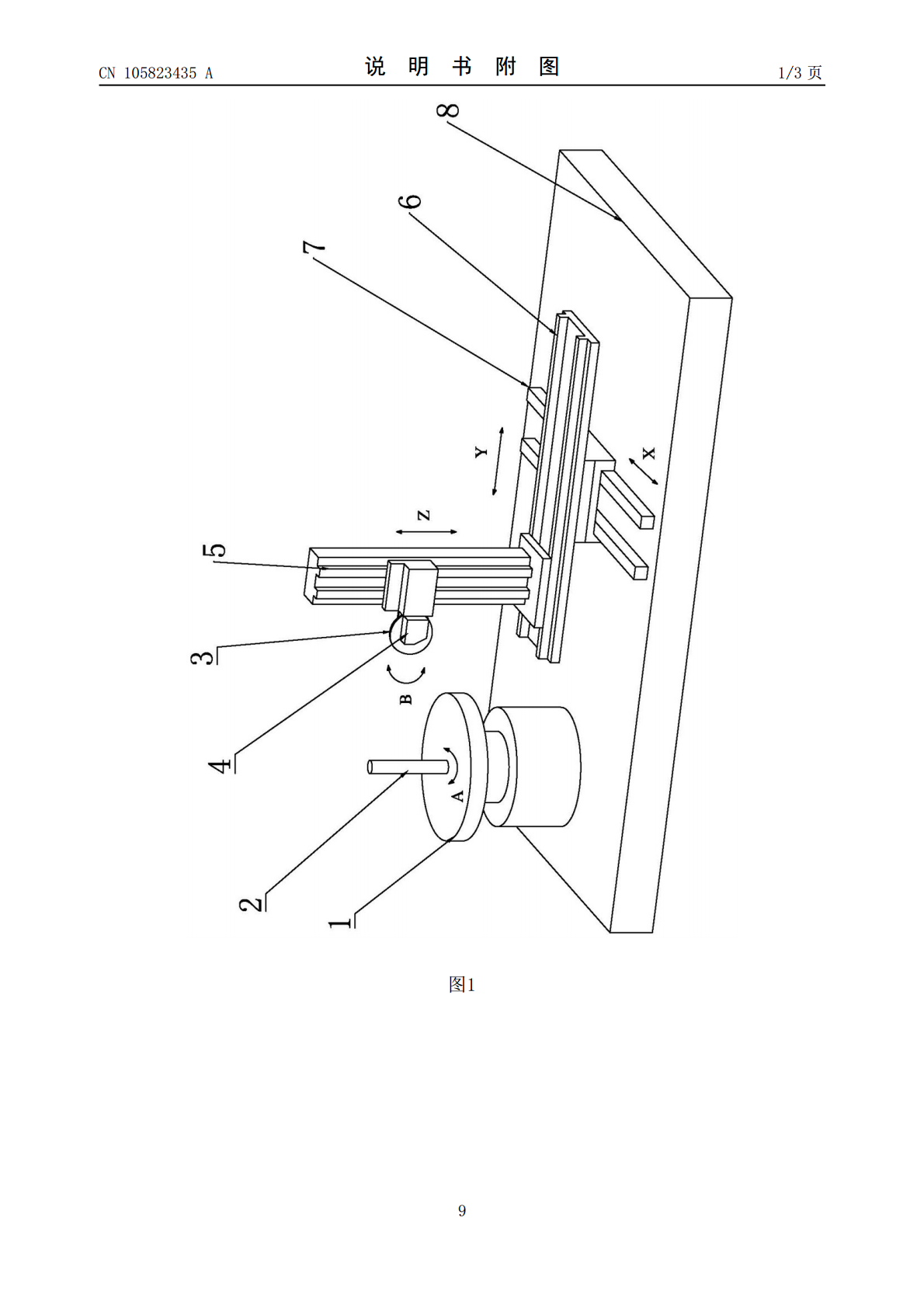
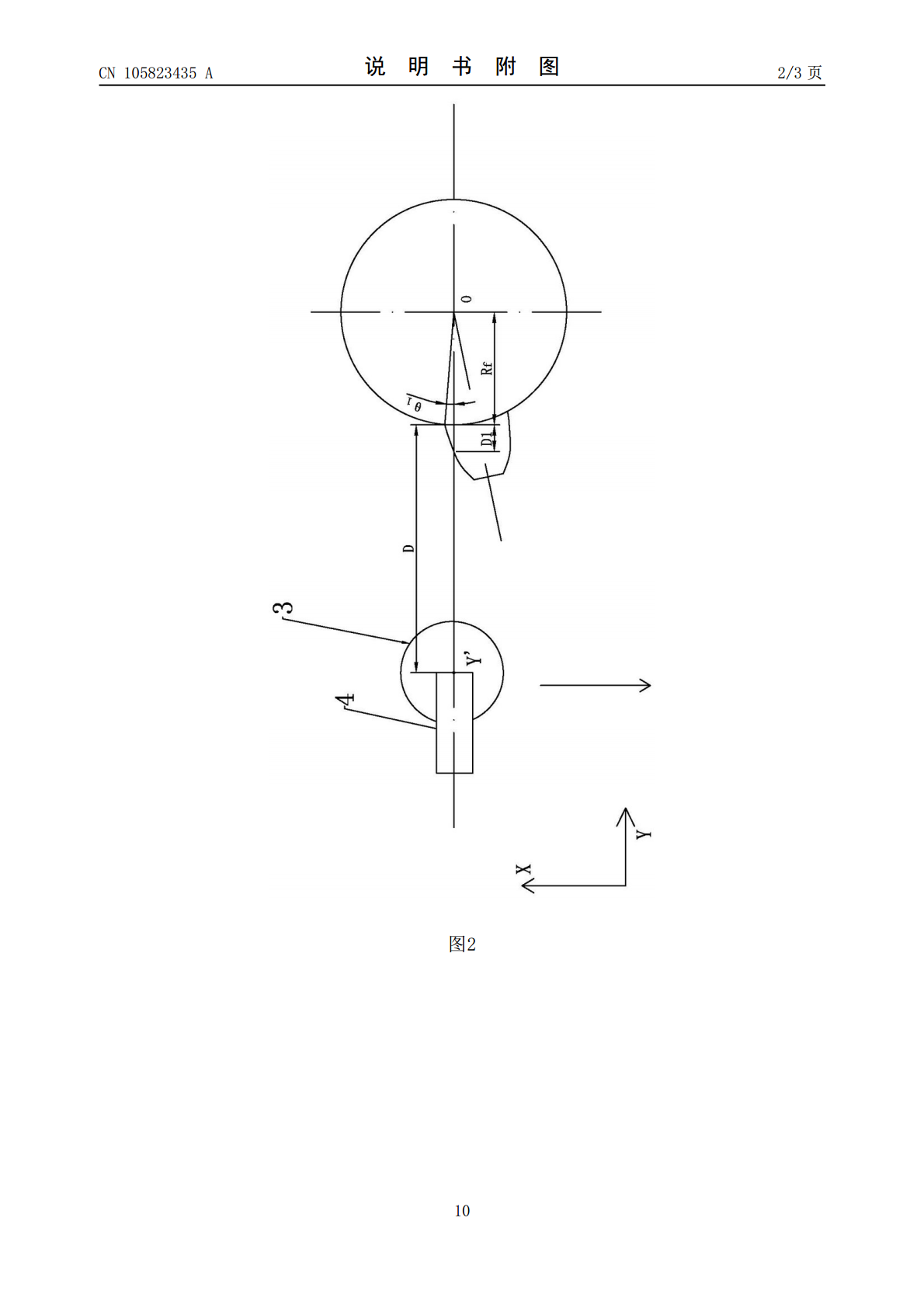
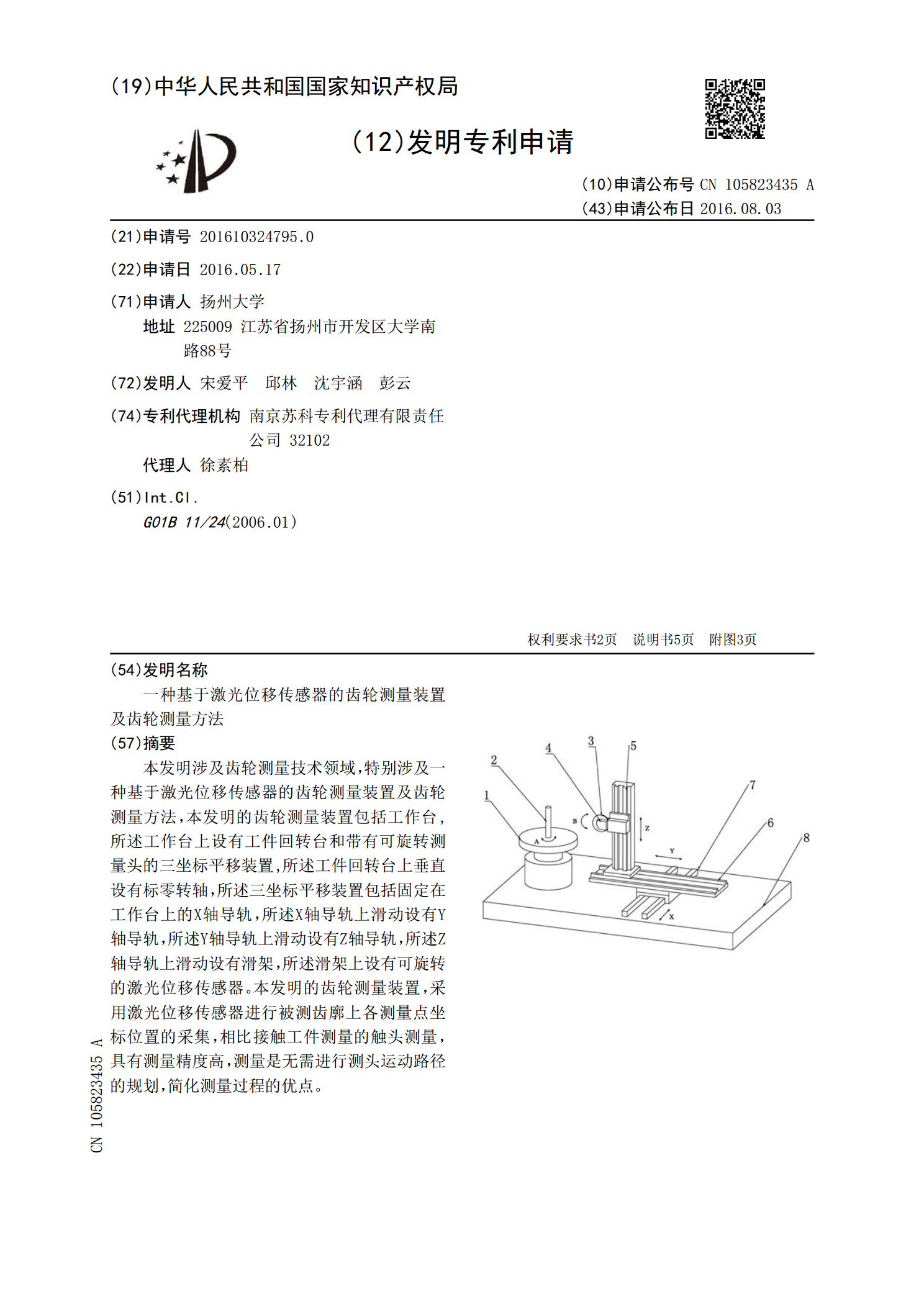
本发明涉及齿轮测量技术领域,特别涉及一种基于激光位移传感器的齿轮测量装置及齿轮测量方法,本发明的齿轮测量装置包括工作台,所述工作台上设有工件回转台和带有可旋转测量头的三坐标平移装置,所述工件回转台上垂直设有标零转轴,所述三坐标平移装置包括固定在工作台上的X轴导轨,所述X轴导轨上滑动设有Y轴导轨,所述Y轴导轨上滑动设有Z轴导轨,所述Z轴导轨上滑动设有滑架,所述滑架上设有可旋转的激光位移传感器。本发明的齿轮测量装置,采用激光位移传感器进行被测齿廓上各测量点坐标位置的采集,相比接触工件测量的触头测量,具有测量精
一种基于激光位移传感器的螺栓螺距测量装置及测量方法.pdf
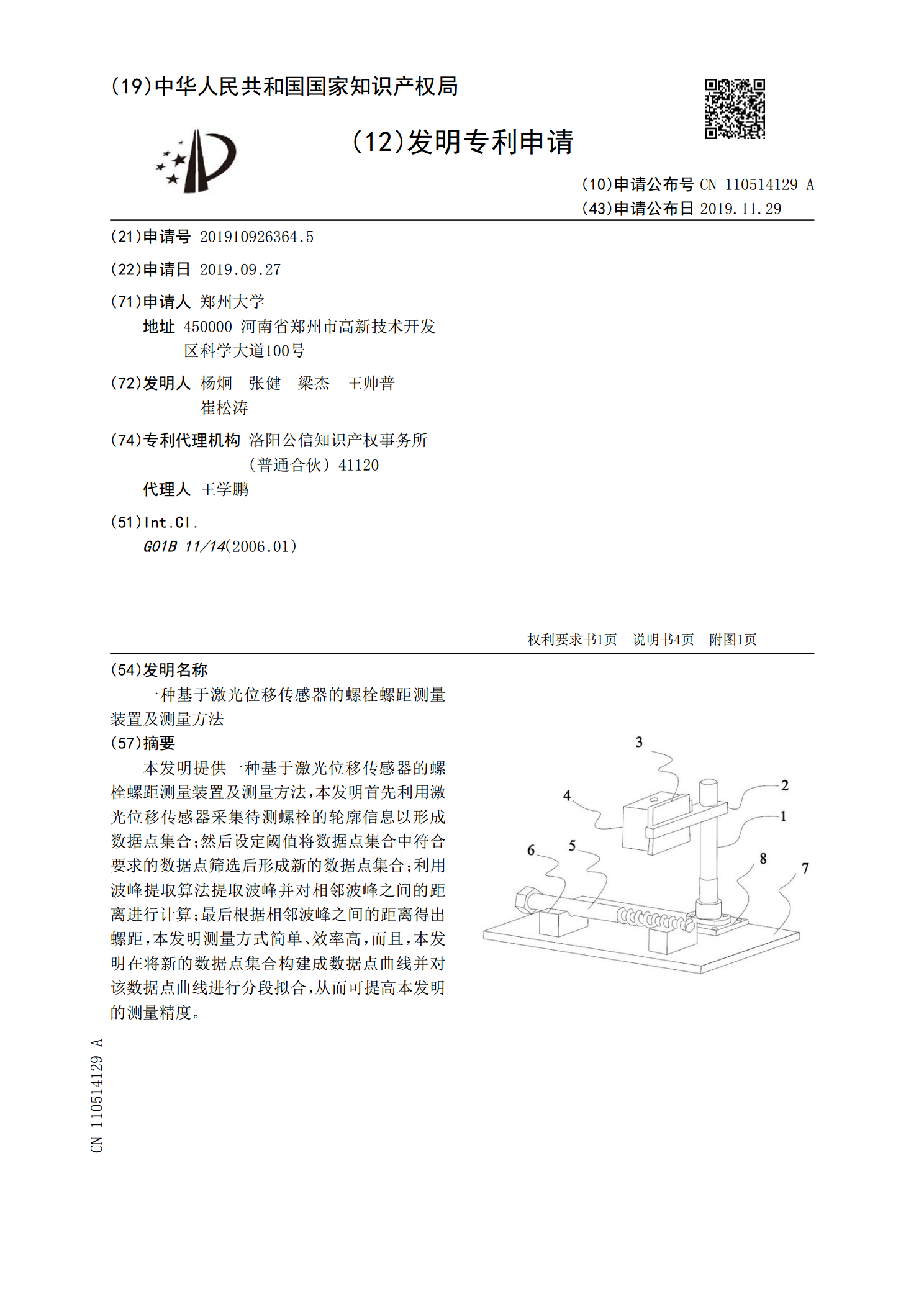
本发明提供一种基于激光位移传感器的螺栓螺距测量装置及测量方法,本发明首先利用激光位移传感器采集待测螺栓的轮廓信息以形成数据点集合;然后设定阈值将数据点集合中符合要求的数据点筛选后形成新的数据点集合;利用波峰提取算法提取波峰并对相邻波峰之间的距离进行计算;最后根据相邻波峰之间的距离得出螺距,本发明测量方式简单、效率高,而且,本发明在将新的数据点集合构建成数据点曲线并对该数据点曲线进行分段拟合,从而可提高本发明的测量精度。

一种基于激光位移传感器的高精度振动位移测量方法.pptx
基于激光位移传感器的高精度振动位移测量方法目录添加章节标题激光位移传感器原理激光位移传感器的组成激光位移传感器的工作原理激光位移传感器的特点高精度振动位移测量方法测量原理测量系统组成测量步骤测量精度影响因素实验验证与结果分析实验设备与环境实验过程与数据采集数据处理与分析方法实验结果与误差分析应用场景与优势分析应用领域与适用范围与传统测量方法的比较优势对工业生产与科学研究的价值未来应用前景与挑战结论与展望研究结论总结研究不足与展望THANKYOU
基于激光跟踪技术的大型齿轮测量方法.pdf
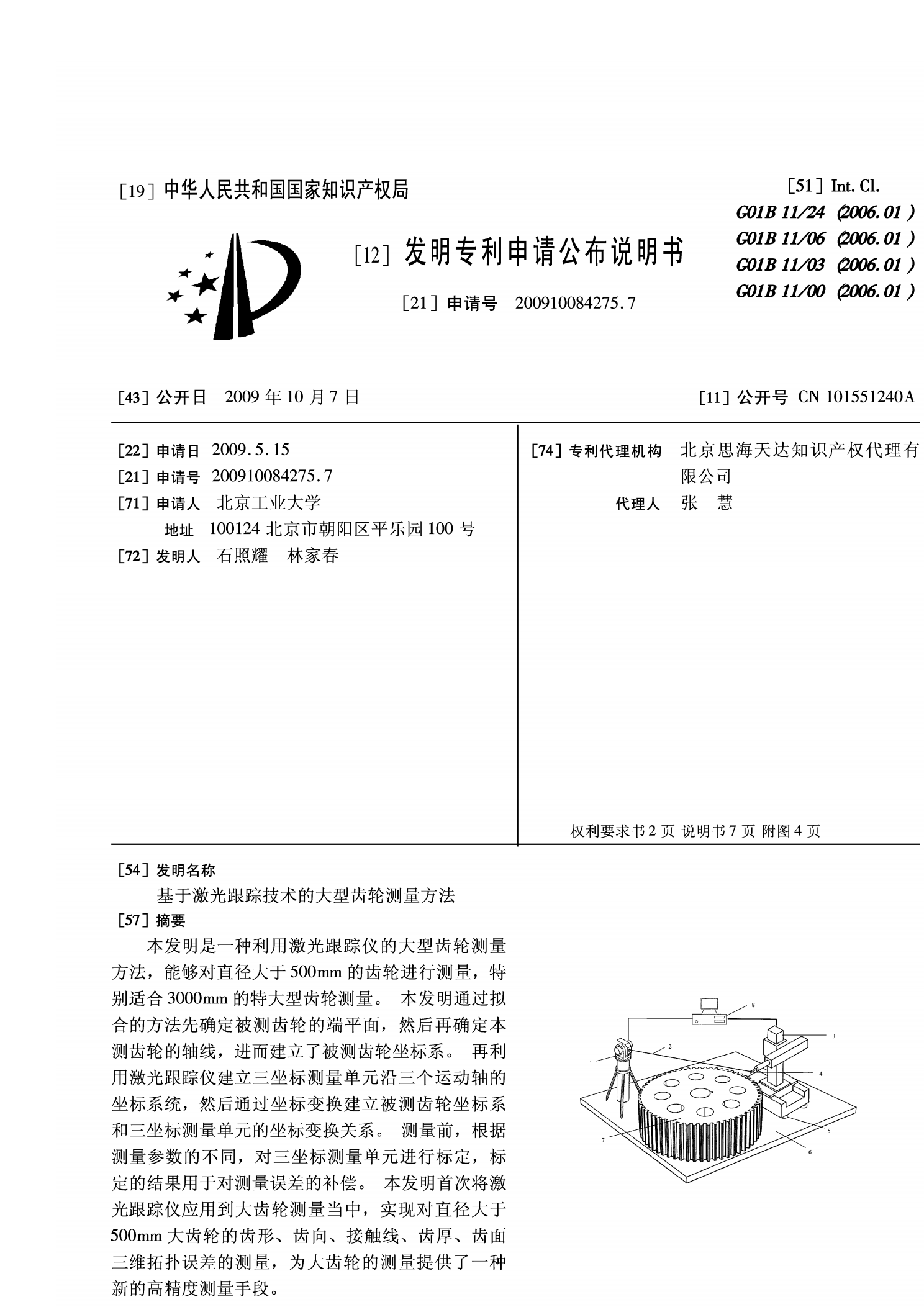
本发明是一种利用激光跟踪仪的大型齿轮测量方法,能够对直径大于500mm的齿轮进行测量,特别适合3000mm的特大型齿轮测量。本发明通过拟合的方法先确定被测齿轮的端平面,然后再确定本测齿轮的轴线,进而建立了被测齿轮坐标系。再利用激光跟踪仪建立三坐标测量单元沿三个运动轴的坐标系统,然后通过坐标变换建立被测齿轮坐标系和三坐标测量单元的坐标变换关系。测量前,根据测量参数的不同,对三坐标测量单元进行标定,标定的结果用于对测量误差的补偿。本发明首次将激光跟踪仪应用到大齿轮测量当中,实现对直径大于500mm
一种多自由度激光位移传感器系统及弧齿锥齿轮测量方法.pdf
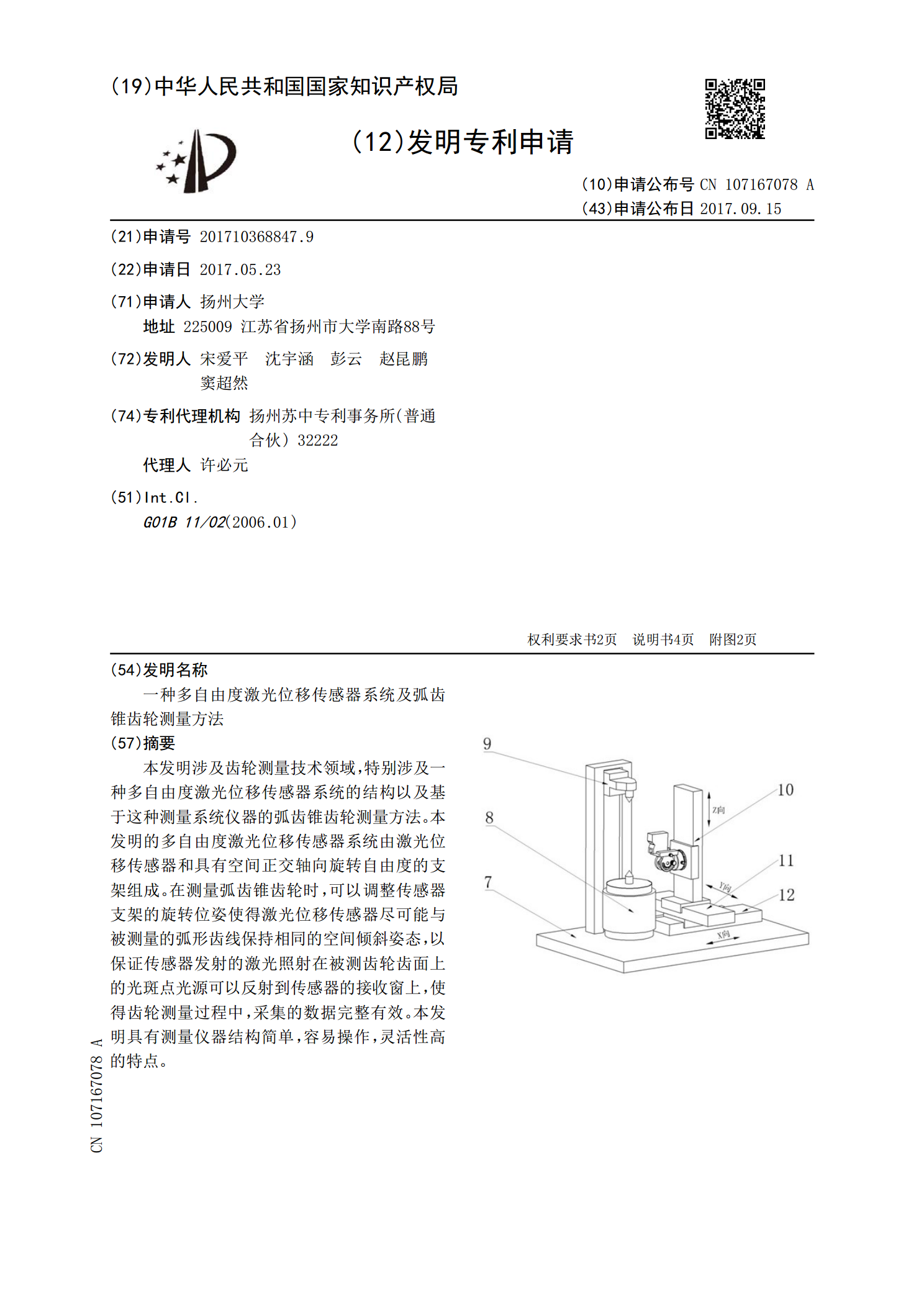
本发明涉及齿轮测量技术领域,特别涉及一种多自由度激光位移传感器系统的结构以及基于这种测量系统仪器的弧齿锥齿轮测量方法。本发明的多自由度激光位移传感器系统由激光位移传感器和具有空间正交轴向旋转自由度的支架组成。在测量弧齿锥齿轮时,可以调整传感器支架的旋转位姿使得激光位移传感器尽可能与被测量的弧形齿线保持相同的空间倾斜姿态,以保证传感器发射的激光照射在被测齿轮齿面上的光斑点光源可以反射到传感器的接收窗上,使得齿轮测量过程中,采集的数据完整有效。本发明具有测量仪器结构简单,容易操作,灵活性高的特点。