
一种多自由度无人机航拍自稳云台.pdf

琰琬****买买


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种多自由度无人机航拍自稳云台.pdf
本发明涉及一种多自由度无人机航拍自稳云台,包括固定机架,固定机架包括下平台,下平台的上端面中部通过轴承安装有传动轴,传动轴的中部通过键安装有传动齿轮,传动齿轮沿轴向方向分别与六个传动支链相啮合,六个传动支链上的六个驱动轴上端通过轴承均与支撑台相连;所述支撑台的中部通过轴承与传动轴相连,支撑台的下端面沿轴线方形均匀焊接有六根支撑柱;六根支撑柱的下端面均安装在下平台上;传动轴的上端通过联轴器与传动丝杠相连;传动丝杠的中部通过螺纹连接方式安装有传动滑块。本发明可以实现无人机的稳定升降航拍功能,具有结构简单、自身
一种多旋翼航拍无人机三轴自稳云台.pdf
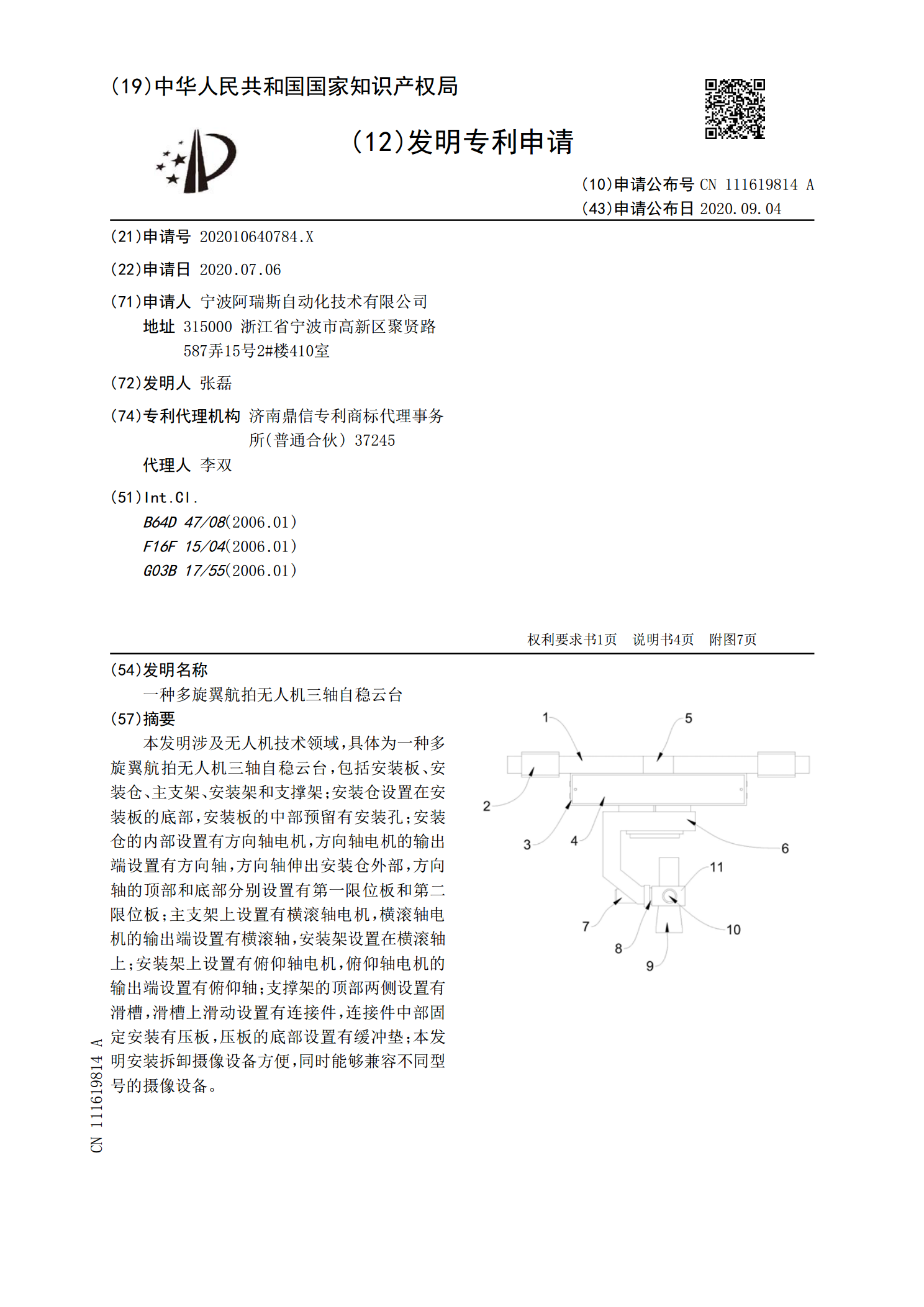
本发明涉及无人机技术领域,具体为一种多旋翼航拍无人机三轴自稳云台,包括安装板、安装仓、主支架、安装架和支撑架;安装仓设置在安装板的底部,安装板的中部预留有安装孔;安装仓的内部设置有方向轴电机,方向轴电机的输出端设置有方向轴,方向轴伸出安装仓外部,方向轴的顶部和底部分别设置有第一限位板和第二限位板;主支架上设置有横滚轴电机,横滚轴电机的输出端设置有横滚轴,安装架设置在横滚轴上;安装架上设置有俯仰轴电机,俯仰轴电机的输出端设置有俯仰轴;支撑架的顶部两侧设置有滑槽,滑槽上滑动设置有连接件,连接件中部固定安装有压

小型无人机航拍初探之增稳云台浅析.docx
小型无人机航拍初探之增稳云台浅析Title:AnIntroductoryAnalysisofStabilizedGimbalsforSmall-ScaleDroneAerialPhotographyAbstract:Small-scaleunmannedaerialvehicles(UAVs)equippedwithstabilizedgimbalshaverevolutionizedthefieldofaerialphotography,providingstableandhigh-qualityima

一种调节方便的无人机航拍云台.pdf
本发明提供了一种调节方便的无人机航拍云台,包括连接板;所述连接板的下表面左右两侧对称的连接安装有连接柱;所述连接柱之间设有调整电机;所述橡胶垫镶嵌固定在连接板的中部下表面内;所述传动轴的下端焊接在调整承载轮上;所述防护罩活动放置在承载板上;所述调整承载轮的下表面左右两侧对称的固定有支板;所述连接轴之间连接固定有调整块;所述调整块呈长方体型,由聚乙烯塑料制成,其中部开有相机安装腔;所述相机安装腔的左右两侧设有压板;调整块的上表面壁中沿连接轴前后对称的镶嵌安装连接铰链;本发明结构较为新颖,使用和操作简单方便,
一种具有拍摄增稳云台装置的航拍无人机.pdf
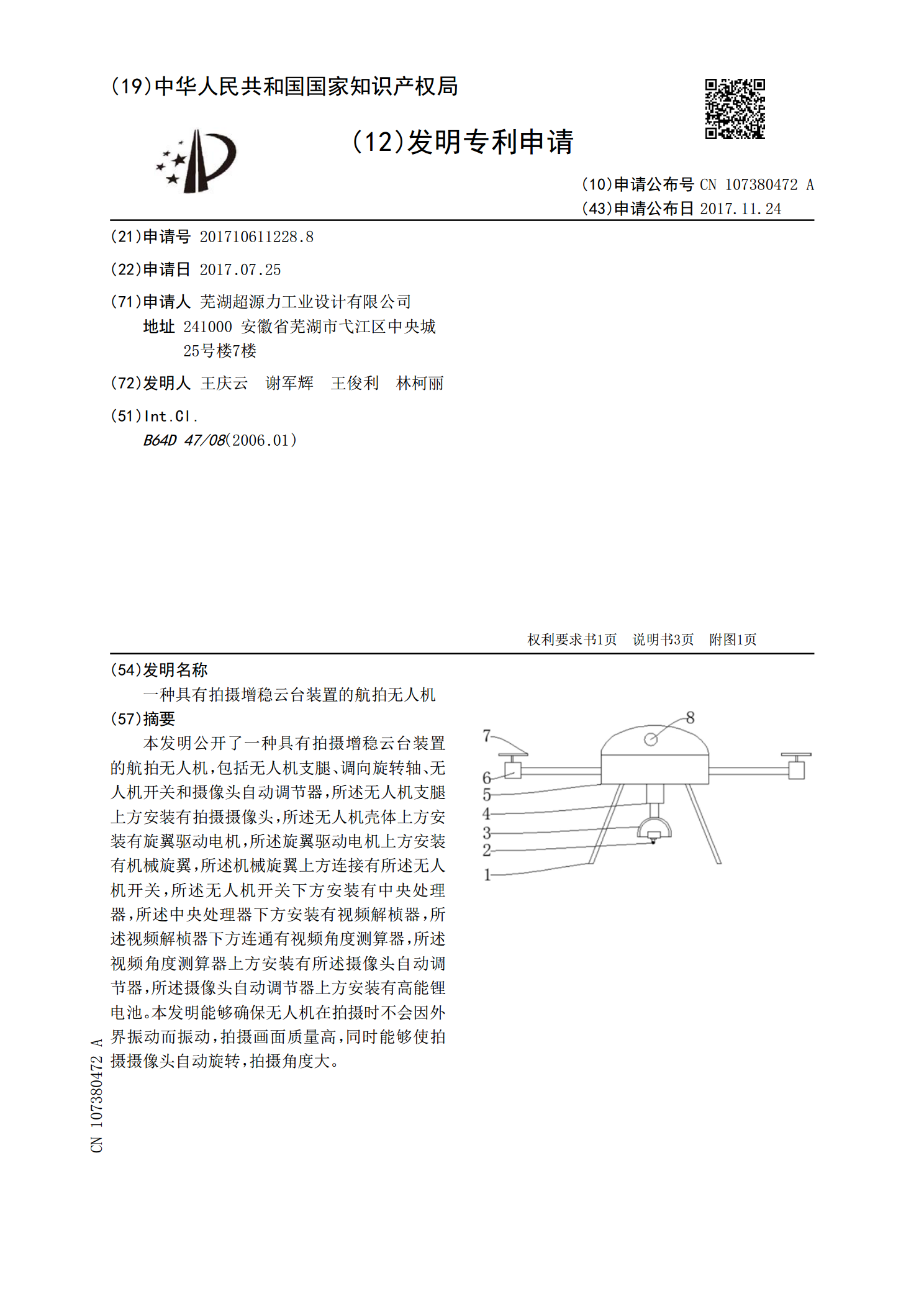
本发明公开了一种具有拍摄增稳云台装置的航拍无人机,包括无人机支腿、调向旋转轴、无人机开关和摄像头自动调节器,所述无人机支腿上方安装有拍摄摄像头,所述无人机壳体上方安装有旋翼驱动电机,所述旋翼驱动电机上方安装有机械旋翼,所述机械旋翼上方连接有所述无人机开关,所述无人机开关下方安装有中央处理器,所述中央处理器下方安装有视频解桢器,所述视频解桢器下方连通有视频角度测算器,所述视频角度测算器上方安装有所述摄像头自动调节器,所述摄像头自动调节器上方安装有高能锂电池。本发明能够确保无人机在拍摄时不会因外界振动而振动,