
一种面向船舱监测的爬壁机器人设计及实现的任务书.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种面向船舱监测的爬壁机器人设计及实现的任务书.docx
一种面向船舱监测的爬壁机器人设计及实现的任务书任务书目的本任务书旨在设计并实现一种能够爬行在船舱壁面,用于监测船舱设备运行状态的机器人。该机器人需要具有较好的动力学性能、足够的传感器、便于控制与操作等特点。背景船舶作为一种大型复杂的运输工具,使用寿命长、航行时间久,维护和管理难度较大。为了保证船舶正常运行,需要对船舱内部设备进行监测与维护。传统的监测方法需要人为地进入船舱内部进行检查,既耗费时间又存在一定的安全隐患。因此,设计一种能够爬行在船舱壁面的机器人,用于船舱内部设备的监测与维护,具有十分重要的意义

一种面向船舱监测的爬壁机器人设计及实现的开题报告.docx
一种面向船舱监测的爬壁机器人设计及实现的开题报告一、研究背景随着科技的不断发展和进步,机器人技术被越来越广泛的应用于各个领域。在海运行业中,为了保证船舶的安全和正常运行,需要对船舶进行定期检查和维护。然而,对于有些特殊的船舱环境,如狭窄、高处、危险、污染严重,人类无法进入进行检查,而机器人恰好具备这些特点,因此在船舶检查中具有很大的应用前景。本文研究的是一种面向船舱监测的爬壁机器人,主要用于船舶壁面的检查和维护。该机器人采用自主运动方式,能够适应不同的壁面高度、坡度和倾角,实现高效、精准的船舶监测。二、研

仿生爬壁机器人设计与实现的开题报告.docx
仿生爬壁机器人设计与实现的开题报告题目:仿生爬壁机器人设计与实现一、研究背景与意义随着人们生活水平的提高,对日常生活中各个方面的要求也越来越高。在建筑维修、火险灾救和自动巡检等领域,经常需要高空、狭小或人类难以到达的地方进行检测和维护。而传统的人为施工不但危险,还耗时费力,这时候机器人的普及和应用显得极其重要。而在这些极易发生危险的环境中,仿生爬壁机器人被广泛地研究和应用,并赋予了极大的机遇和挑战。仿生爬壁机器人是模拟自然界中爬行动物的生物形态和行为,并将其应用于爬墙机器人的设计中。与传统爬行机器人相比,
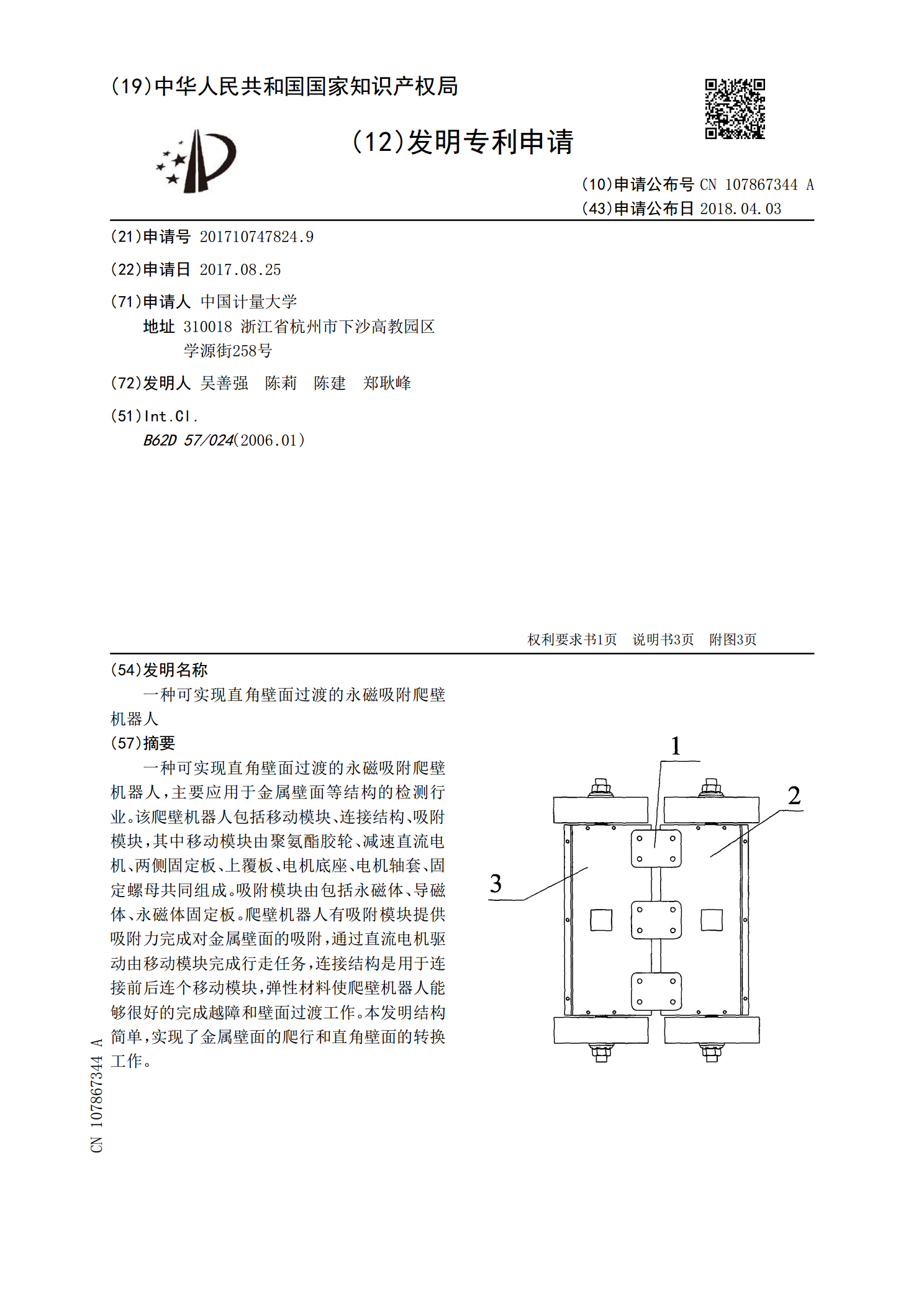
一种可实现直角壁面过渡的永磁吸附爬壁机器人.pdf
一种可实现直角壁面过渡的永磁吸附爬壁机器人,主要应用于金属壁面等结构的检测行业。该爬壁机器人包括移动模块、连接结构、吸附模块,其中移动模块由聚氨酯胶轮、减速直流电机、两侧固定板、上覆板、电机底座、电机轴套、固定螺母共同组成。吸附模块由包括永磁体、导磁体、永磁体固定板。爬壁机器人有吸附模块提供吸附力完成对金属壁面的吸附,通过直流电机驱动由移动模块完成行走任务,连接结构是用于连接前后连个移动模块,弹性材料使爬壁机器人能够很好的完成越障和壁面过渡工作。本发明结构简单,实现了金属壁面的爬行和直角壁面的转换工作。
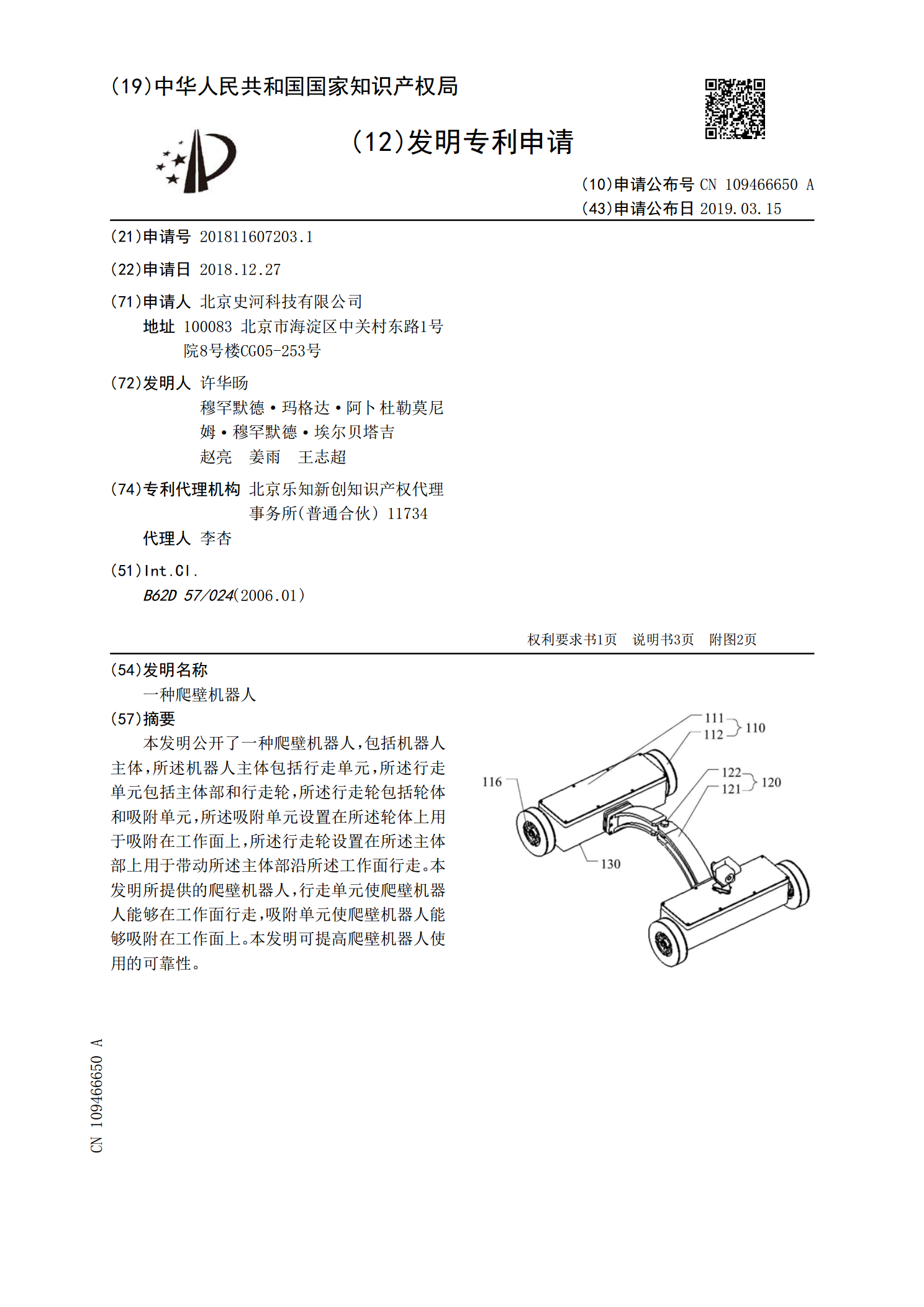
一种爬壁机器人.pdf
本发明公开了一种爬壁机器人,包括机器人主体,所述机器人主体包括行走单元,所述行走单元包括主体部和行走轮,所述行走轮包括轮体和吸附单元,所述吸附单元设置在所述轮体上用于吸附在工作面上,所述行走轮设置在所述主体部上用于带动所述主体部沿所述工作面行走。本发明所提供的爬壁机器人,行走单元使爬壁机器人能够在工作面行走,吸附单元使爬壁机器人能够吸附在工作面上。本发明可提高爬壁机器人使用的可靠性。