
物体尺寸测量方法、装置和系统.pdf

是你****韵呀


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

物体尺寸测量方法、装置和系统.pdf
本申请公开了一种物体尺寸测量方法、装置和系统,其中,方法包括:通过相机采集标定板在测量平台上不同位置的多张标定图像;根据多张标定图像确定相机的拍摄参数,并根据拍摄参数计算与单位像素对应的物理长度;通过相机采集待测物体的初始图像,并根据拍摄参数对初始图像进行矫正处理生成目标图像;应用预设算法从目标图像中提取与目标轮廓对应的目标像素,并计算目标像素的数量;根据目标像素的数量以及与单位像素对应的物理长度,计算待测物体的尺寸信息。由此,避免人工进行物体尺寸测量导致的测量精度和效率不高的技术问题,提供了一种自动尺寸

物体尺寸的测量方法和装置.pdf
本发明实施例公开了一种物体尺寸的测量方法和装置,涉及数据处理技术领域。其中,物体尺寸的测量方法包括:获取摄像头所捕捉到的被测物体的图像信息;根据所述图像信息确定各像素点与所述被测物体之间的距离;根据所述各像素点与所述被测物体之间的距离,确定所述被测物体的尺寸。本发明实施例的技术方案,通过被测物体的图像信息确定各像素点与所述被测物体之间的距离,进而确定被测物体的尺寸,相比较于采用测量工具测量物体尺寸的方法,用户不用专门携带量尺等专门的测量工具,只需要采用随身携带的终端等具有拍照功能的设备捕捉被测物体即可,操
基于轮对尺寸测量装置的轮对尺寸测量方法和系统.pdf
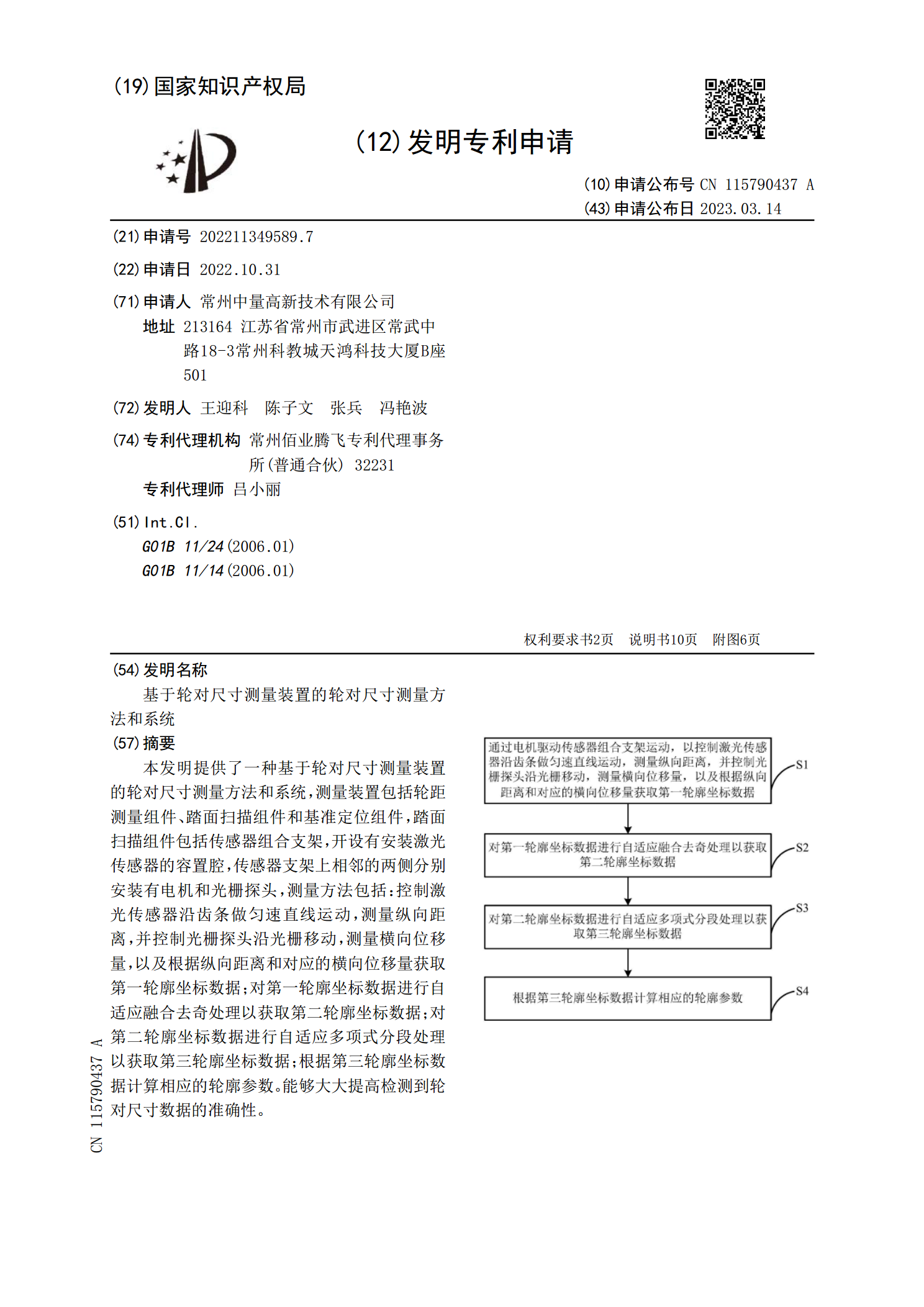
本发明提供了一种基于轮对尺寸测量装置的轮对尺寸测量方法和系统,测量装置包括轮距测量组件、踏面扫描组件和基准定位组件,踏面扫描组件包括传感器组合支架,开设有安装激光传感器的容置腔,传感器支架上相邻的两侧分别安装有电机和光栅探头,测量方法包括:控制激光传感器沿齿条做匀速直线运动,测量纵向距离,并控制光栅探头沿光栅移动,测量横向位移量,以及根据纵向距离和对应的横向位移量获取第一轮廓坐标数据;对第一轮廓坐标数据进行自适应融合去奇处理以获取第二轮廓坐标数据;对第二轮廓坐标数据进行自适应多项式分段处理以获取第三轮廓坐

一种物体尺寸测量方法及装置.pdf
本发明提供一种物体尺寸测量方法及装置。所述方法包括:获取待测量物体的顶部图像,所述顶部图像中包含有光斑信息以及所述待测量物体的顶部轮廓信息,在所述顶部图像中确定所述光斑的像素尺寸信息、所述待测量物体的顶部宽度对应的像素尺寸信息和/或所述待测量物体的顶部长度对应的像素尺寸信息;根据所述光斑的实际尺寸信息,在所述顶部图像中所述光斑的像素尺寸信息以及所述待测量物体的顶部对应的像素尺寸信息,确定所述待测量物体的宽度信息和/或长度信息。本发明提供的物体尺寸测量方法及装置,使用方便,能快速测量物体尺寸。

一种挂车轮廓尺寸测量方法、装置和系统.pdf
本发明提供一种挂车轮廓尺寸测量方法、装置和系统,所述方法包括:利用第一激光测距单元采集到的待测仓栅式挂车在不同时刻的第一测距信息,获取所述挂车的侧面轮廓信息;利用第二激光测距单元采集到的所述挂车在不同时刻的第二测距信息,获取所述挂车的顶部轮廓信息;根据所述侧面轮廓信息和所述顶部轮廓信息,得到所述挂车的轮廓尺寸信息;其中,所述轮廓尺寸信息包括:所述挂车的长度、销轴距和栏板高度中的至少一个。本发明提供的挂车轮廓尺寸测量方法、装置和系统,可以提高测量精度和检车效率,所述系统结构简单,成本低,非常适合机动车检测站