
基于点云投影轮廓签名和分布矩阵的全局点云描述方法.pdf

猫巷****志敏


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于点云投影轮廓签名和分布矩阵的全局点云描述方法.pdf
本发明涉及一种基于投影轮廓签名和分布矩阵的点云全局描述方法。首先利用目标点云的空间坐标信息构建具有旋转和平移不变性的本地参考坐标系,然后将目标点云变换至参考坐标系下。构建姿态归一化后目标点云的空间边界盒,将目标点云分别投影到边界盒的三个相邻平面上。为了增强描述子对目标点云可视部分的表示能力,分别计算点云投影在各个投影平面的投影轮廓签名和分布矩阵,并根据点云投影的统计特征确定相关的串联规则。依次将目标点云在三个投影平面的子特征以直方图的形式串联得到最终的CSDM描述子。
基于特征点法线与全局点云曲率优化的点云配准方法.pdf
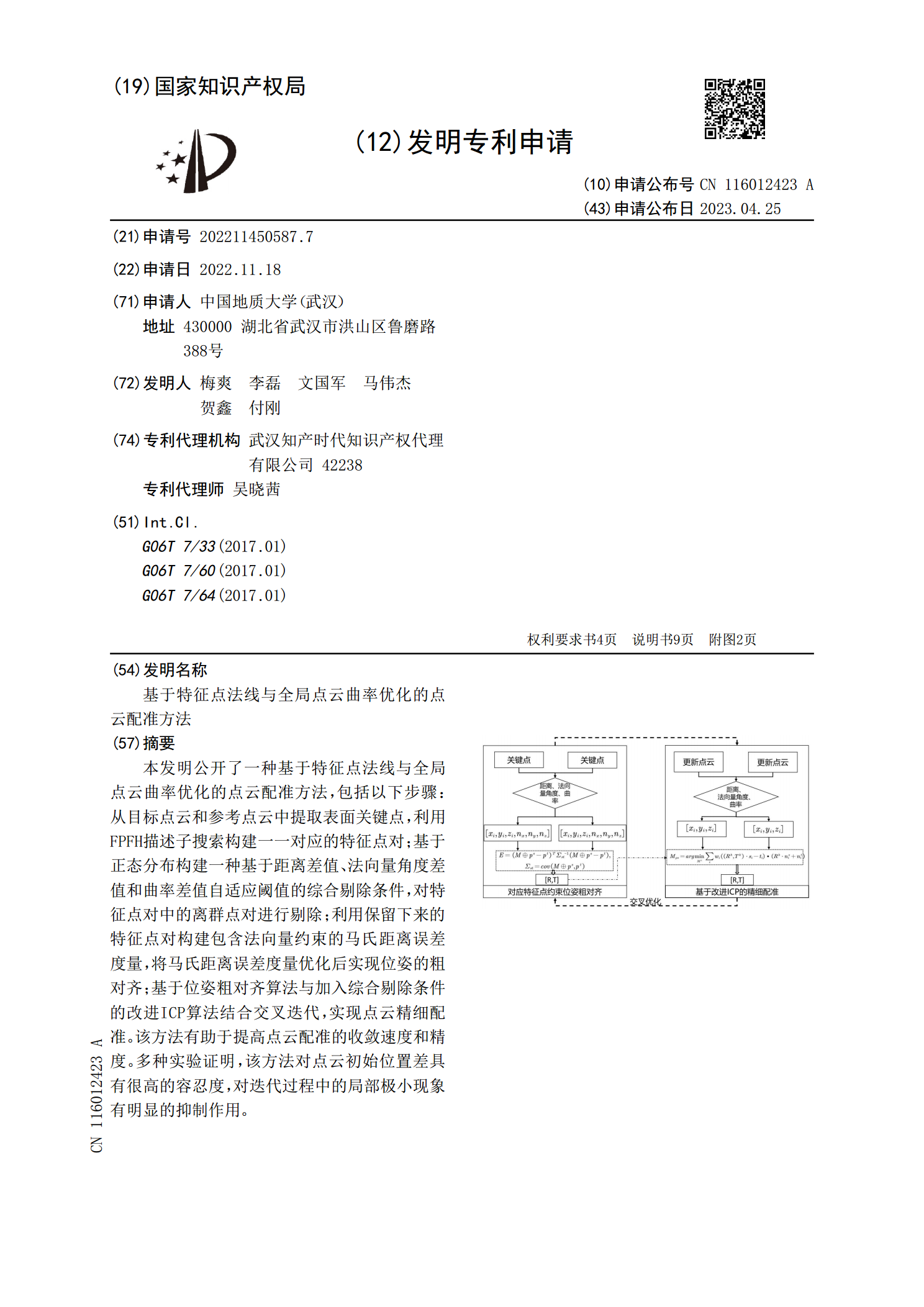
本发明公开了一种基于特征点法线与全局点云曲率优化的点云配准方法,包括以下步骤:从目标点云和参考点云中提取表面关键点,利用FPFH描述子搜索构建一一对应的特征点对;基于正态分布构建一种基于距离差值、法向量角度差值和曲率差值自适应阈值的综合剔除条件,对特征点对中的离群点对进行剔除;利用保留下来的特征点对构建包含法向量约束的马氏距离误差度量,将马氏距离误差度量优化后实现位姿的粗对齐;基于位姿粗对齐算法与加入综合剔除条件的改进ICP算法结合交叉迭代,实现点云精细配准。该方法有助于提高点云配准的收敛速度和精度。多种

基于点云数据的车辆轮廓检测方法和装置.pdf
本申请公开了基于点云数据的车辆轮廓检测方法和装置。所述的方法包括:获取待训练点云数据;响应于对待训练点云数据中的各点的标注,生成与待训练点云数据中的各点对应的标签数据,其中,标注用于指示各待训练点云数据中的各点是否属于车辆轮廓;基于待训练点云数据中的各点和与待训练点云数据中的各点对应的标签数据训练全卷积神经网络模型,以得到车辆检测模型;以及获取待检测点云数据,并基于车辆检测模型,得到与待检测点云数据中的各待检测点对应的检测结果。该实施方式实现了车辆轮廓的准确检测。

基于SVM和空间投影的点云空洞修补方法.docx
基于SVM和空间投影的点云空洞修补方法一、引言在三维点云数据处理中,点云空洞是难以避免的问题。点云空洞的存在对于点云数据的处理和应用都会带来很大的影响。因此,点云数据修复、填充空洞的研究是点云数据处理中的一个重要课题。传统的点云数据修复方法多采用基于曲面重建的方法,但是该方法较为耗时,且需要保证点云点数较多,否则会影响修复效果。本文提出了一种基于SVM和空间投影的点云空洞修复方法,旨在提高点云数据修复和填充空洞的效果和效率。二、SVMSVM是一种分类算法,它可以在高维空间中找到一个最优超平面,并将不同类别

基于矩阵指数的点云配准方法.docx
基于矩阵指数的点云配准方法基于矩阵指数的点云配准方法摘要:点云配准是计算机视觉与机器人技术中的重要问题,对于实现三维环境重建、目标识别和导航等应用具有关键性的作用。本文提出了一种基于矩阵指数的点云配准方法,通过将点云转化为矩阵表示,并利用矩阵指数的性质来实现点云之间的配准。实验结果表明,该方法能够有效地实现点云配准,并且具有较高的配准精度和计算效率。关键词:点云配准,矩阵指数,三维环境重建,目标识别,导航1.引言随着三维数据获取和处理技术的发展,点云成为了描述三维场景的重要数据形式。点云配准是将多个点云对