
基于特征点法线与全局点云曲率优化的点云配准方法.pdf

猫巷****志敏

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于特征点法线与全局点云曲率优化的点云配准方法.pdf
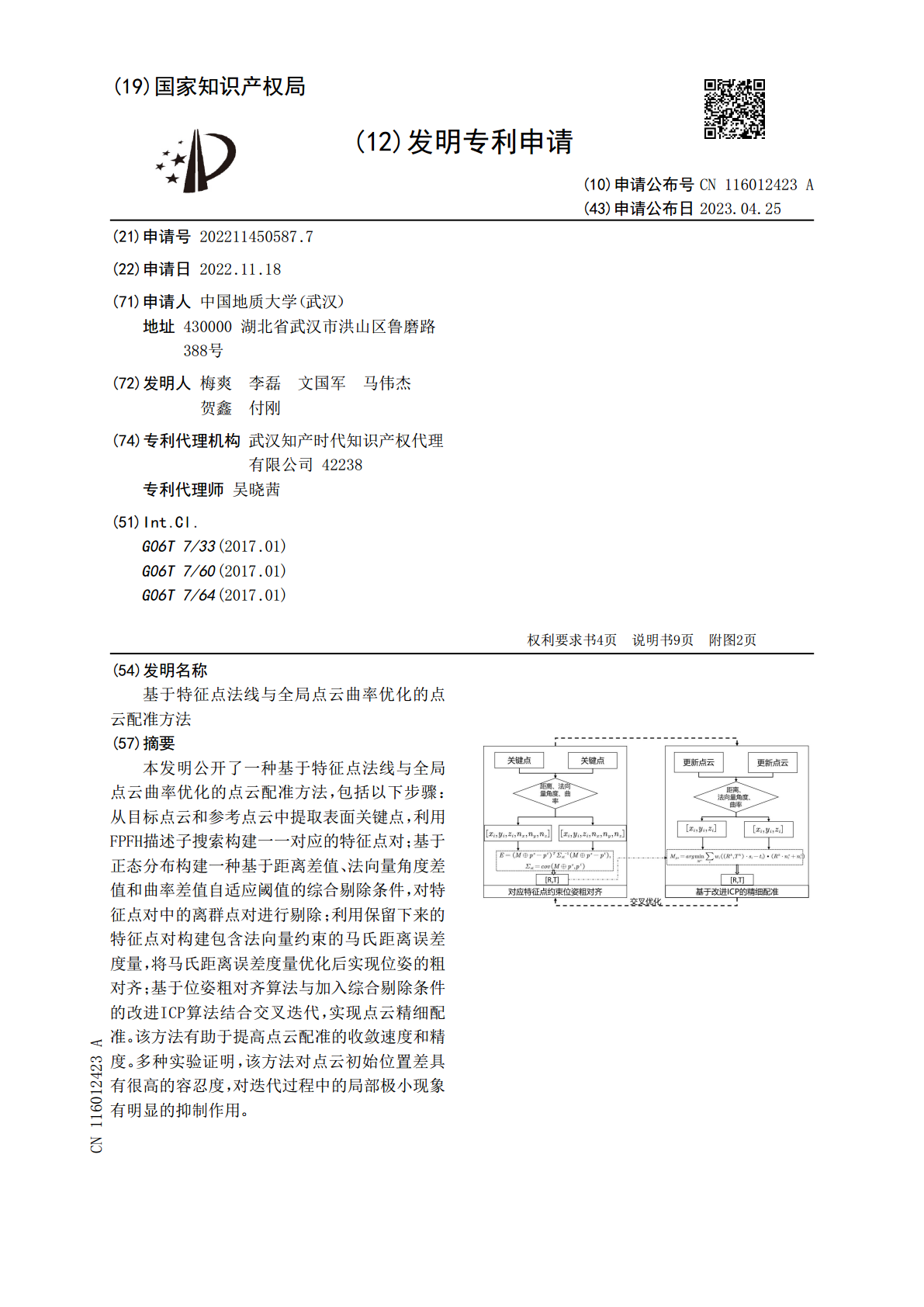
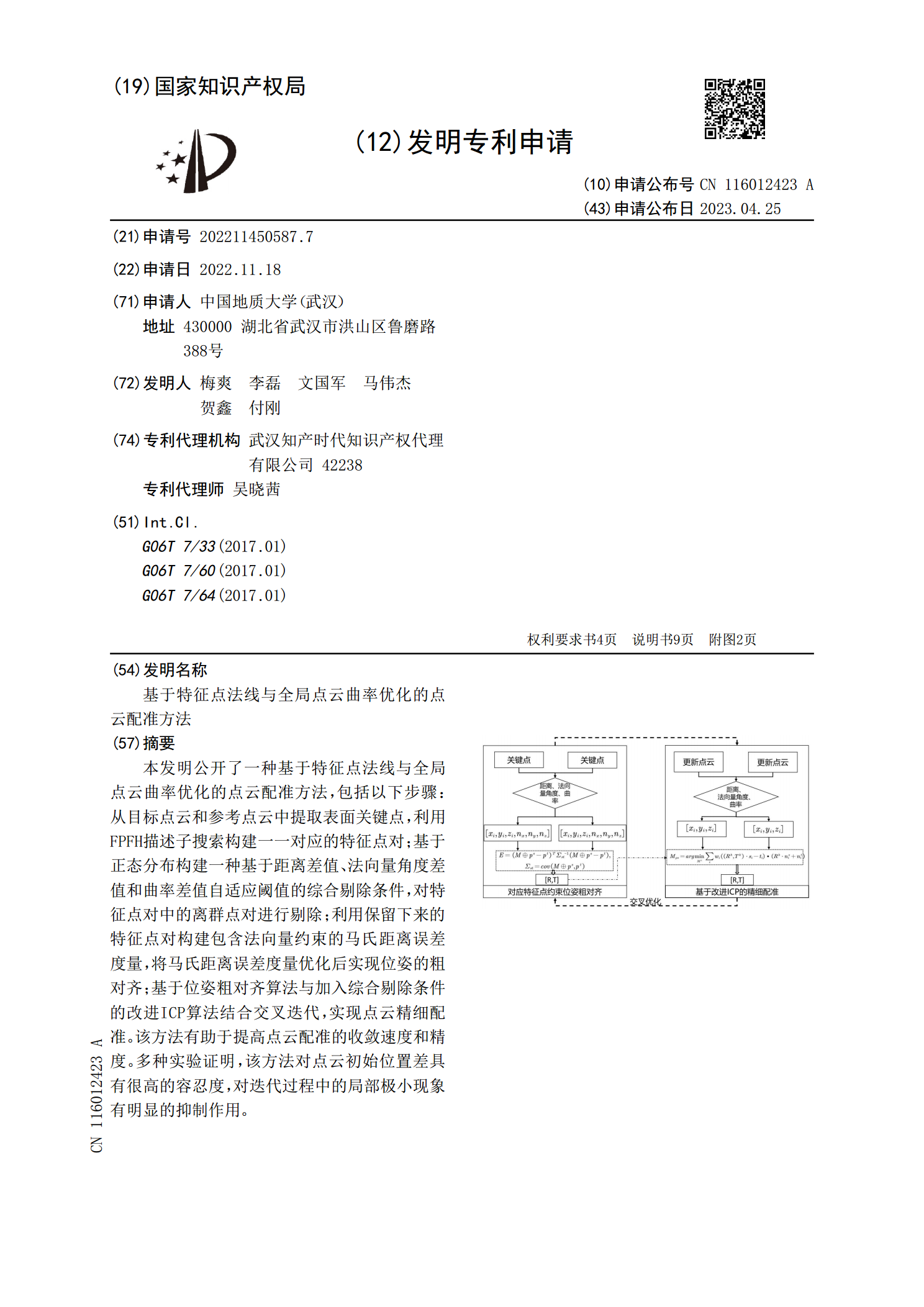
本发明公开了一种基于特征点法线与全局点云曲率优化的点云配准方法,包括以下步骤:从目标点云和参考点云中提取表面关键点,利用FPFH描述子搜索构建一一对应的特征点对;基于正态分布构建一种基于距离差值、法向量角度差值和曲率差值自适应阈值的综合剔除条件,对特征点对中的离群点对进行剔除;利用保留下来的特征点对构建包含法向量约束的马氏距离误差度量,将马氏距离误差度量优化后实现位姿的粗对齐;基于位姿粗对齐算法与加入综合剔除条件的改进ICP算法结合交叉迭代,实现点云精细配准。该方法有助于提高点云配准的收敛速度和精度。多种

基于特征点的曲面点云配准方法.docx
基于特征点的曲面点云配准方法基于特征点的曲面点云配准方法摘要:点云配准是计算机视觉和三维重建领域的核心任务之一。然而,由于噪声、遮挡和刚性变形等问题,点云配准仍然是一个具有挑战性的任务。本文提出了一种基于特征点的曲面点云配准方法,该方法可以在处理复杂点云场景时提供高精度和鲁棒性。关键词:点云配准,特征点,曲面,鲁棒性,高精度1.引言点云是表示三维空间中对象的一种重要形式。点云配准是将多个点云数据集对齐以获得一个统一的坐标系的过程。在计算机视觉和三维重建领域,点云配准被广泛应用于目标检测、姿态估计、三维建模

基于球面特征的点云配准方法研究.docx
基于球面特征的点云配准方法研究标题:基于球面特征的点云配准方法研究摘要:点云配准是三维重建和计算机视觉中的一个重要问题,它在许多领域如机器人导航、医学图像处理和工业制造等方面发挥着重要作用。然而,由于点云数据的非结构性和噪声等问题,实现精确的点云配准仍然是一个具有挑战性的任务。本文针对这一问题,提出了一种基于球面特征的点云配准方法,通过构建球面特征描述点云的局部几何信息,将点云配准问题转化为球面特征之间的匹配问题。1.引言随着三维扫描技术和传感器的快速发展,点云数据正变得越来越普遍。然而,由于扫描条件和设

基于曲率法线流的树点云骨架提取方法.docx
基于曲率法线流的树点云骨架提取方法基于曲率法线流的树点云骨架提取方法摘要:随着三维点云数据的广泛应用,点云骨架提取成为研究热点之一。本文提出一种基于曲率法线流的树点云骨架提取方法。该方法通过计算曲率法线流场来分析点云曲率和法线的变化,从而提取出树点云的骨架结构。实验表明,该方法能够在不同的点云数据集上提取出高质量的树骨架,具有较好的鲁棒性和准确性。关键词:点云骨架提取;曲率法线流;曲率;法线;骨架结构1.引言点云数据作为一种重要的三维数据表示形式,在计算机视觉、机器人学和地理信息系统等领域得到了广泛应用。

基于特征向量的点云配准方法研究.docx
基于特征向量的点云配准方法研究随着三维点云获取技术的不断发展,点云处理和分析在许多领域中担任着重要角色。点云配准是其中一项非常重要的任务,它涉及到将两个或多个点云之间的差异最小化的问题。在实际应用中,点云配准可以用于配准激光扫描仪和摄像机进行建模和测量,医学图像处理,地震勘探,机器人导航以及工业制造等领域。传统的点云配准方法大多基于特征点提取和匹配,例如SIFT、SURF等。尽管这些算法在某些情况下可以很好地解决问题,但在一些复杂情况下仍然存在一些缺陷。例如,对于低密度或缺乏特征的点云,这些方法往往表现不