
一种模块化关节以及七自由度模块化绳驱机械臂.pdf

宜欣****外呢


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种模块化关节以及七自由度模块化绳驱机械臂.pdf
本发明涉及一种模块化关节以及七自由度模块化绳驱机械臂,其模块化关节包括驱动电机,驱动电机带动减速机构,所述减速机构的输出轴穿过绳轮的中间孔带动所述绳轮转动,还带动所述绳轮上方设置的第一轴承的轴承内圈;设置第二轴承与所述第一轴承的轴线平行,第一、第二轴承的轴承外圈固定法兰之间固定连接、外圈轴承座固定连接;所述绳轮与所述第二轴承的内圈轴承座之间缠绕有驱动绳索。本发明的模块化关节中,驱动电机带动绳轮以及第一轴承运动,绳轮上的驱动绳索带动第二轴承转动,结构简单合理,并且具有一定在载荷能力;将模块化关节按一定方式布

一种七自由度协作机械臂用的模块化关节.pdf
本发明公开了一种七自由度协作机械臂用的模块化关节,包括外壳,外壳顶部安装有端盖,外壳内上部固定有金属支架,金属支架的顶面固定有伺服电机固定板,伺服电机固定板顶部固定有伺服电机,底壁固定失电制动器,电机齿轮凸台插在失电制动器转子凹槽内,电机齿轮套装固定在电机轴上,减速器固定在外壳底部,减速器波发生器上部固定有减速器齿轮,波发生器轴段上套有一底部密封圈,减速器柔轮底面开有多个连接另一模块化关节用的螺纹孔,减速器齿轮和电机齿轮彼此啮合配合;外壳的侧壁上设置有一凸台,开有阶梯孔,阶梯孔的轴线与减速器轴线共面并相互

一种机械臂模块化关节.pdf
本发明公开了一种用于机器人领域的机械臂模块化关节,该关节包括电机座、输入装置、输出装置、电机轴和中心孔走线线套;所述输入装置置于所述电机座内,包括:电机端盖,编码器磁环端盖、第一电机轴承、电机转子、电机、电机径向固定环、电机轴承轴向定位环、第二电机轴承、编码器处理电路板和编码器磁环;所述输出装置包括:第一输出轴承、输出调整环、输出内套筒、波发生器、输出密封轴承固定环、柔轮、第二输出轴承、输出法兰、输出外套筒、刚轮和输出外套筒锁紧环;所述输入装置和所述输出装置通过电机轴连接;所述波发生器、所述刚轮和所述柔轮
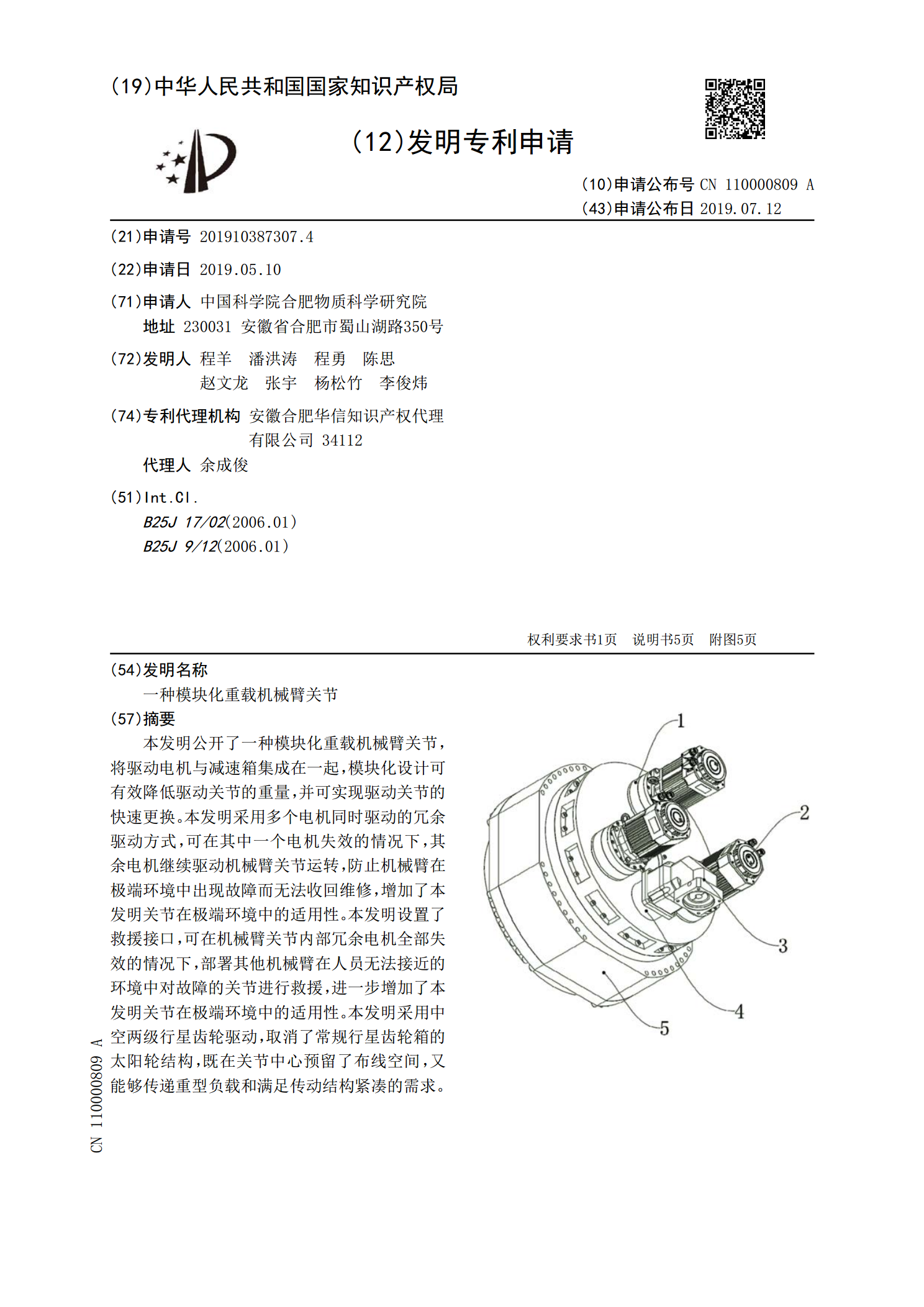
一种模块化重载机械臂关节.pdf
本发明公开了一种模块化重载机械臂关节,将驱动电机与减速箱集成在一起,模块化设计可有效降低驱动关节的重量,并可实现驱动关节的快速更换。本发明采用多个电机同时驱动的冗余驱动方式,可在其中一个电机失效的情况下,其余电机继续驱动机械臂关节运转,防止机械臂在极端环境中出现故障而无法收回维修,增加了本发明关节在极端环境中的适用性。本发明设置了救援接口,可在机械臂关节内部冗余电机全部失效的情况下,部署其他机械臂在人员无法接近的环境中对故障的关节进行救援,进一步增加了本发明关节在极端环境中的适用性。本发明采用中空两级行星
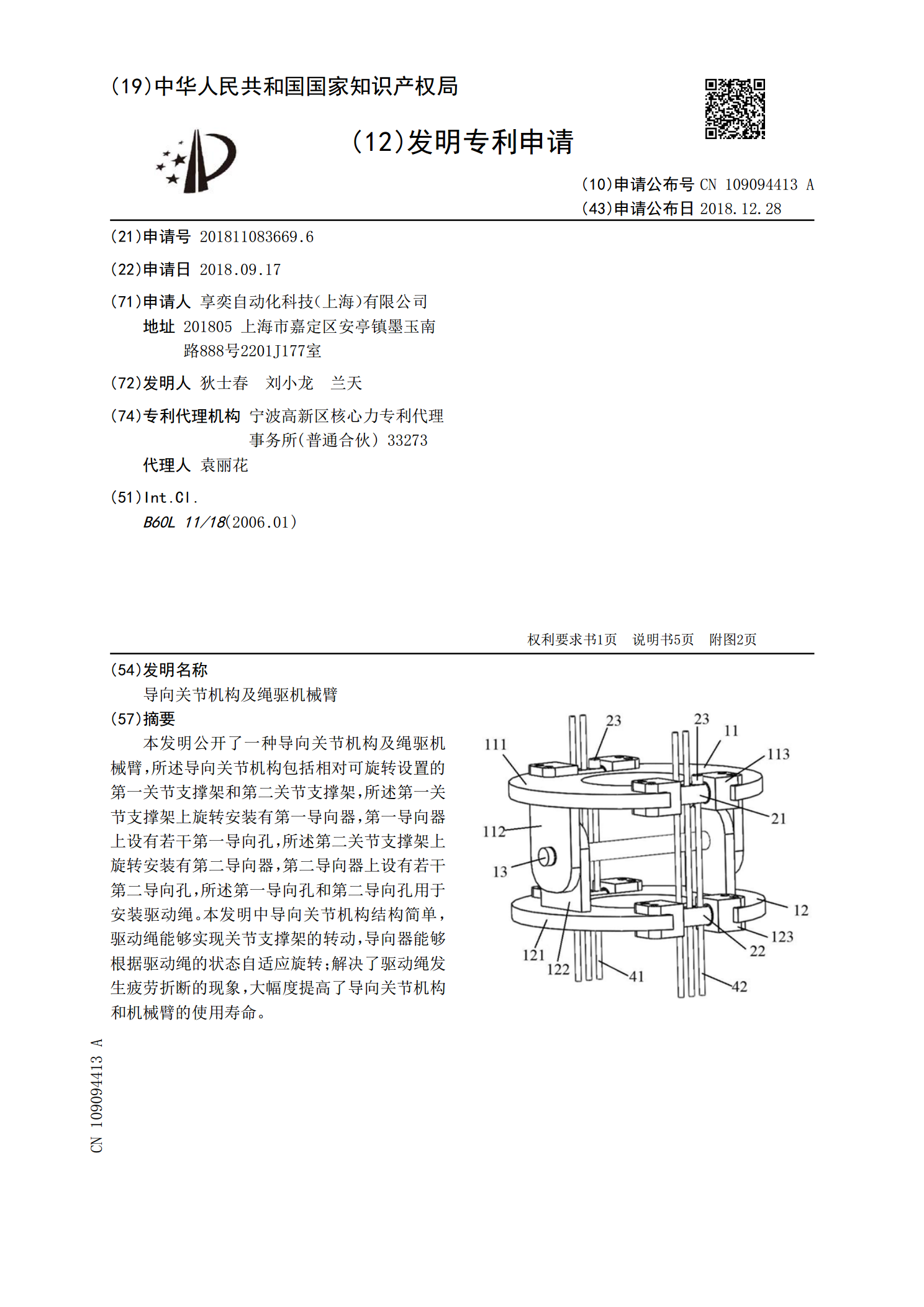
导向关节机构及绳驱机械臂.pdf
本发明公开了一种导向关节机构及绳驱机械臂,所述导向关节机构包括相对可旋转设置的第一关节支撑架和第二关节支撑架,所述第一关节支撑架上旋转安装有第一导向器,第一导向器上设有若干第一导向孔,所述第二关节支撑架上旋转安装有第二导向器,第二导向器上设有若干第二导向孔,所述第一导向孔和第二导向孔用于安装驱动绳。本发明中导向关节机构结构简单,驱动绳能够实现关节支撑架的转动,导向器能够根据驱动绳的状态自适应旋转;解决了驱动绳发生疲劳折断的现象,大幅度提高了导向关节机构和机械臂的使用寿命。