
一种高续航室内保洁智能机器人.pdf

一只****呀盟


1/10

2/10

3/10

4/10

5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种高续航室内保洁智能机器人.pdf
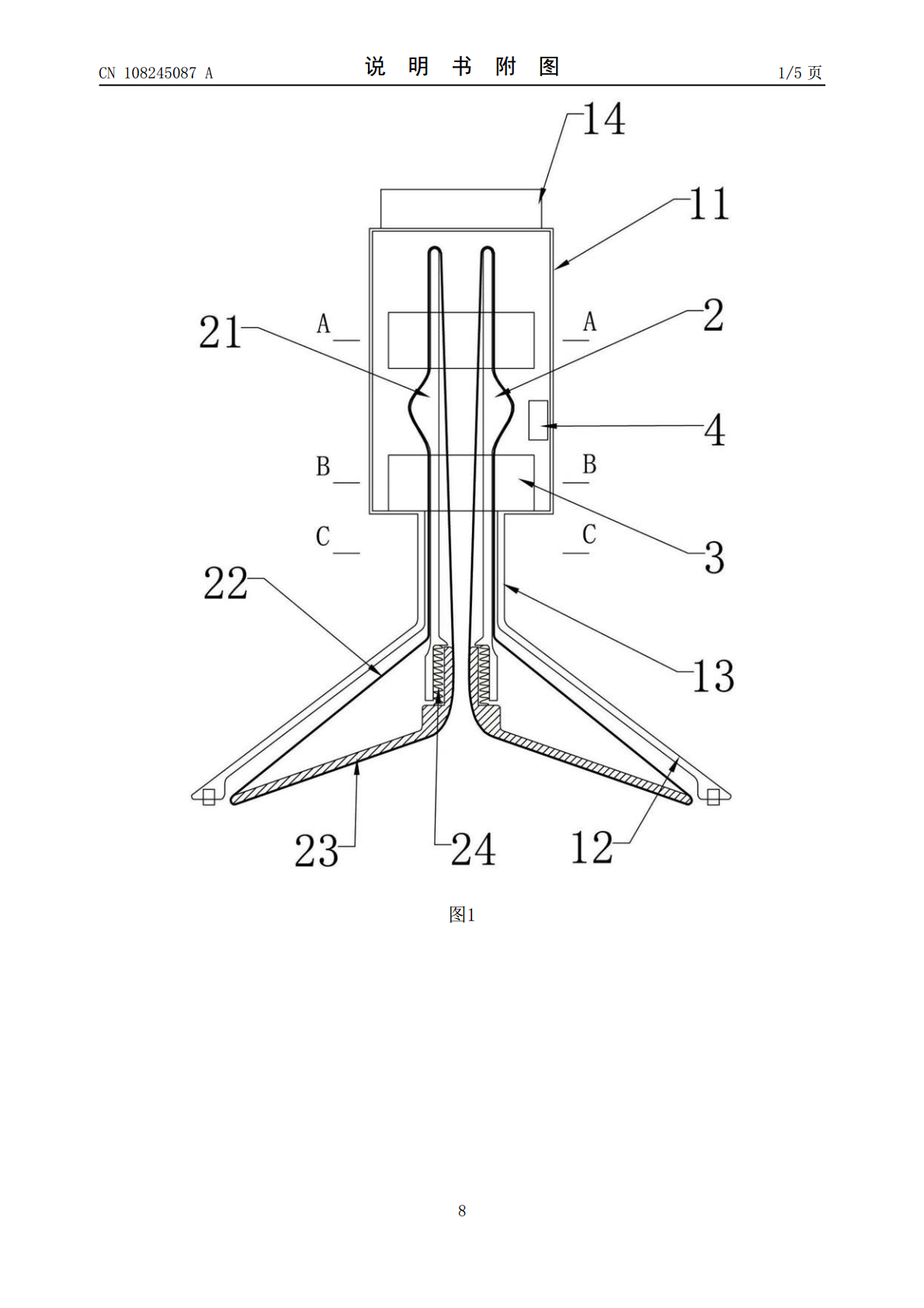
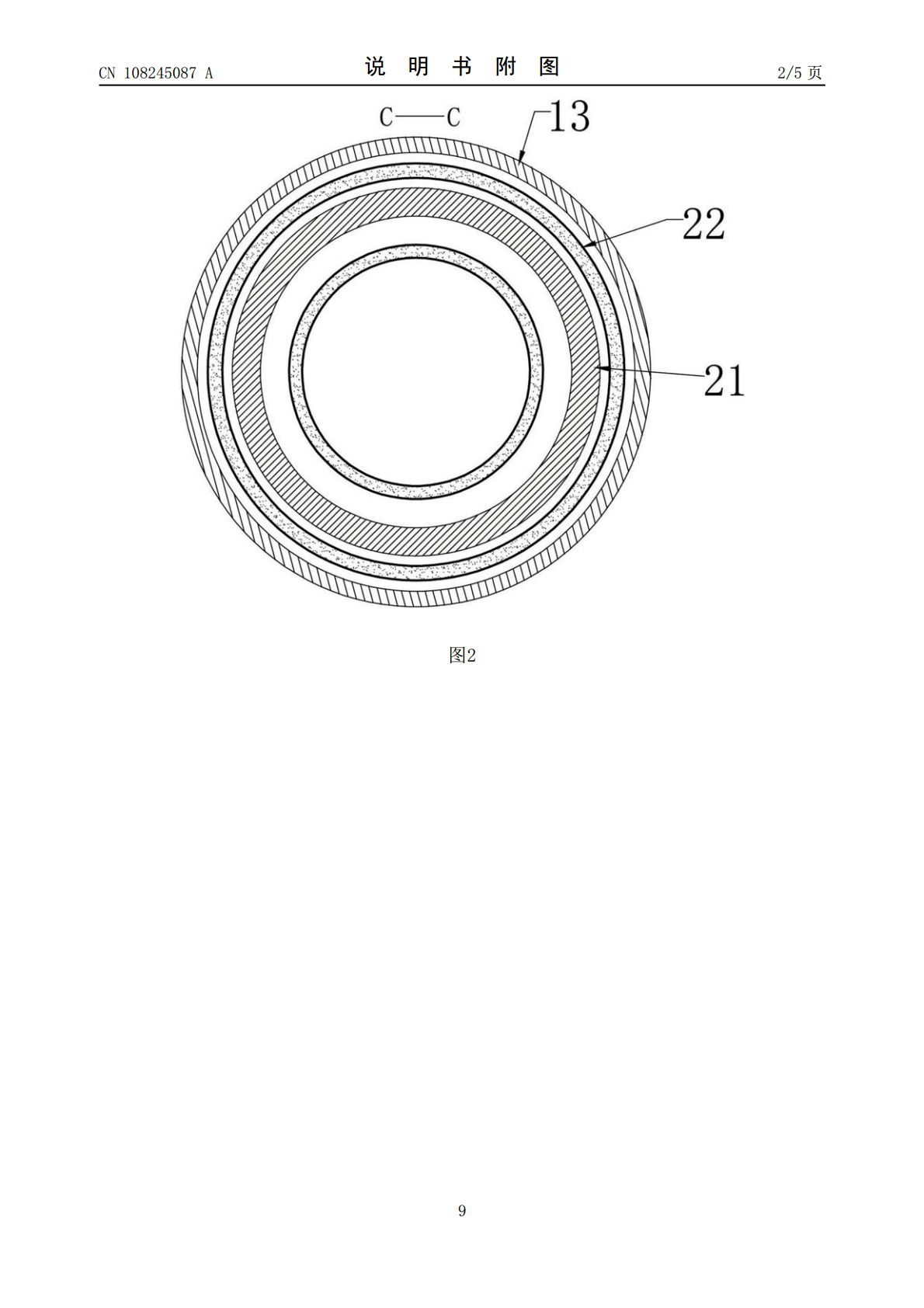
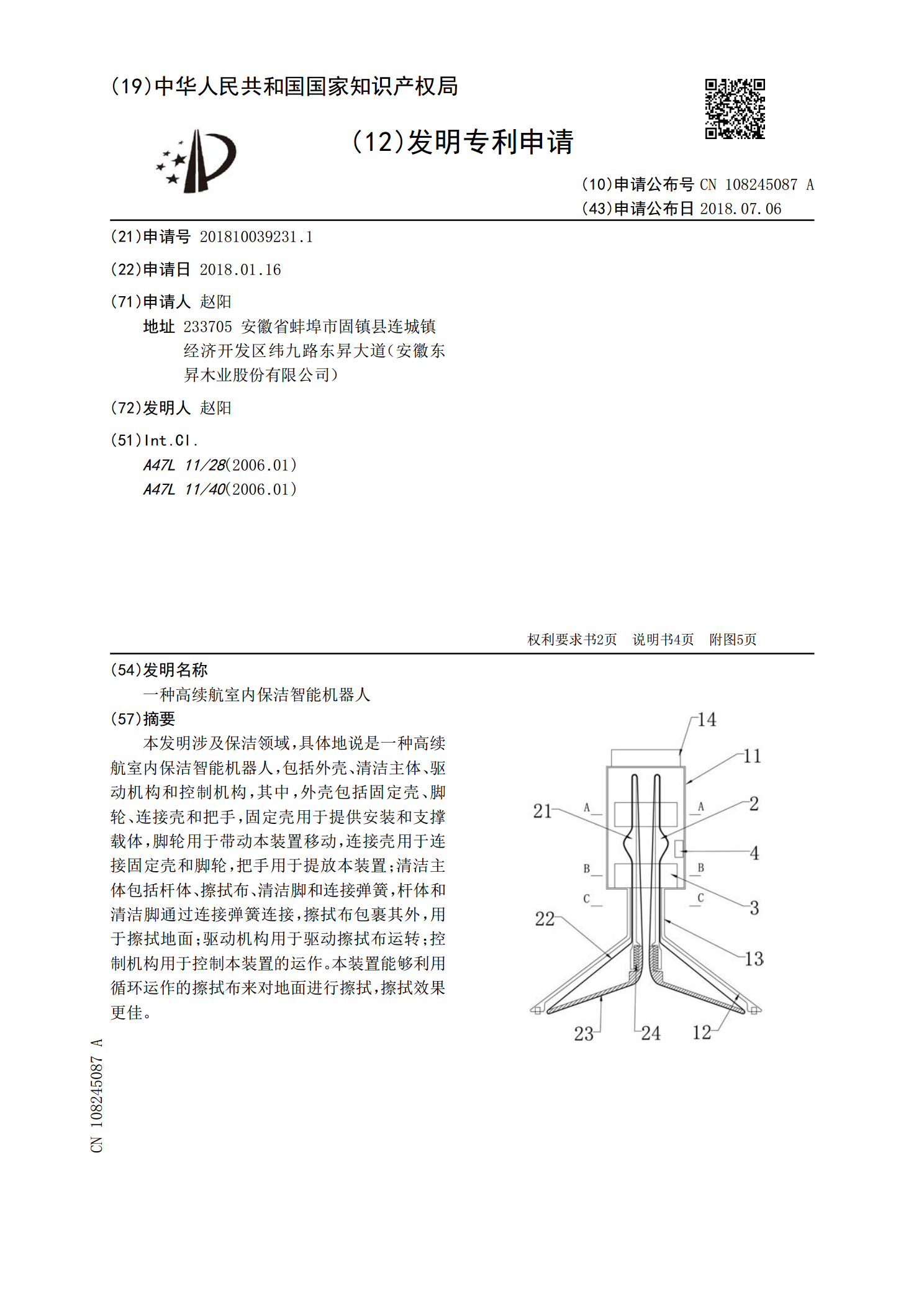
本发明涉及保洁领域,具体地说是一种高续航室内保洁智能机器人,包括外壳、清洁主体、驱动机构和控制机构,其中,外壳包括固定壳、脚轮、连接壳和把手,固定壳用于提供安装和支撑载体,脚轮用于带动本装置移动,连接壳用于连接固定壳和脚轮,把手用于提放本装置;清洁主体包括杆体、擦拭布、清洁脚和连接弹簧,杆体和清洁脚通过连接弹簧连接,擦拭布包裹其外,用于擦拭地面;驱动机构用于驱动擦拭布运转;控制机构用于控制本装置的运作。本装置能够利用循环运作的擦拭布来对地面进行擦拭,擦拭效果更佳。

一种室内智能保洁设备.pdf
本发明公开了一种室内智能保洁设备,包括清洁机器人,所述清洁机器人包括设有滚轮的底座,底座下方设有清洁装置,所述底座上方设有机柜,机柜顶部设有激光传感器和两个红外摄像仪,所述机柜内设有驱动装置和处理器,所述处理器包括驱动单元、存储单元、信号接收单元和信号处理单元,所述驱动单元与驱动装置相连,驱动装置驱动滚轮移动,所述信号接收单元分别与激光传感器和红外摄像仪相连,所述信号处理单元分别与信号接收单元和驱动单元相连,所述存储单元与信号处理单元相连,存储单元存储有室内地图信息。当室内物体位置发生改变后无需重新建立栅

一种智能保洁机器人.pdf
一种智能保洁机器人,包括:壳体、驱动轮、负压形成部、清洁部、垃圾箱、图像传感器、避障传感器、机械爪、电源和控制部。本发明提供的智能保洁机器人,自动化和智能化程度高,可以完成大面积路面或广场等地面与其它平台上的垃圾清扫,且可以完成垃圾识别与分类处理工作。

一种具有高续航能力的智能化无人机.pdf
本发明涉及一种具有高续航能力的智能化无人机,包括机身、控制电路、飞行机构和风力发电机构,飞行机构包括若干个飞行组件,风力发电机构包括驱动组件、发电组件和升降组件,驱动组件包括转轴、轴套、连接盘、支撑架和叶片,发电组件包括第一齿轮、第二齿轮、齿轮箱和发电机,升降组件包括套杆、丝杠和升降电机。该具有高续航能力的智能化无人机结构精巧,特有的风力发电机构在其飞行时能够利用高空的风能进行发电,极大地提高了续航能力。风力发电机构中特有的升降组件能调节风力发电机构的整体高度,使该风力发电机构不会影响无人机的飞行。另外,

一种长续航高承载环保智能型电动车.pdf
本发明公开了一种长续航高承载环保智能型电动车,包括车架、车轮、轮轴、传动装置和电控系统,所述电控系统设置在所述车架内部前方位置,所述电控系统上安装有方向盘,所述方向盘通过所述传动装置与设置在车架底部的轮轴相连,所述轮轴的两端安装有所述车轮,所述车架内部设置有多排座椅,该种长续航高承载环保智能型电动车,设计合理,可以在下雨的时候及时将设置在车架上方的防水膜落下,避免雨水打湿电动观光车的内部,并且可以将雨水进行收集并过滤,将雨水储存在水箱内,在雨停之后,利用水泵和管接头连接水枪,及时对电动观光车进行清洗,节约