
管道机器人自动巡检清淤装置及清淤方法.pdf

运升****魔王

1/10
2/10

3/10

4/10
5/10
6/10

7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
管道机器人自动巡检清淤装置及清淤方法.pdf
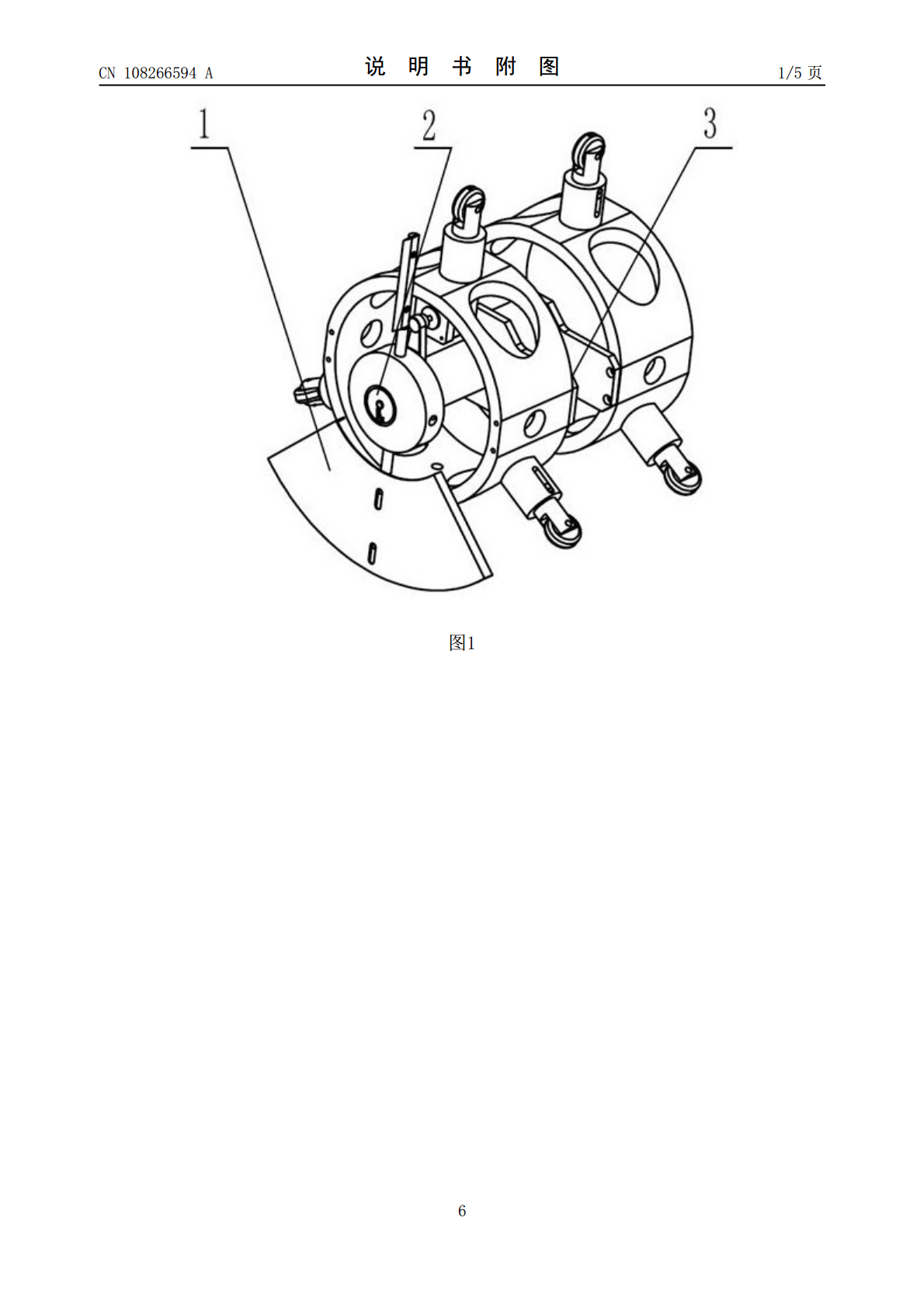
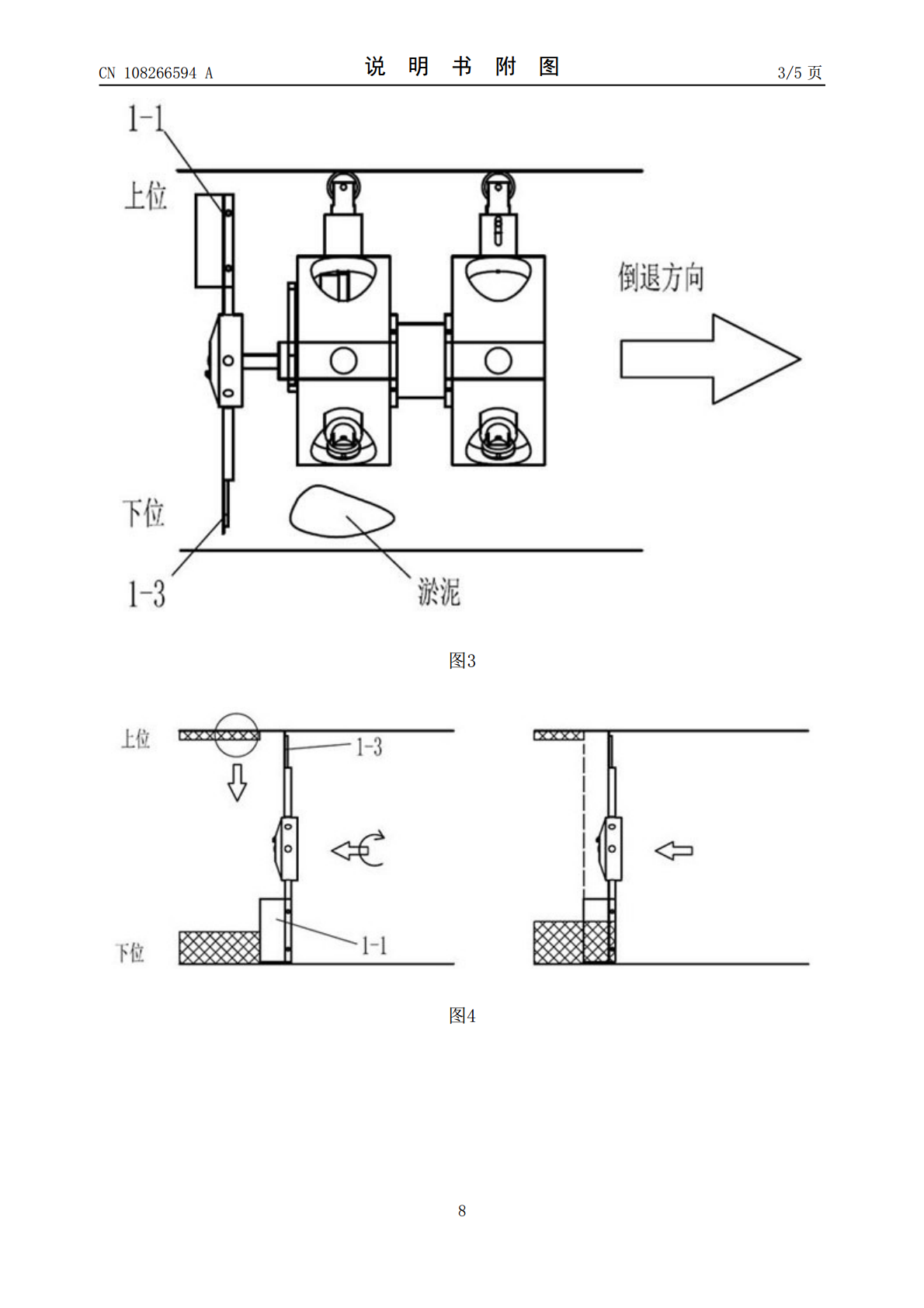
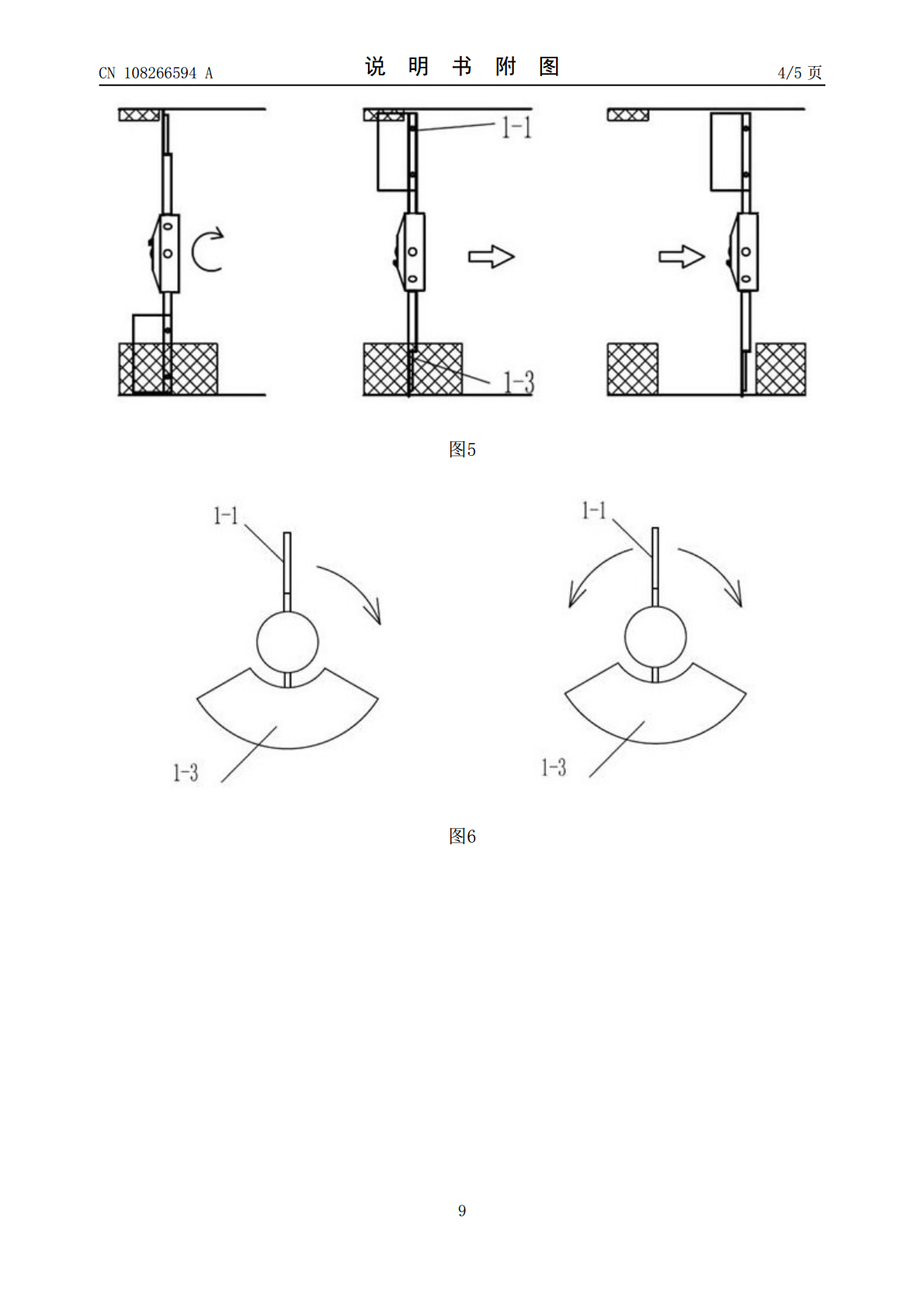
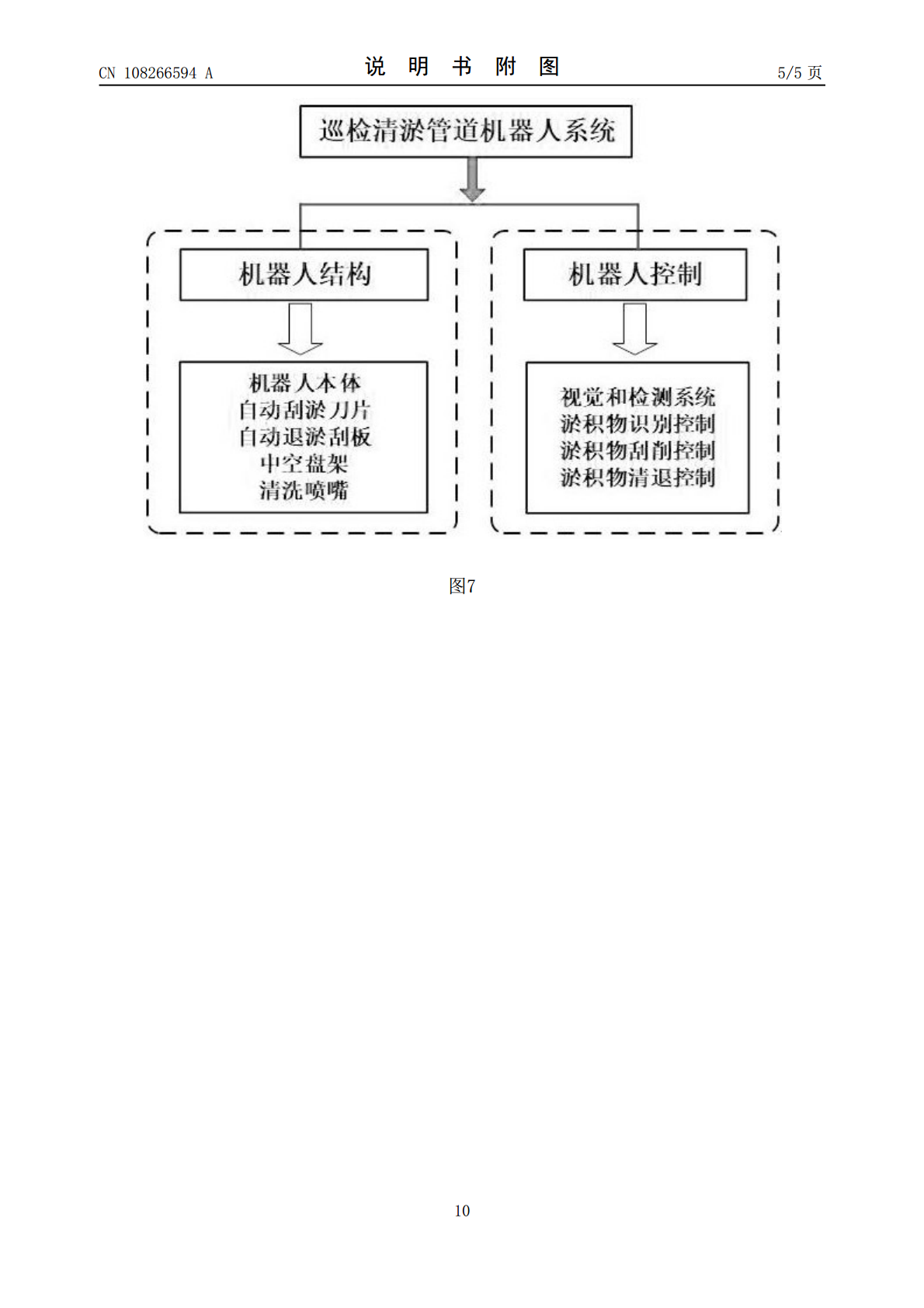
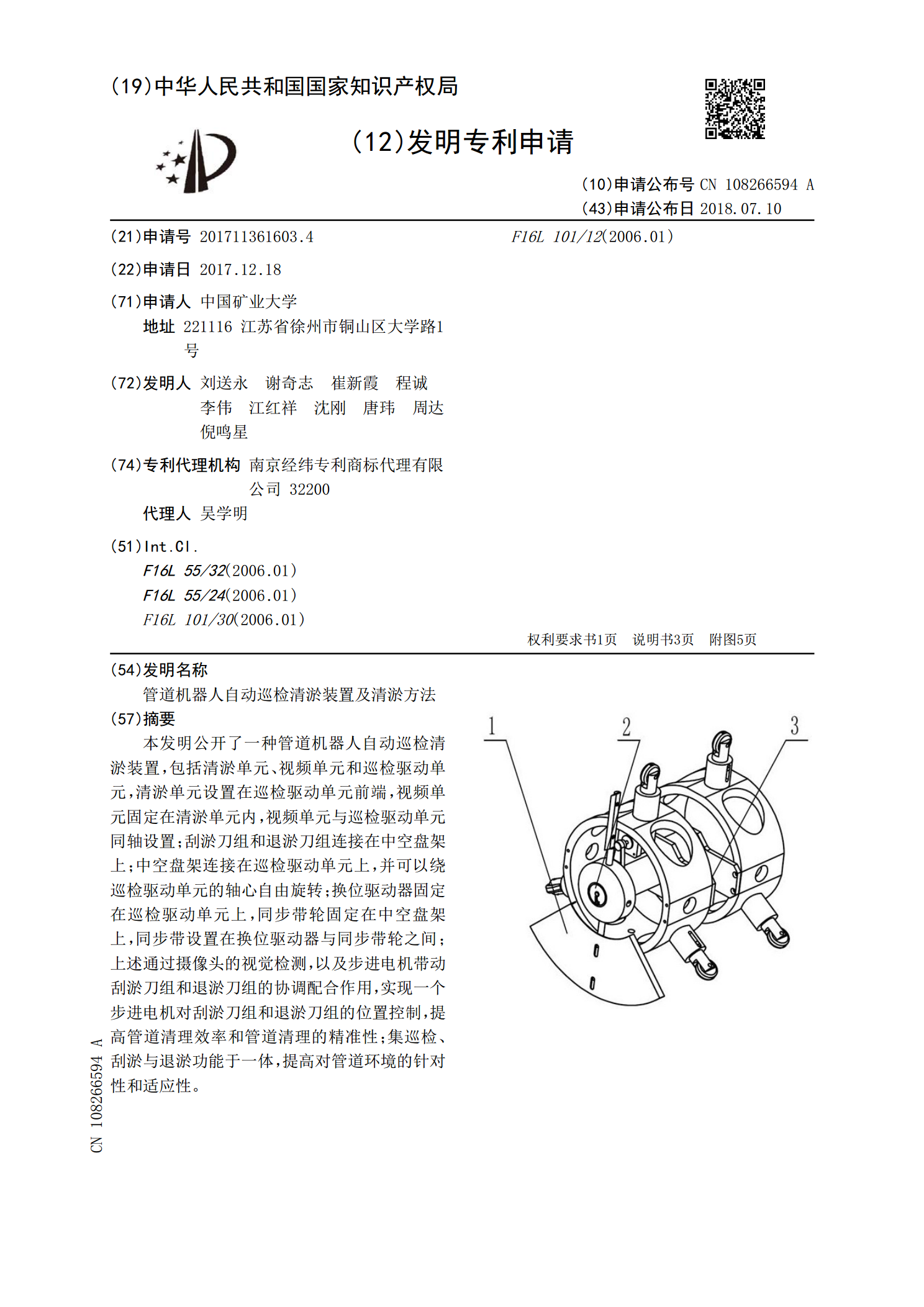
本发明公开了一种管道机器人自动巡检清淤装置,包括清淤单元、视频单元和巡检驱动单元,清淤单元设置在巡检驱动单元前端,视频单元固定在清淤单元内,视频单元与巡检驱动单元同轴设置;刮淤刀组和退淤刀组连接在中空盘架上;中空盘架连接在巡检驱动单元上,并可以绕巡检驱动单元的轴心自由旋转;换位驱动器固定在巡检驱动单元上,同步带轮固定在中空盘架上,同步带设置在换位驱动器与同步带轮之间;上述通过摄像头的视觉检测,以及步进电机带动刮淤刀组和退淤刀组的协调配合作用,实现一个步进电机对刮淤刀组和退淤刀组的位置控制,提高管道清理效率

管道清淤机器人.pdf
本发明提供了一种管道清淤机器人,包括清淤小车和控制主机,所述的清淤小车包括内部装有驱动电机的车体,车体前端装有与驱动电机连接的清淤旋刀以及LED灯、摄像头和喷水系统,车体底部装有与驱动电机连接的驱动轮,车体顶部装有顶压滚轮;所述的控制主机包括控制箱、带高压水泵的水箱和蓄电池,其中,控制箱与清淤小车上的航空插头连接,带高压水泵的水箱与清淤小车上的喷水系统连接。本发明能够在电缆管道内自由行走并通过高压水枪喷头及高强度粉碎装置将电缆管道内的淤泥、杂物粉碎后通过小型水泵抽出电缆管道,达到疏通电缆管道的目的,保障电
管道清淤机器人.pdf
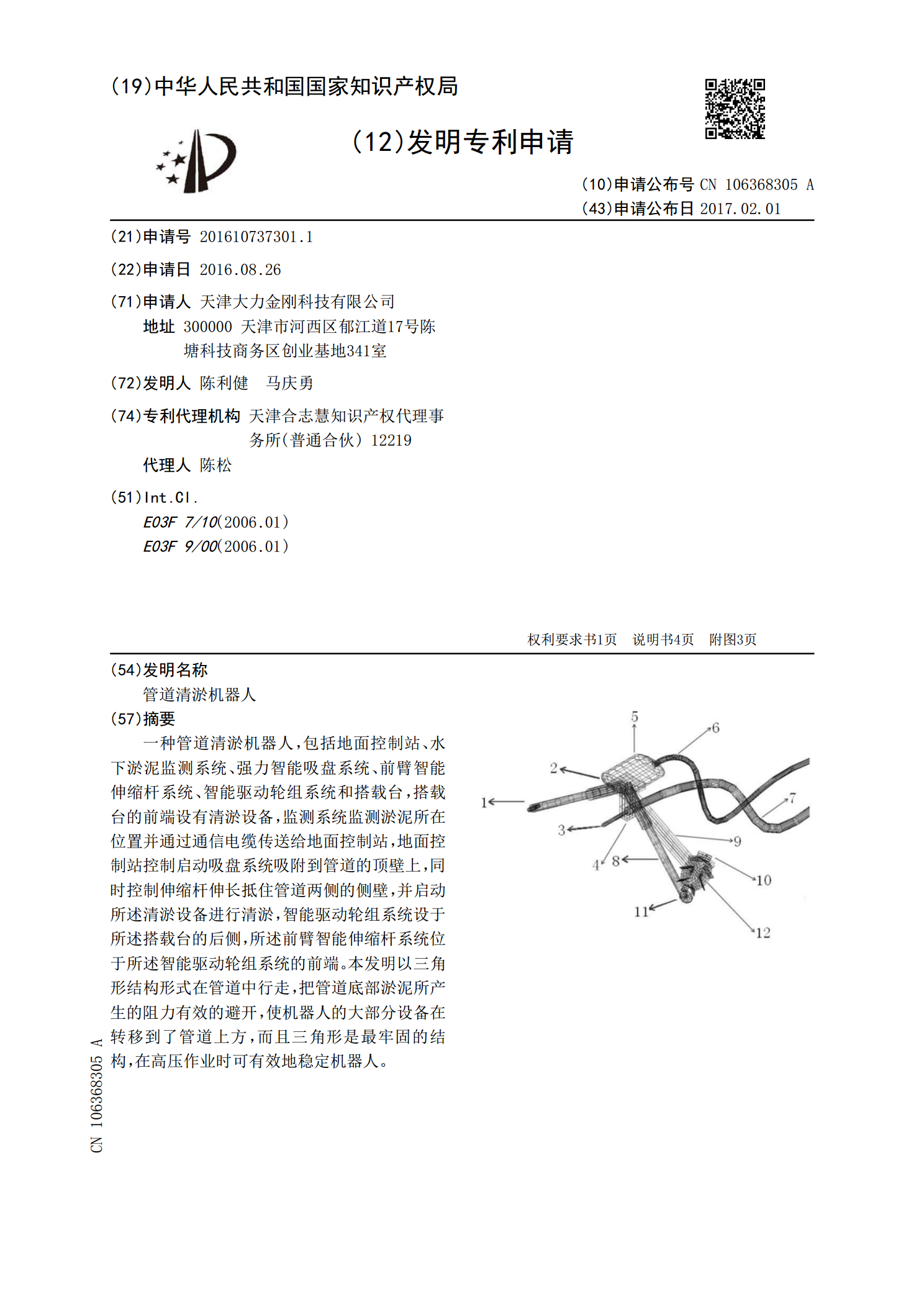
一种管道清淤机器人,包括地面控制站、水下淤泥监测系统、强力智能吸盘系统、前臂智能伸缩杆系统、智能驱动轮组系统和搭载台,搭载台的前端设有清淤设备,监测系统监测淤泥所在位置并通过通信电缆传送给地面控制站,地面控制站控制启动吸盘系统吸附到管道的顶壁上,同时控制伸缩杆伸长抵住管道两侧的侧壁,并启动所述清淤设备进行清淤,智能驱动轮组系统设于所述搭载台的后侧,所述前臂智能伸缩杆系统位于所述智能驱动轮组系统的前端。本发明以三角形结构形式在管道中行走,把管道底部淤泥所产生的阻力有效的避开,使机器人的大部分设备在转移到了管
管道清淤机器人的变速切割装置.pdf
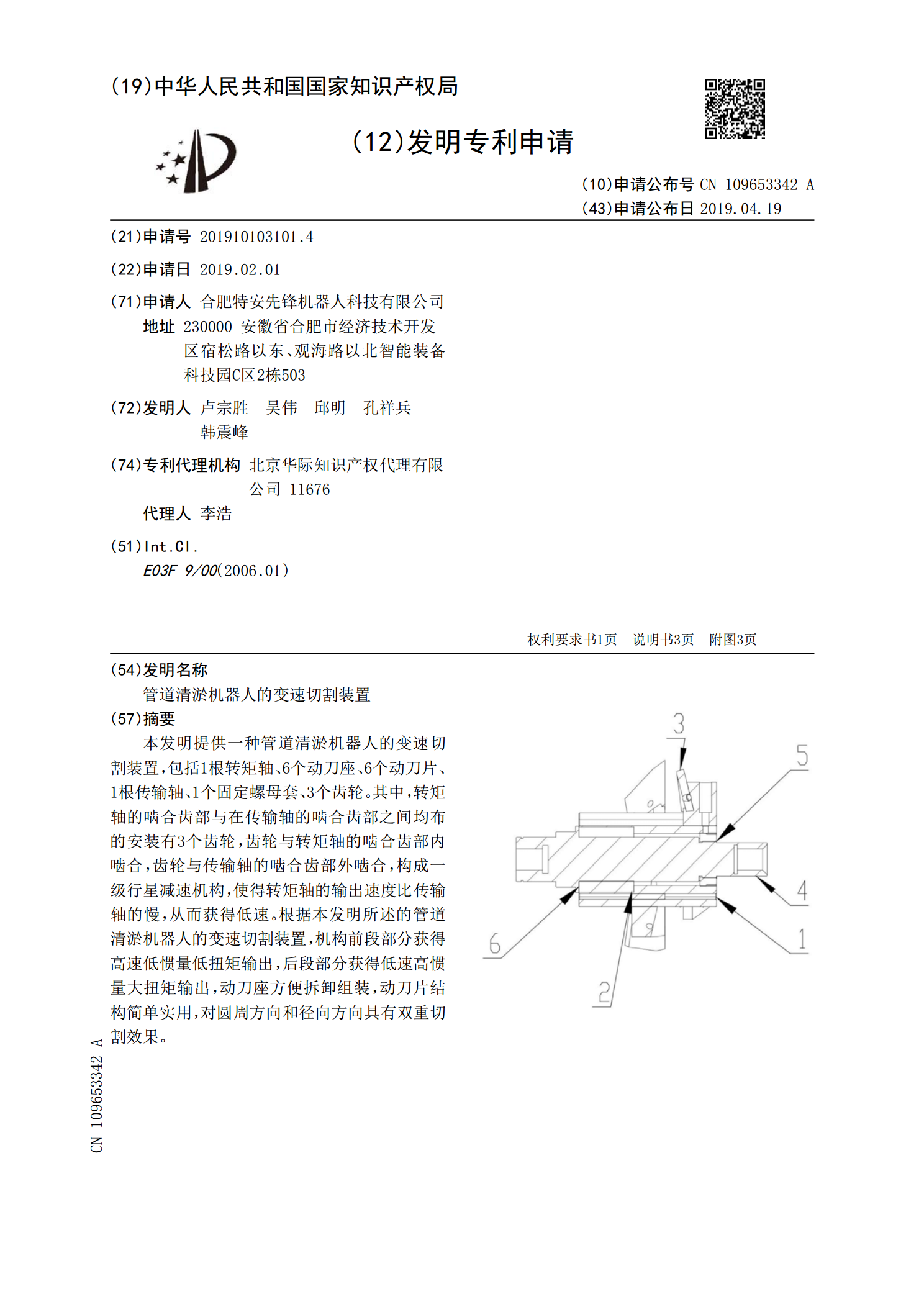
本发明提供一种管道清淤机器人的变速切割装置,包括1根转矩轴、6个动刀座、6个动刀片、1根传输轴、1个固定螺母套、3个齿轮。其中,转矩轴的啮合齿部与在传输轴的啮合齿部之间均布的安装有3个齿轮,齿轮与转矩轴的啮合齿部内啮合,齿轮与传输轴的啮合齿部外啮合,构成一级行星减速机构,使得转矩轴的输出速度比传输轴的慢,从而获得低速。根据本发明所述的管道清淤机器人的变速切割装置,机构前段部分获得高速低惯量低扭矩输出,后段部分获得低速高惯量大扭矩输出,动刀座方便拆卸组装,动刀片结构简单实用,对圆周方向和径向方向具有双重切割

一种管道清淤机器人装置及其控制方法.pdf
本发明公开了一种管道清淤机器人装置及其控制方法,包括底座、传动组件和清淤组件;所述清淤组件由挂座、机械臂和机械爪组成,挂座的空腔内安装有锂电池、驱动转换器、超声波测距仪、无线收发装置和电路板,电路板上焊接有电性元器件,各元件之间相互电路连接;所述传动组件由伺服电机、步进电机、伸缩杆和丝杆组成,伸缩杆穿过滑座,通过在底座内部安装的齿轮与步进电机传动连接,伸缩杆和丝杆连接的滑座的背面焊接有轴,并通过在轴上套接的齿轮与伺服电机传动连接。本发明通过简单的传动组件和清淤组件的设置,将其固定在底座上,占用空间小,手持