
一种管道清淤机器人装置及其控制方法.pdf

朋兴****en


1/10
2/10

3/10

4/10
5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种管道清淤机器人装置及其控制方法.pdf
本发明公开了一种管道清淤机器人装置及其控制方法,包括底座、传动组件和清淤组件;所述清淤组件由挂座、机械臂和机械爪组成,挂座的空腔内安装有锂电池、驱动转换器、超声波测距仪、无线收发装置和电路板,电路板上焊接有电性元器件,各元件之间相互电路连接;所述传动组件由伺服电机、步进电机、伸缩杆和丝杆组成,伸缩杆穿过滑座,通过在底座内部安装的齿轮与步进电机传动连接,伸缩杆和丝杆连接的滑座的背面焊接有轴,并通过在轴上套接的齿轮与伺服电机传动连接。本发明通过简单的传动组件和清淤组件的设置,将其固定在底座上,占用空间小,手持
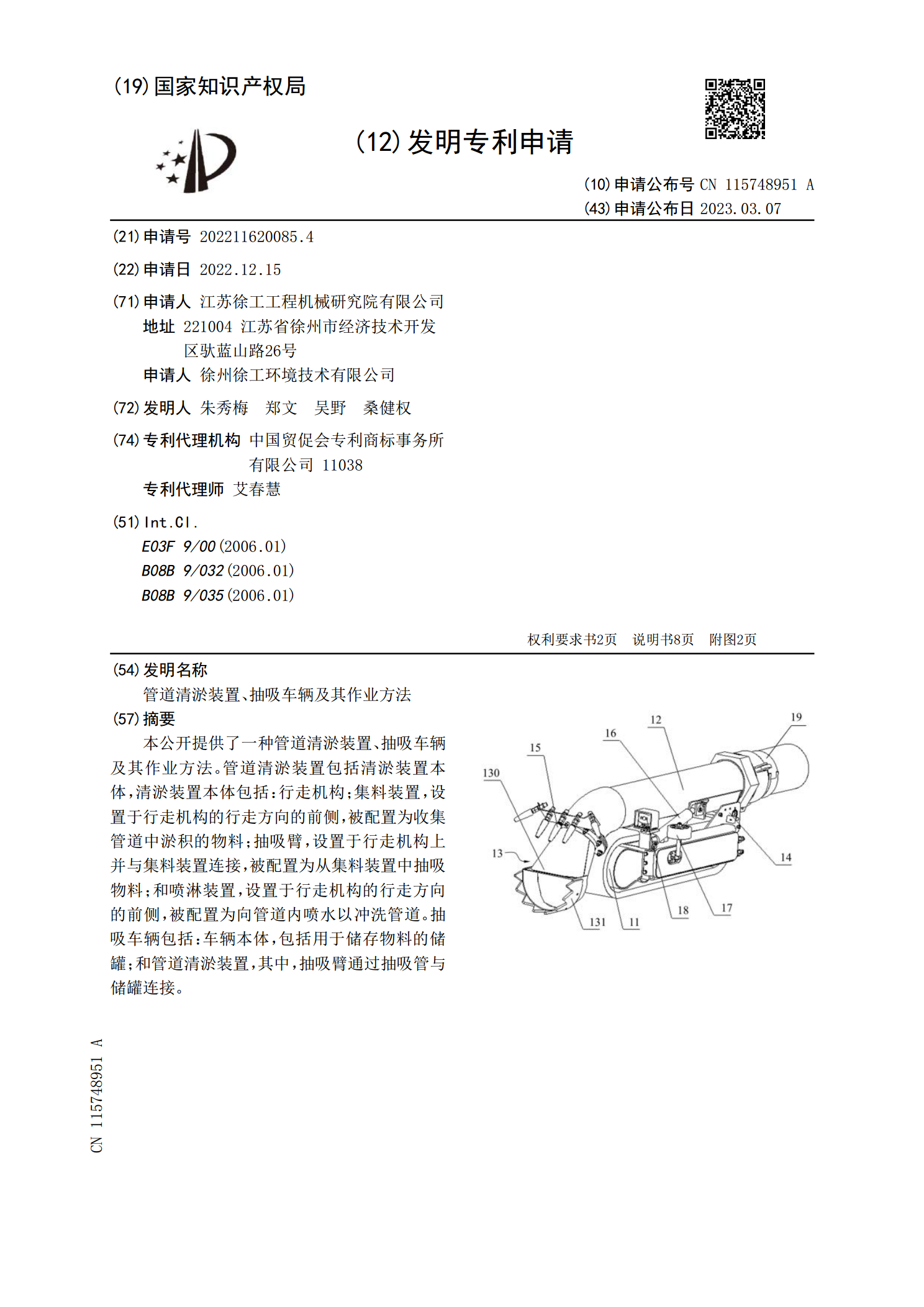
管道清淤装置、抽吸车辆及其作业方法.pdf
本公开提供了一种管道清淤装置、抽吸车辆及其作业方法。管道清淤装置包括清淤装置本体,清淤装置本体包括:行走机构;集料装置,设置于行走机构的行走方向的前侧,被配置为收集管道中淤积的物料;抽吸臂,设置于行走机构上并与集料装置连接,被配置为从集料装置中抽吸物料;和喷淋装置,设置于行走机构的行走方向的前侧,被配置为向管道内喷水以冲洗管道。抽吸车辆包括:车辆本体,包括用于储存物料的储罐;和管道清淤装置,其中,抽吸臂通过抽吸管与储罐连接。
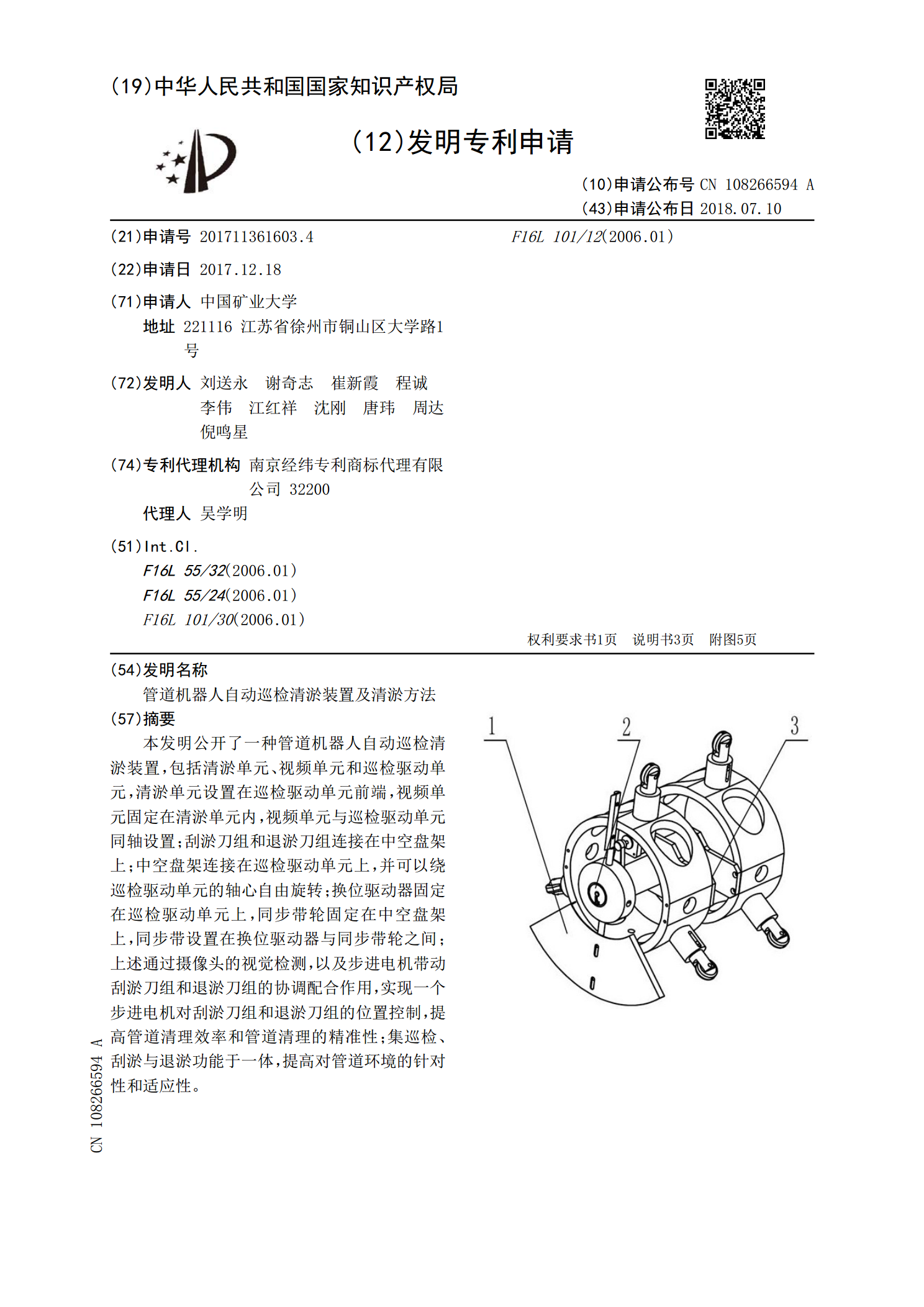
管道机器人自动巡检清淤装置及清淤方法.pdf
本发明公开了一种管道机器人自动巡检清淤装置,包括清淤单元、视频单元和巡检驱动单元,清淤单元设置在巡检驱动单元前端,视频单元固定在清淤单元内,视频单元与巡检驱动单元同轴设置;刮淤刀组和退淤刀组连接在中空盘架上;中空盘架连接在巡检驱动单元上,并可以绕巡检驱动单元的轴心自由旋转;换位驱动器固定在巡检驱动单元上,同步带轮固定在中空盘架上,同步带设置在换位驱动器与同步带轮之间;上述通过摄像头的视觉检测,以及步进电机带动刮淤刀组和退淤刀组的协调配合作用,实现一个步进电机对刮淤刀组和退淤刀组的位置控制,提高管道清理效率

一种市政管道清淤装置及其使用方法.pdf
本发明涉及管道清淤技术领域,且公开了一种市政管道清淤装置及其使用方法,其中的一种市政管道清淤装置包括箱体,所述箱体的底部转动安装有两个第一转轴,两个第一转轴的外侧均固定安装有两个滚轮,箱体内固定安装有水箱,箱体的顶部固定安装有水泵,水泵的底部与一侧分别固定安装有水管与软管的一端,水管的另一端延伸至水箱内,软管的另一端固定连通有喷头,水箱的一侧固定安装有电机,电机的输出轴上固定连接有第二转轴的一端。本发明结构设计合理巧妙,可以有效地对市政管道内的淤泥进行稀释处理,使得淤泥可以自行流通,使用方便,提高了清淤的
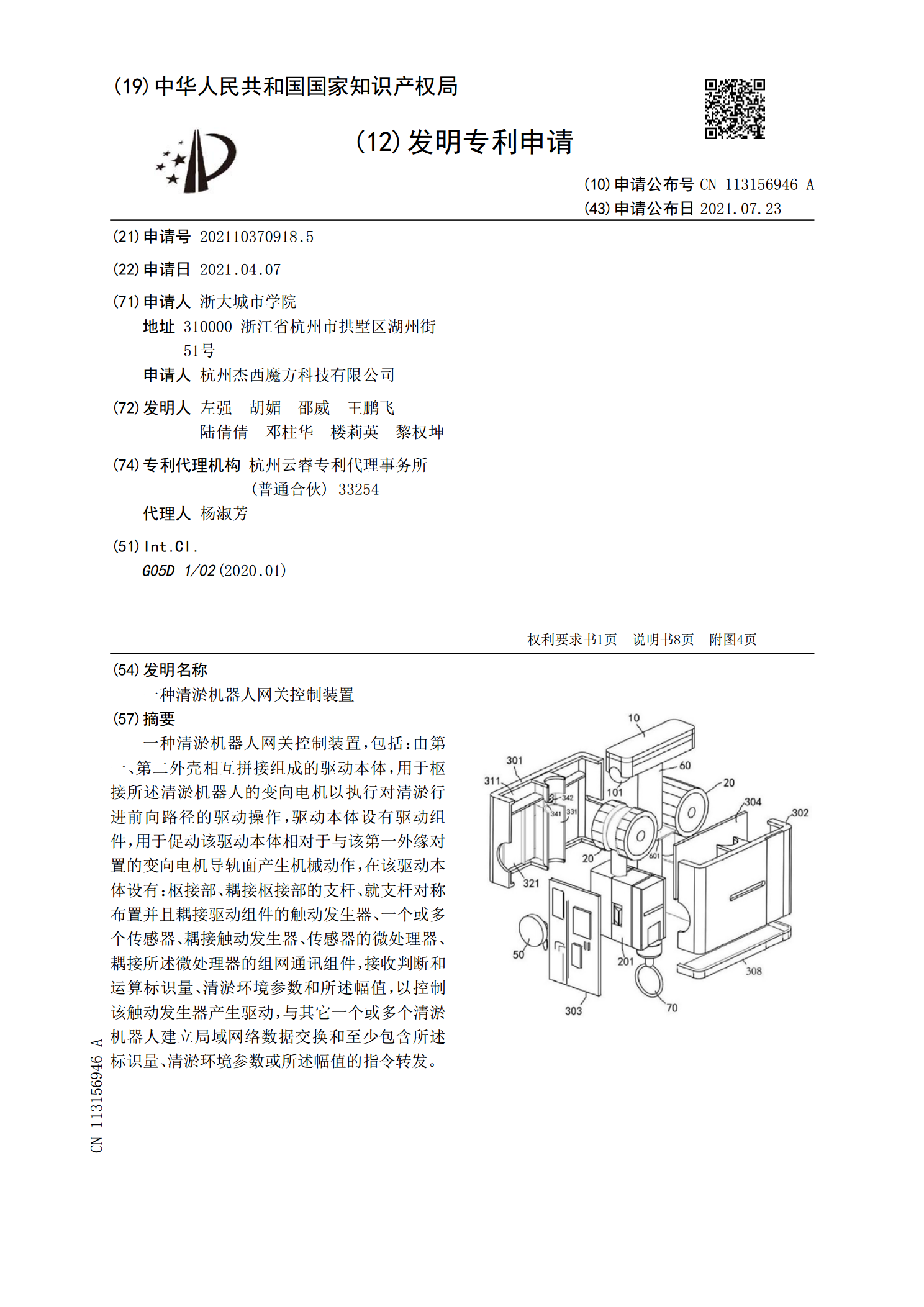
一种清淤机器人网关控制装置.pdf
一种清淤机器人网关控制装置,包括:由第一、第二外壳相互拼接组成的驱动本体,用于枢接所述清淤机器人的变向电机以执行对清淤行进前向路径的驱动操作,驱动本体设有驱动组件,用于促动该驱动本体相对于与该第一外缘对置的变向电机导轨面产生机械动作,在该驱动本体设有:枢接部、耦接枢接部的支杆、就支杆对称布置并且耦接驱动组件的触动发生器、一个或多个传感器、耦接触动发生器、传感器的微处理器、耦接所述微处理器的组网通讯组件,接收判断和运算标识量、清淤环境参数和所述幅值,以控制该触动发生器产生驱动,与其它一个或多个清淤机器人建立