
管道清淤机器人.pdf

觅松****哥哥


1/9

2/9

3/9
4/9

5/9

6/9
7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

管道清淤机器人.pdf
本发明提供了一种管道清淤机器人,包括清淤小车和控制主机,所述的清淤小车包括内部装有驱动电机的车体,车体前端装有与驱动电机连接的清淤旋刀以及LED灯、摄像头和喷水系统,车体底部装有与驱动电机连接的驱动轮,车体顶部装有顶压滚轮;所述的控制主机包括控制箱、带高压水泵的水箱和蓄电池,其中,控制箱与清淤小车上的航空插头连接,带高压水泵的水箱与清淤小车上的喷水系统连接。本发明能够在电缆管道内自由行走并通过高压水枪喷头及高强度粉碎装置将电缆管道内的淤泥、杂物粉碎后通过小型水泵抽出电缆管道,达到疏通电缆管道的目的,保障电
管道清淤机器人.pdf
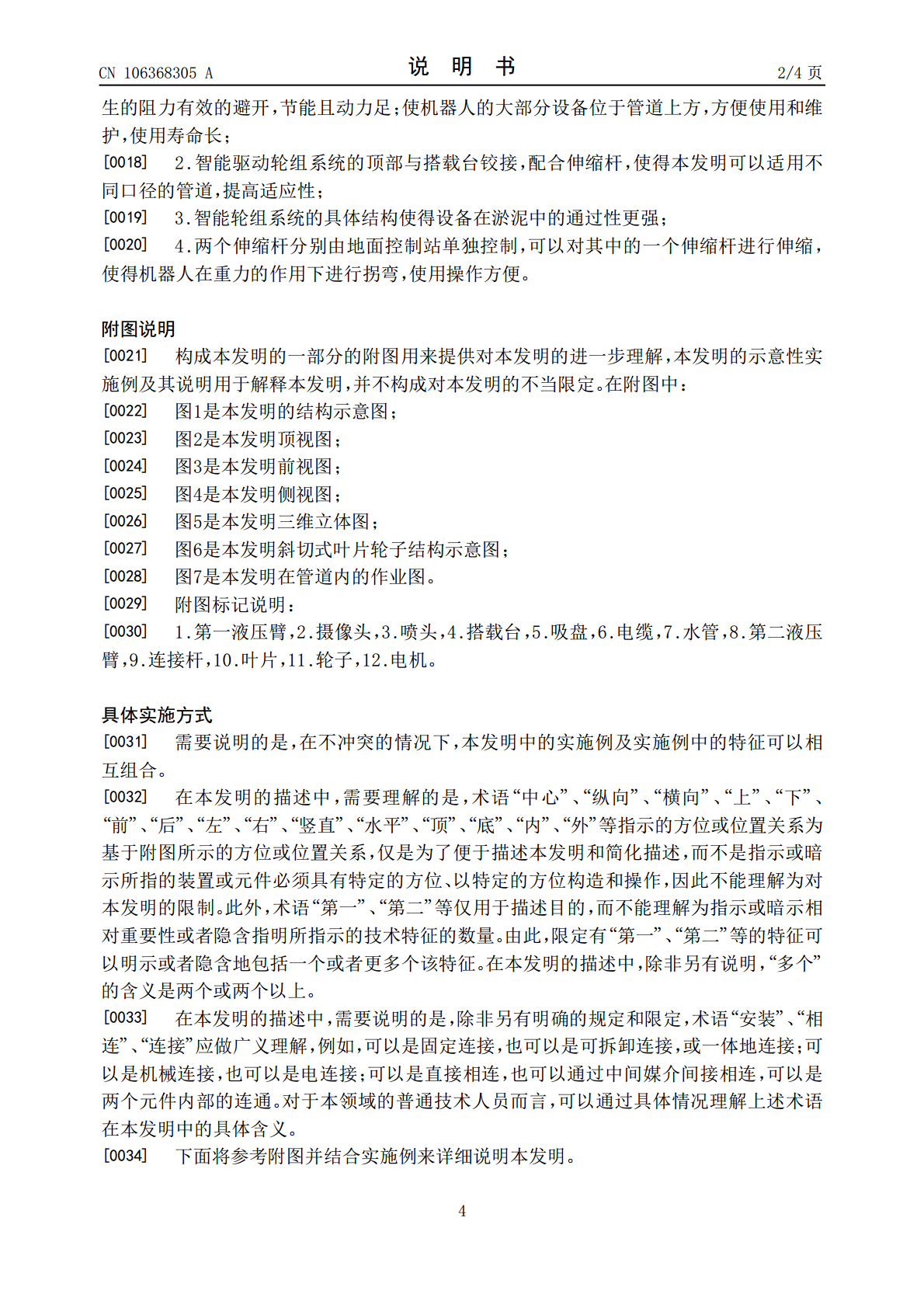
一种管道清淤机器人,包括地面控制站、水下淤泥监测系统、强力智能吸盘系统、前臂智能伸缩杆系统、智能驱动轮组系统和搭载台,搭载台的前端设有清淤设备,监测系统监测淤泥所在位置并通过通信电缆传送给地面控制站,地面控制站控制启动吸盘系统吸附到管道的顶壁上,同时控制伸缩杆伸长抵住管道两侧的侧壁,并启动所述清淤设备进行清淤,智能驱动轮组系统设于所述搭载台的后侧,所述前臂智能伸缩杆系统位于所述智能驱动轮组系统的前端。本发明以三角形结构形式在管道中行走,把管道底部淤泥所产生的阻力有效的避开,使机器人的大部分设备在转移到了管

一种管道清淤机器人.pdf
本发明公开一种管道清淤机器人,包括清理作业单元、六个贴壁角度调整步进电机、六个贴壁爬升步进电机、驱动机架单元、清淤机构步进电机等,其特征在于三组沿径向且两两间距一百二十度地固定安装在所述的驱动机架单元上托盘上,沿另外三组沿径向且两两间距一百二十度地固定在驱动机架单元下托盘上,且恰好与前三组两两间距三十度,所述的清淤机构步进电机固定安装在驱动机架单元上,其轴上齿轮与清理作业单元的转动空心轴啮合,所述的清理作业单元固定在驱动机架单元上端中心;本发明在清淤的基础上增加了白色垃圾收集功能,解决管道堵塞问题,防止清

一种管道清淤机器人.pdf
本发明公开了管道清理技术领域的一种管道清淤机器人,具有壳体、滚轮、驱动轴、电机和连接法兰,所述壳体外壁固定连接有电机,且壳体侧壁嵌入有所述连接法兰,所述电机的输出端连接驱动轴,所述驱动轴的两端连接滚轮,所述套壳一端与所述连接柱一端固定连接,且套壳另一端安装有所述第一步进电机,所述安装座上固定连接有与所述套壳平行的所述照明电筒,所述照明电筒一端下方安装有所述摄像头,所述连接柱另一端固定连接所述清淤箱,所述清淤腔内腔安装有所述排污泵,本发明将堵塞物破碎并排出,防止堵塞物的二次堵塞,同时能在清淤过程中保持机器人
一种管道清淤机器人.pdf
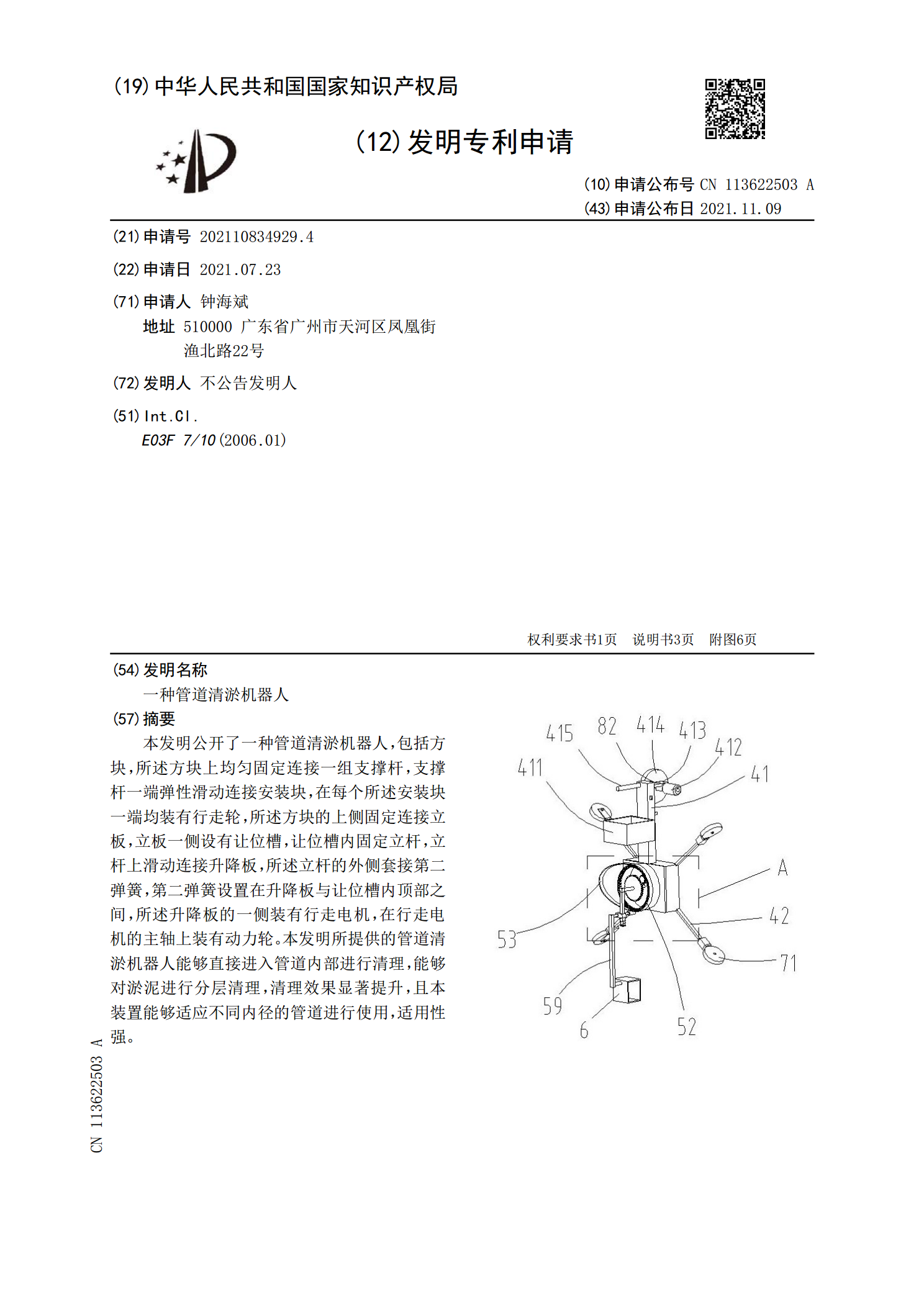
本发明公开了一种管道清淤机器人,包括方块,所述方块上均匀固定连接一组支撑杆,支撑杆一端弹性滑动连接安装块,在每个所述安装块一端均装有行走轮,所述方块的上侧固定连接立板,立板一侧设有让位槽,让位槽内固定立杆,立杆上滑动连接升降板,所述立杆的外侧套接第二弹簧,第二弹簧设置在升降板与让位槽内顶部之间,所述升降板的一侧装有行走电机,在行走电机的主轴上装有动力轮。本发明所提供的管道清淤机器人能够直接进入管道内部进行清理,能够对淤泥进行分层清理,清理效果显著提升,且本装置能够适应不同内径的管道进行使用,适用性强。