
一种基于车速分区的馈能悬架及其阻尼切换控制方法.pdf

努力****向丝


1/10

2/10

3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于车速分区的馈能悬架及其阻尼切换控制方法.pdf
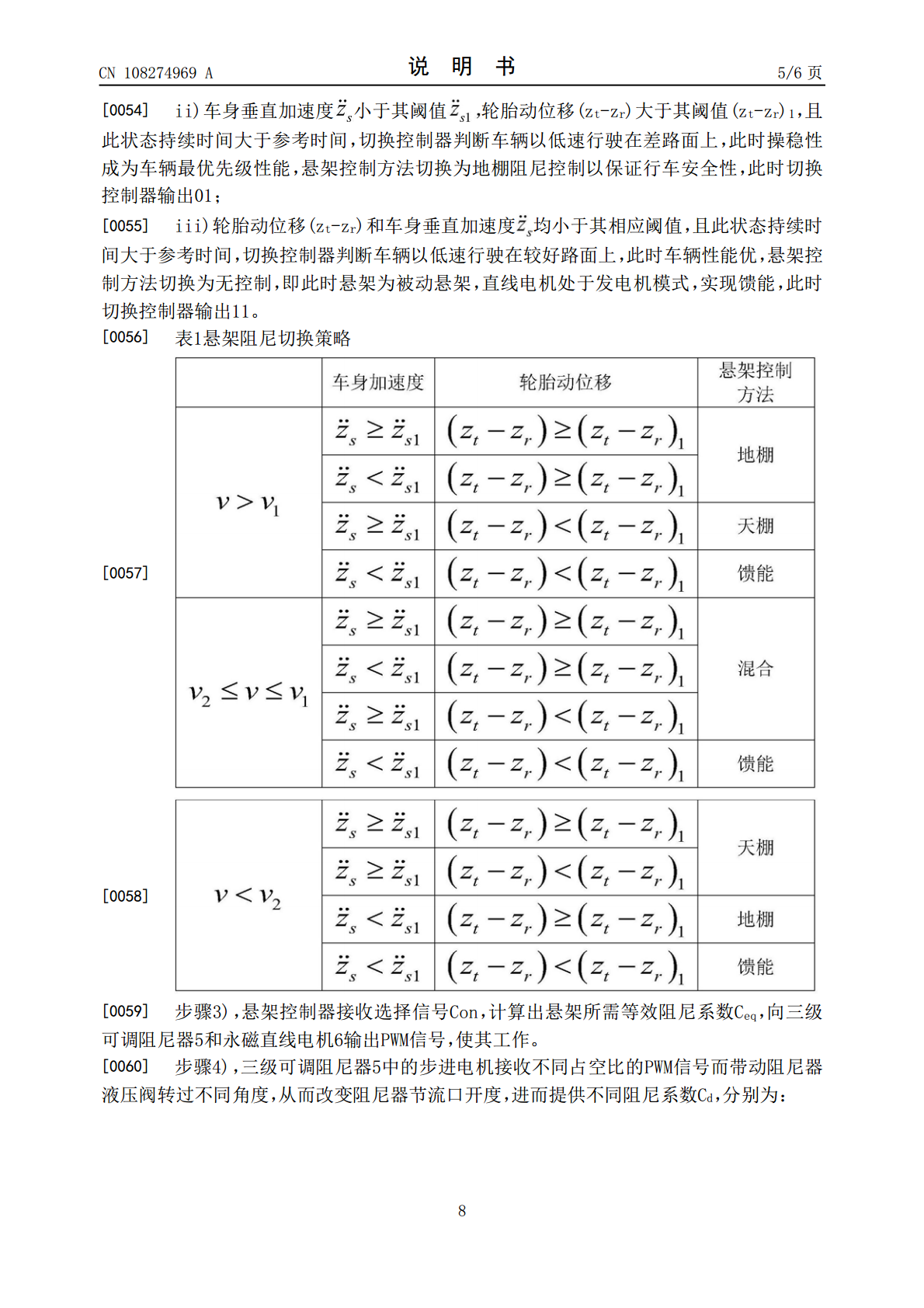
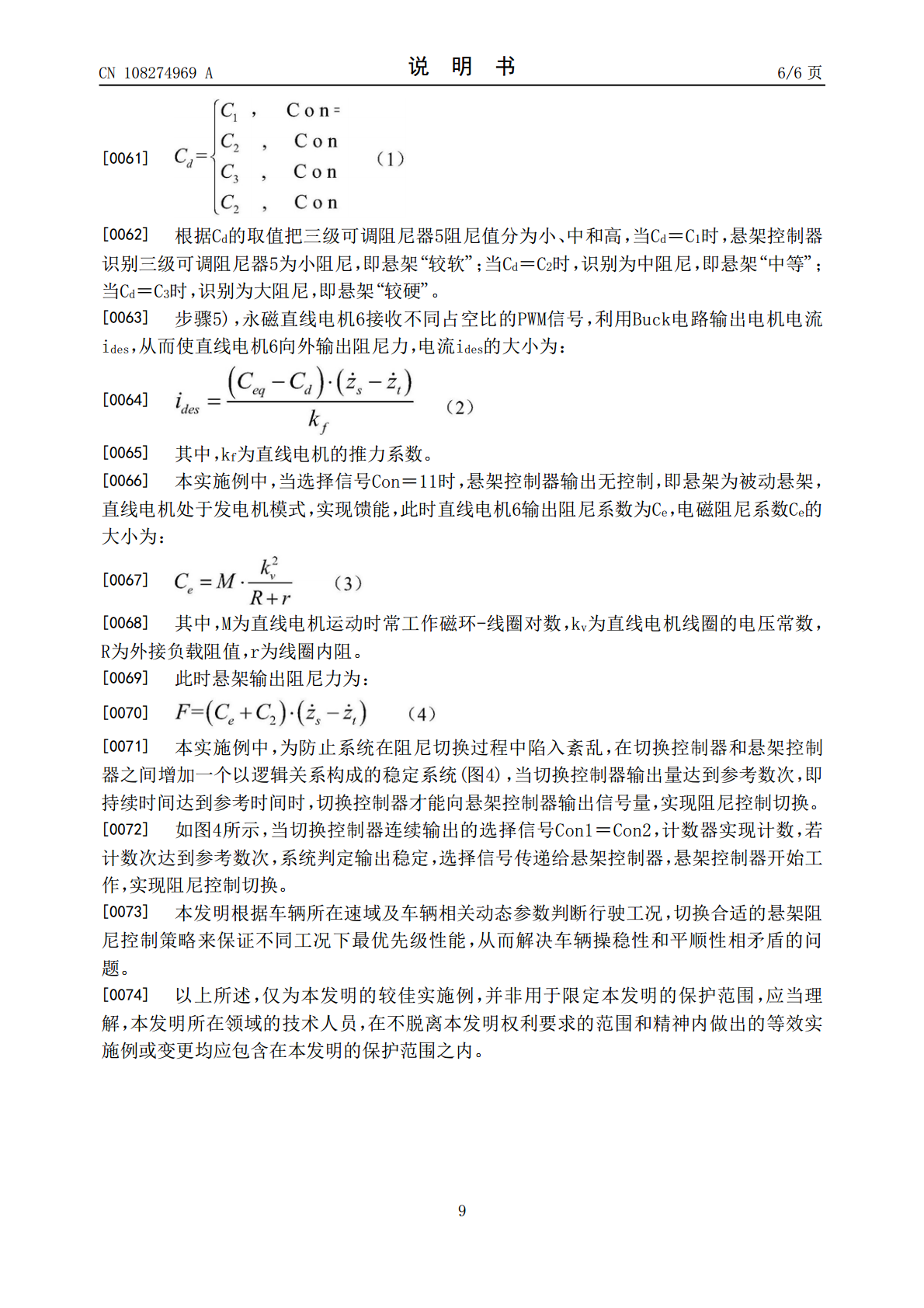
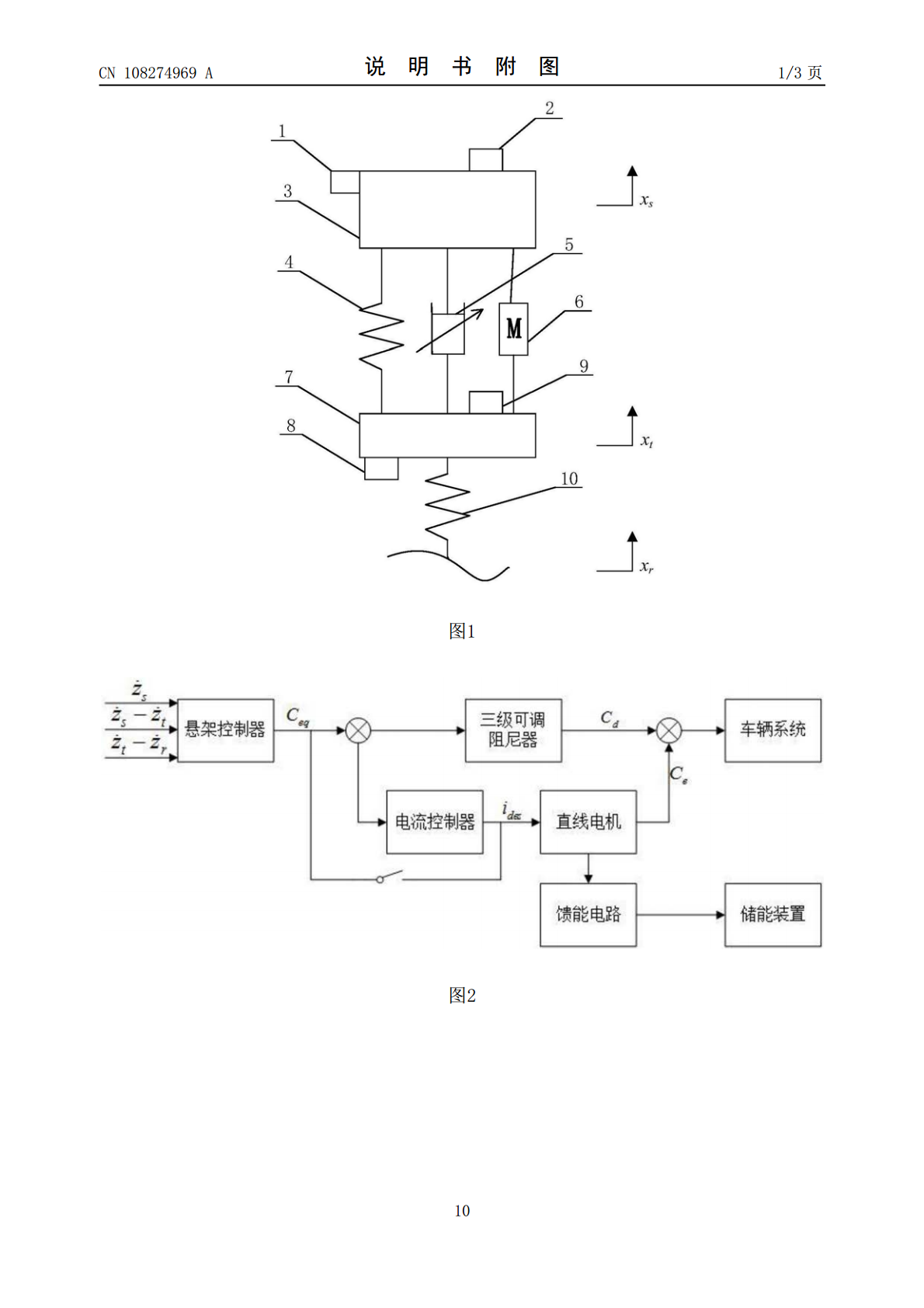
本发明公开一种基于车速分区的馈能悬架及其阻尼切换控制方法,馈能悬架由传感器模块、控制器模块、稳定模块和执行器模块组成,控制器模块由切换控制器和悬架控制器构成,执行器模块包括三级可调阻尼器、永磁直线电机、Buck电路和馈能电路。本发明将车速划分为高、中、低速,在每一速域内,以车身垂直加速度和轮胎动位移作为切换参数判断车辆行驶工况,通过切换天棚、地棚和混合天棚‑地棚阻尼控制策略来调节可调阻尼器阻尼值和直线电机绕组电流,以完成悬架阻尼切换过程,从而解决车辆行驶中操稳性和平顺性的矛盾问题。本发明简单易行,实时性好

一种可切换悬架及其减震馈能方法.pdf
本发明公开了一种可切换悬架及其减震馈能方法。现有的车辆悬架只是单独的独立悬架或非独立悬架。本发明一种可切换悬架,包括馈能减震机构、分合组件和减振器。分合组件包括锁合公块、电机、丝杠、第一轮轴和第二轮轴。馈能减震机构包括连接架、弹簧、保护盖、线圈、安装架、磁铁、活塞杆、缸体和支承座。活塞杆由一体成型的连接杆和活塞体组成。连接杆的底端与活塞体连接,顶端与连接架固定。连接架与汽车底盘铰接。连接杆与下支承座构成滑动副。弹簧的两端与连接架、下支承座分别固定。连接杆上绕有线圈。本发明与传统的被动悬架相比,不仅可以降低

电磁馈能型半主动悬架馈能阻尼实时控制装置及方法.pdf
本发明公开一种车辆电磁馈能型半主动悬架馈能阻尼实时控制装置及方法,馈能电机下部输入端连接行星齿轮升速机构,行星齿轮升速机构下部输入端连接滚珠丝杠上端;馈能控制电路包括电压表、可控开关和蓄电池;根据馈能阻尼力大小,在1个蓄电池的电压、2个相邻蓄电池串联的电压及3个蓄电池串联的电压中选择最能满足所述馈能阻尼力的充电电压,由控制单元控制相应可控开关的接通与断开,按照对电压最小的蓄电池或对电压之和最小的2个相邻串联蓄电池优先充电的原则对蓄电池进行充电;可使馈能电机选择在效率最高的转速范围内工作,提高能量转化效率,
一种直线电机式馈能悬架系统超级电容模式切换电路及其方法.pdf
本发明公开了一种直线电机式馈能悬架系统超级电容模式切换电路及其方法,包括控制单元ECU、电压检测电路、两个超级电容、四个MOS管、两个MOS管驱动芯片IR2101、光电耦合器、直线电机、整流器、DC/DC变换器、电阻R、能量总储装置、蜂鸣器;所述控制单元ECU通过检测两个超级电容A、B两端的电压,当充电电容电压达到规定值即切换为放电电容,同时放电电容切换为充电电容。充电电容负责吸收发电机产生的能量,放电电容始终向DC/DC电路或者电池提供能量。本发明加入了针对电压过大时的报警及内阻直接耗能的保护措施。本发

基于阻尼状态切换的装载机座椅悬架控制.docx
基于阻尼状态切换的装载机座椅悬架控制引言:随着工业自动化和机器人的发展,现代装载机已成为建筑、工程、农业、矿山和其他领域不可缺少的设备。但是,由于装载机常常在恶劣的环境下运行,包括颠簸的地面和振动的路面,驾驶员舒适度成为了一个重要的问题。因此,研发和设计高效的座椅悬架系统来减轻驾驶员的疲劳和增加驾驶员舒适度变得越来越重要。阻尼状态切换技术(DampedStateSwitchingTechnology,DSST)是一种新颖的悬架控制技术,它是一种能够维持悬架系统在不同工况下有效跟随驾驶员指令,并减少机体振动