
一种电动轮驱动汽车复合节能助力转向装置及其控制方法.pdf

是雁****找我


1/10
2/10

3/10
4/10

5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种电动轮驱动汽车复合节能助力转向装置及其控制方法.pdf
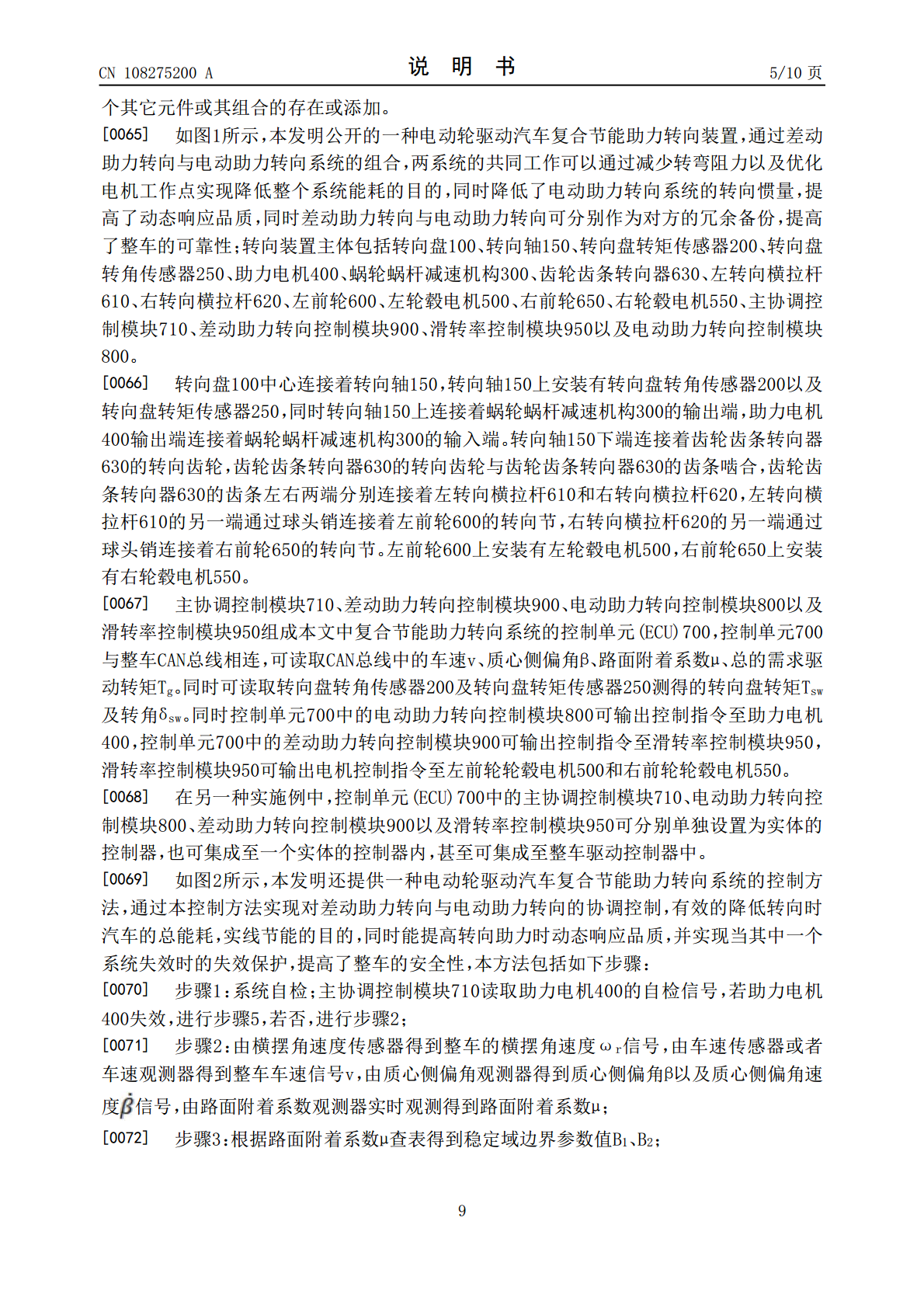
本发明公开了一种电动轮驱动汽车复合节能助力转向装置,包括:包括转向盘、转向轴、转向盘转矩传感器、转向盘转角传感器、助力电机、蜗轮蜗杆减速机构、齿轮齿条转向器、左转向横拉杆、右转向横拉杆、左前轮、左轮毂电机、右前轮、右轮毂电机、主协调控制模块、差动助力转向控制模块、滑转率控制模块以及电动助力转向控制模块。本发明还公开了一种电动轮驱动汽车复合节能助力转向装置的控制方法,包括:采集数据,根据监测数据进入节能转向模式、安全转向模式和失效保护模式。

一种新型节能电动轮汽车差速助力转向系统及其控制方法.pdf
本发明涉及一种新型节能电动轮汽车差速助力转向系统,包括电动轮、转向装置、制动装置,所述的制动装置包括左右电动轮的左制动器、右制动器,左、右制动器分别通过油路与一个液压转阀相连,液压转阀与一个差动分配阀相连,差动分配阀的主油路通过一个常开式电磁通断阀与一个蓄能器相连,差动分配阀的控制机构与一个设于左右电动轮轮轴上的机械式离心调节装置相连。实现了一种能够在汽车失电状态下,通过机械的方式达到助力转向的效果,以帮助车子平稳转向的新型节能电动轮汽车差速助力转向系统。
一种助力转向与独立驱动集成式轮边电驱动装置及其控制方法.pdf
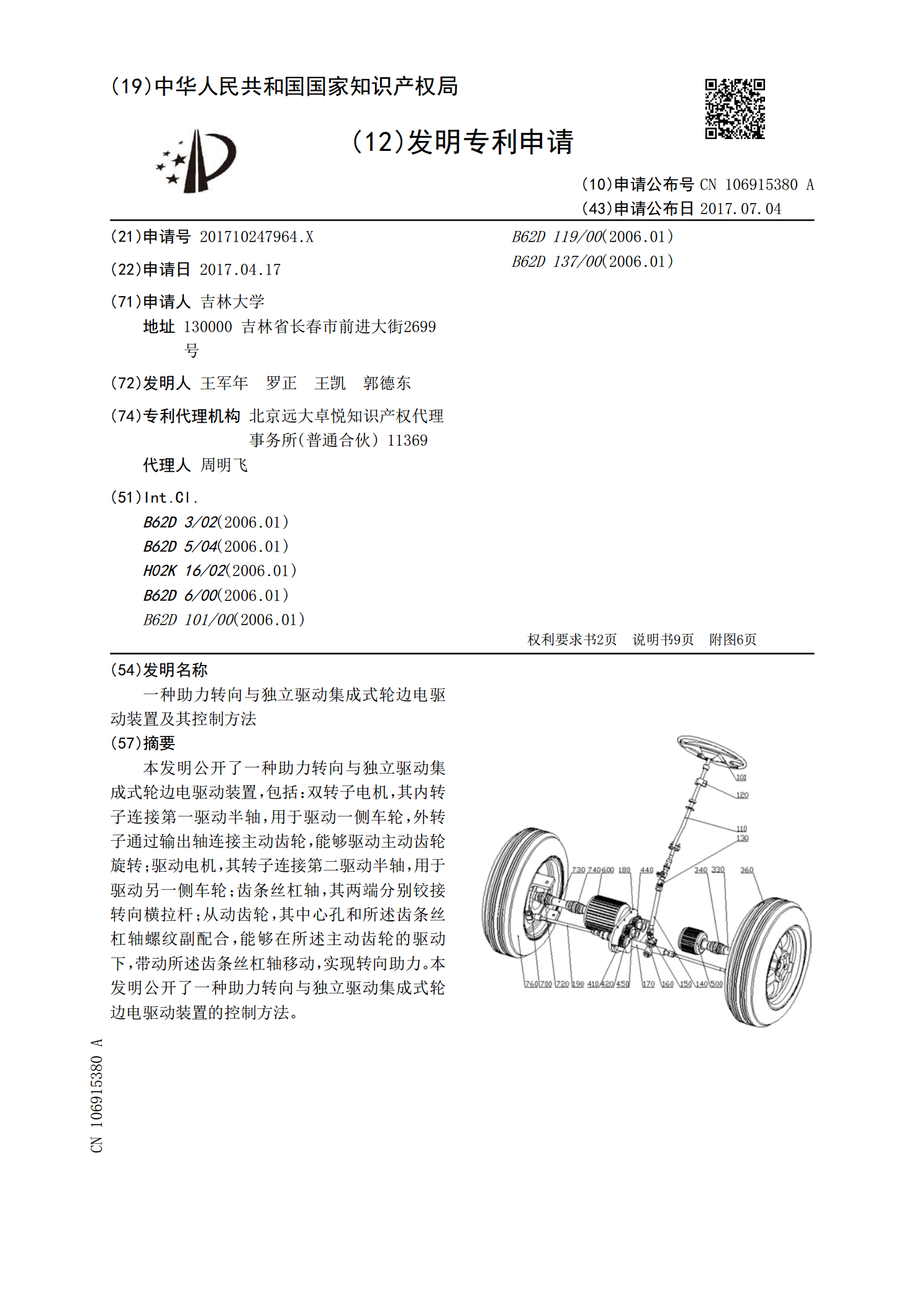
本发明公开了一种助力转向与独立驱动集成式轮边电驱动装置,包括:双转子电机,其内转子连接第一驱动半轴,用于驱动一侧车轮,外转子通过输出轴连接主动齿轮,能够驱动主动齿轮旋转;驱动电机,其转子连接第二驱动半轴,用于驱动另一侧车轮;齿条丝杠轴,其两端分别铰接转向横拉杆;从动齿轮,其中心孔和所述齿条丝杠轴螺纹副配合,能够在所述主动齿轮的驱动下,带动所述齿条丝杠轴移动,实现转向助力。本发明公开了一种助力转向与独立驱动集成式轮边电驱动装置的控制方法。

一种电动轮驱动汽车差动助力转向与稳定性协调控制方法.pdf
本发明公开了一种电动轮驱动汽车差动助力转向与稳定性协调控制方法,包括:对车辆行驶后的前轮差动力矩和维持稳定性所需的横摆力矩进行计算;判断车辆行驶过程中所属于的相平面控制区域,根据所述相平面控制区域确定差动转向的工作权重系数,通过所述工作权重系数对所述前轮差动力矩进行调整;对车辆行驶后的驱动力矩进行计算;根据车辆所属于的相平面控制区域,将所述驱动力矩、调整后的前轮差动力矩和所述横摆力矩分配到车轮并进行修正,将修正后的车轮需求力矩数据输出。

一种用于电动轮驱动汽车的线控转向机构及其控制方法.pdf
本发明公开了一种用于电动轮驱动汽车的线控转向机构,包括:电动轮,其同轴中心具有电机轴;转向节,其中心具有第一连接孔,所述第一连接孔内套设所述电机轴;凸起,其垂直设置在所述转向节上,所述凸起上设置第二连接孔;涡轮轴,其竖直固定在所述第二连接孔内;电机座,其设置在所述转向节上,与所述转向节能够相对转动;下横臂,其一端与车身连接,另一端与所述电机座铰接;转向电机,其设置在所述电机座上,所述转向电机的输出端设置蜗杆,所述蜗杆与所述涡轮轴啮合。本发明提供了一种用于电动轮驱动汽车的线控转向机构,采用电传连接,通过转向