
一种基于纵向力观测器的车辆质心侧偏角鲁棒估计方法.pdf

是你****松呀


1/10

2/10

3/10
4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于纵向力观测器的车辆质心侧偏角鲁棒估计方法.pdf
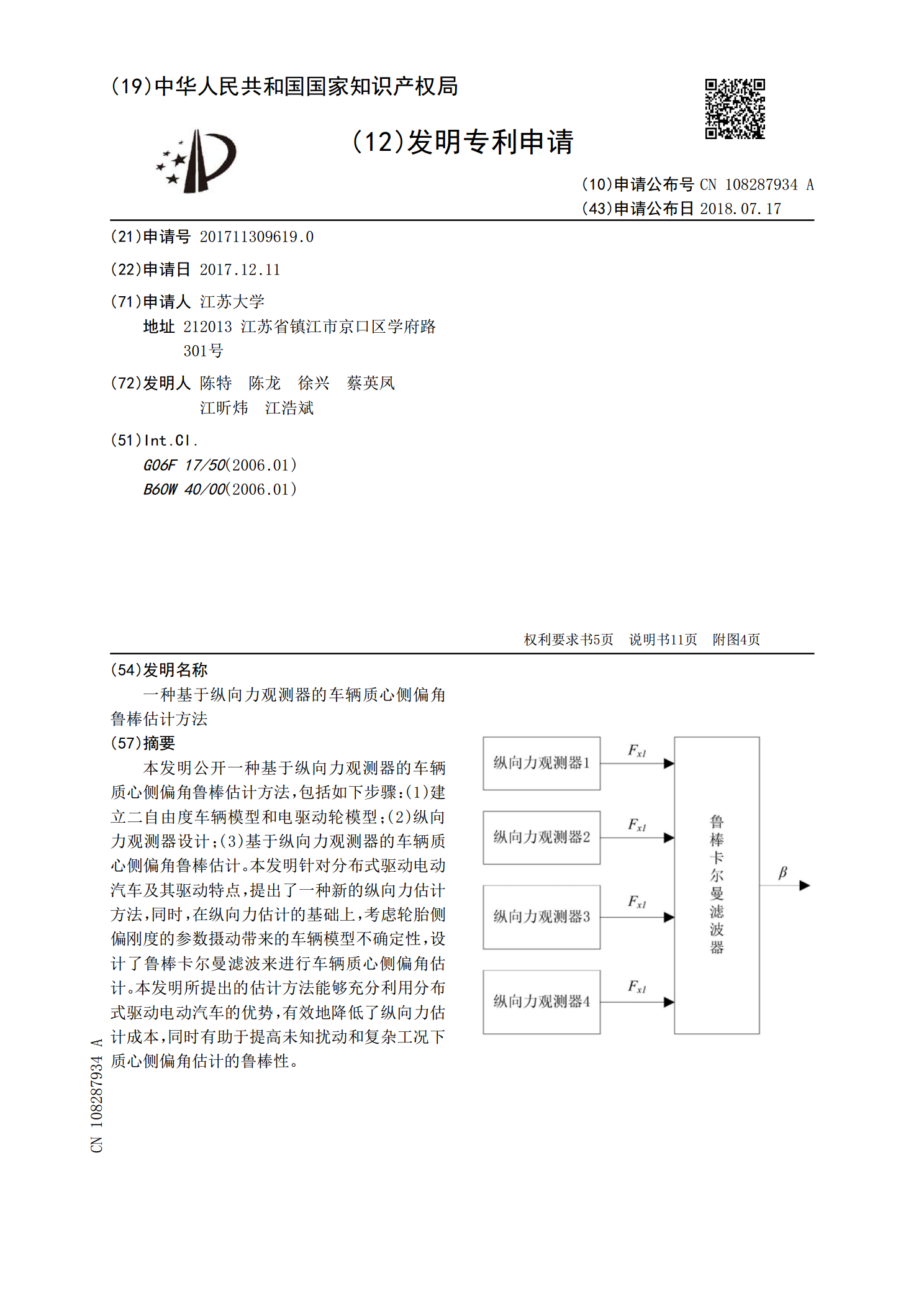
本发明公开一种基于纵向力观测器的车辆质心侧偏角鲁棒估计方法,包括如下步骤:(1)建立二自由度车辆模型和电驱动轮模型;(2)纵向力观测器设计;(3)基于纵向力观测器的车辆质心侧偏角鲁棒估计。本发明针对分布式驱动电动汽车及其驱动特点,提出了一种新的纵向力估计方法,同时,在纵向力估计的基础上,考虑轮胎侧偏刚度的参数摄动带来的车辆模型不确定性,设计了鲁棒卡尔曼滤波来进行车辆质心侧偏角估计。本发明所提出的估计方法能够充分利用分布式驱动电动汽车的优势,有效地降低了纵向力估计成本,同时有助于提高未知扰动和复杂工况下质心
一种基于新型模糊观测器的车辆质心侧偏角的估计方法.pdf
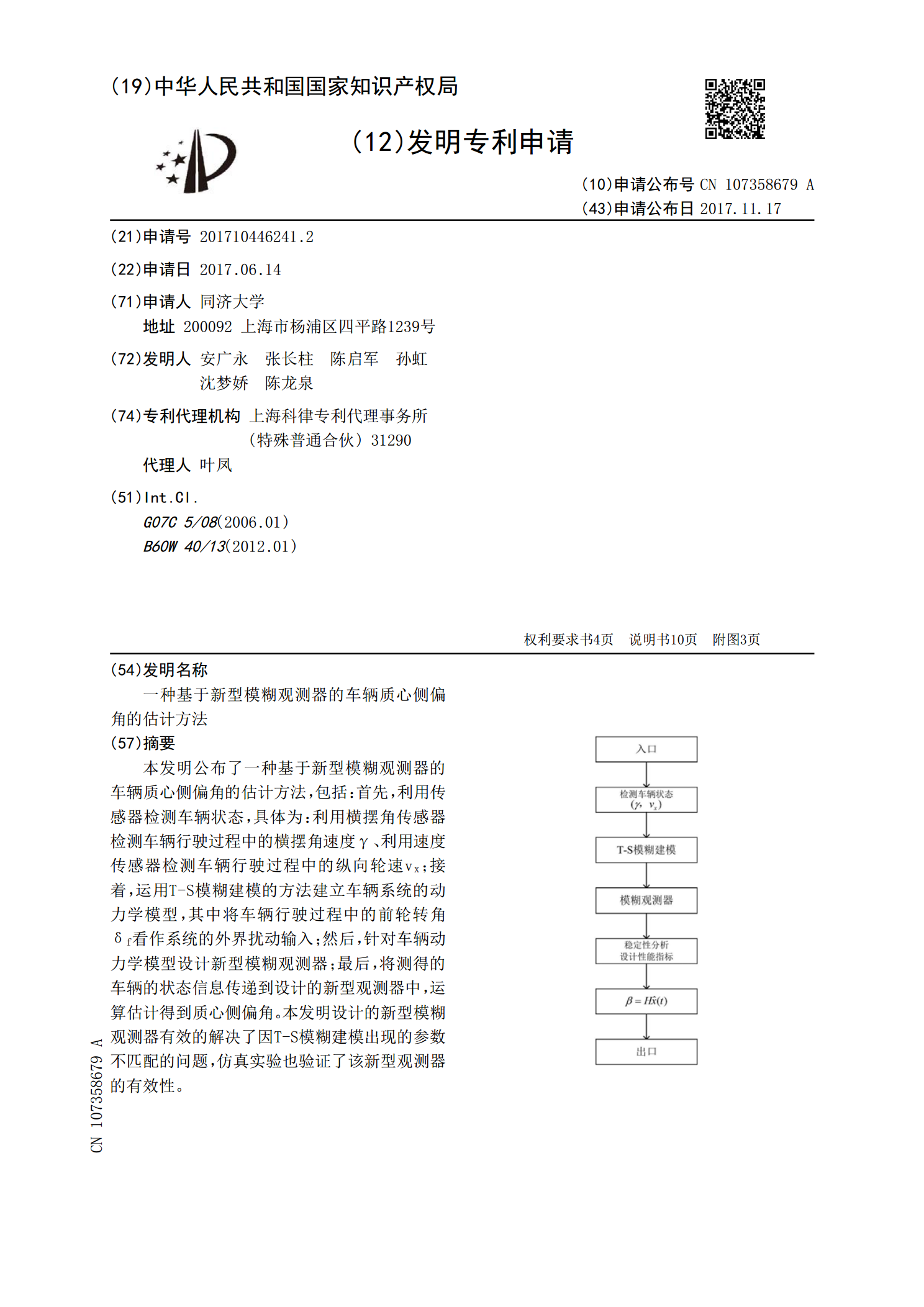
本发明公布了一种基于新型模糊观测器的车辆质心侧偏角的估计方法,包括:首先,利用传感器检测车辆状态,具体为:利用横摆角传感器检测车辆行驶过程中的横摆角速度γ、利用速度传感器检测车辆行驶过程中的纵向轮速vx;接着,运用T?S模糊建模的方法建立车辆系统的动力学模型,其中将车辆行驶过程中的前轮转角δf看作系统的外界扰动输入;然后,针对车辆动力学模型设计新型模糊观测器;最后,将测得的车辆的状态信息传递到设计的新型观测器中,运算估计得到质心侧偏角。本发明设计的新型模糊观测器有效的解决了因T?S模糊建模出现的参数不匹配
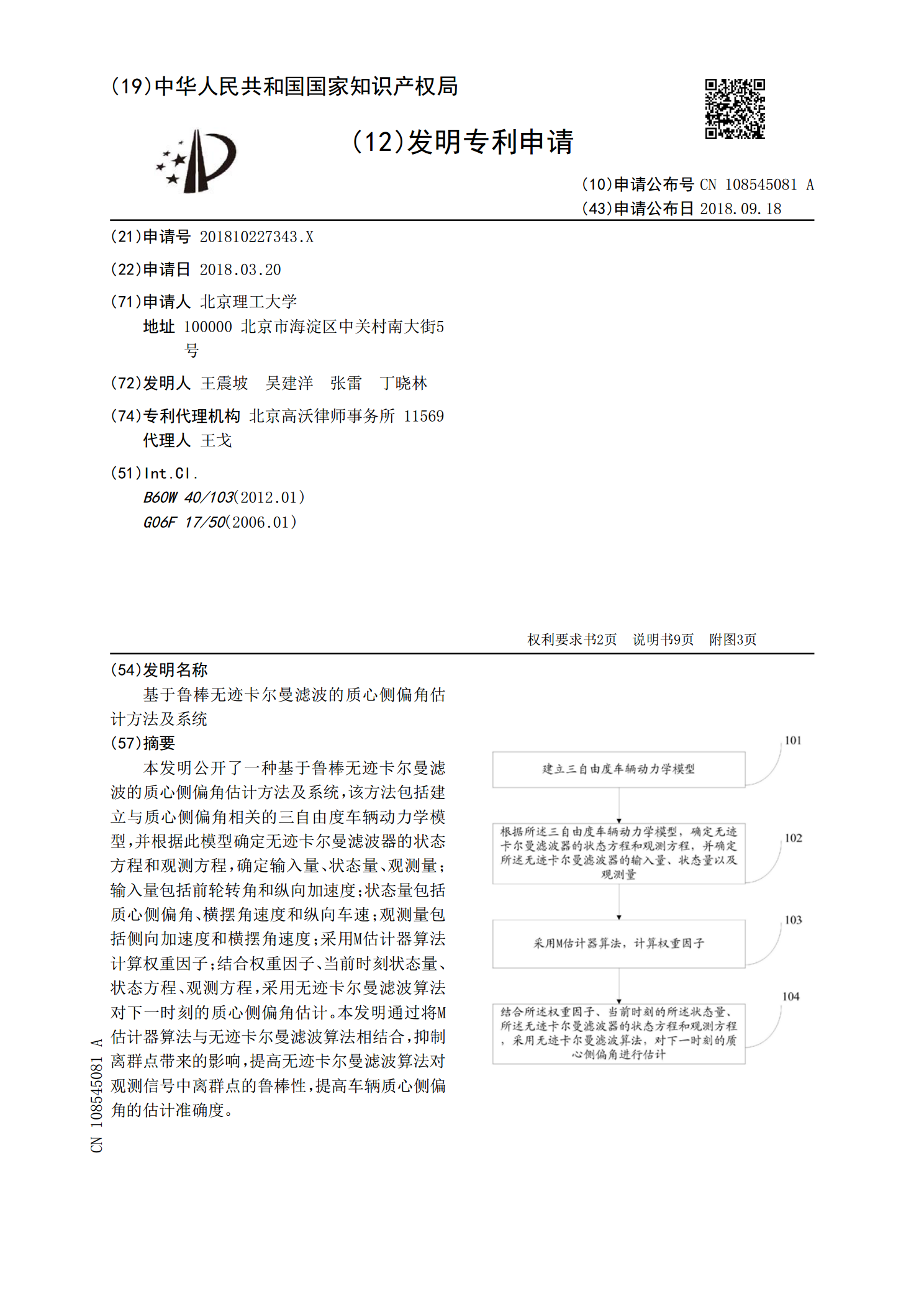
基于鲁棒无迹卡尔曼滤波的质心侧偏角估计方法及系统.pdf
本发明公开了一种基于鲁棒无迹卡尔曼滤波的质心侧偏角估计方法及系统,该方法包括建立与质心侧偏角相关的三自由度车辆动力学模型,并根据此模型确定无迹卡尔曼滤波器的状态方程和观测方程,确定输入量、状态量、观测量;输入量包括前轮转角和纵向加速度;状态量包括质心侧偏角、横摆角速度和纵向车速;观测量包括侧向加速度和横摆角速度;采用M估计器算法计算权重因子;结合权重因子、当前时刻状态量、状态方程、观测方程,采用无迹卡尔曼滤波算法对下一时刻的质心侧偏角估计。本发明通过将M估计器算法与无迹卡尔曼滤波算法相结合,抑制离群点带来

一种基于二阶滑模观测器的车辆质心侧偏角的估计方法.pdf
本发明公开了一种基于二阶滑模观测器的车辆质心侧偏角的估计方法,属于车辆控制领域,包括:步骤1:利用传感器检测车辆状态,具体为:利用速度传感器检测车辆运行的纵向轮速v

一种同时估计车辆质心侧偏角和扰动的方法.pdf
本发明公开了一种同时估计车辆质心侧偏角和扰动的方法,属于车辆控制领域。主要步骤为:1、利用方向盘转角传感器、横摆角速度传感器和速度传感器分别检测车辆运行过程中的前轮转角δ、横摆角速度ω和纵向轮速v