
一种同时估计车辆质心侧偏角和扰动的方法.pdf

丹烟****魔王

1/10

2/10
3/10
4/10

5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种同时估计车辆质心侧偏角和扰动的方法.pdf
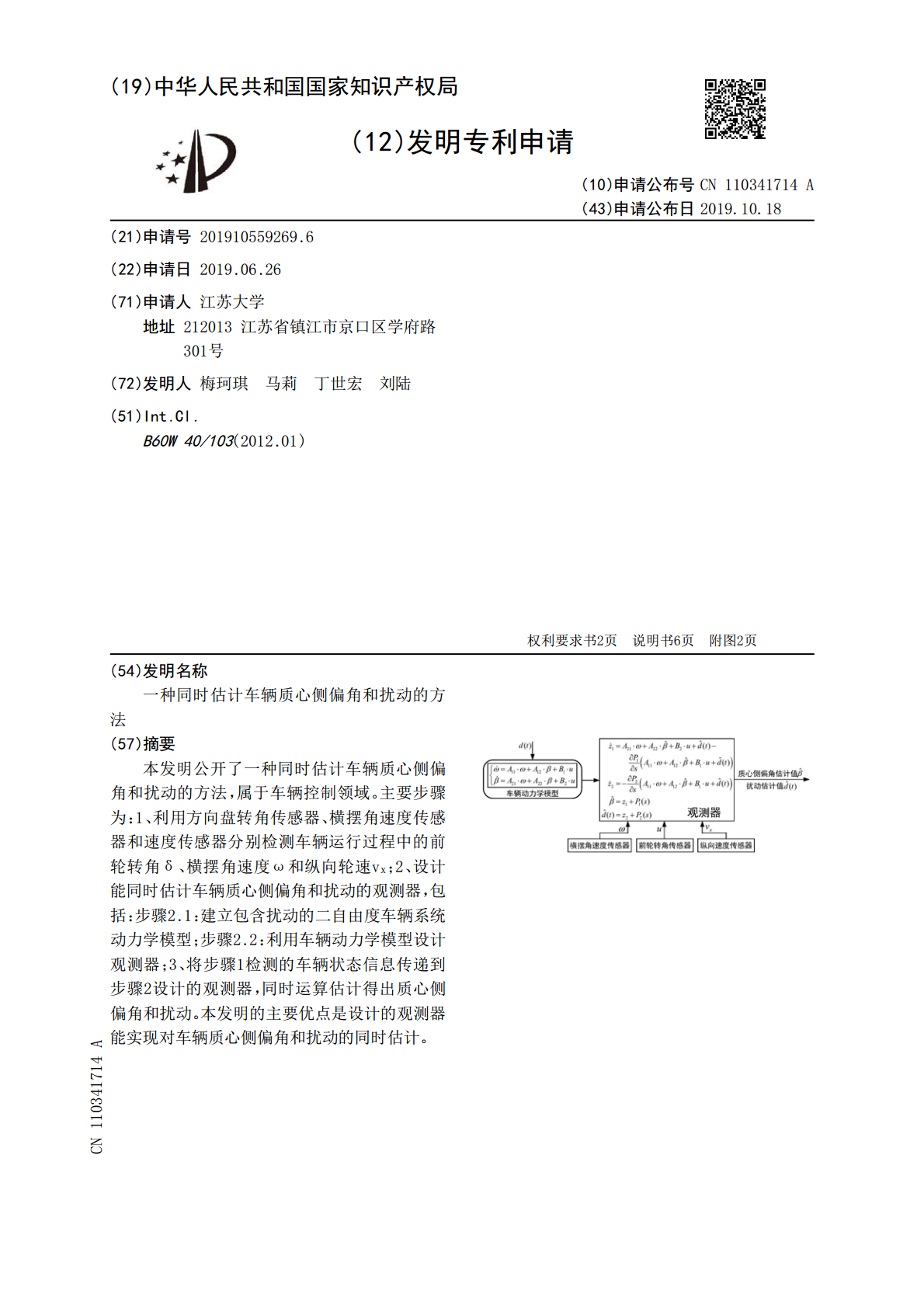
本发明公开了一种同时估计车辆质心侧偏角和扰动的方法,属于车辆控制领域。主要步骤为:1、利用方向盘转角传感器、横摆角速度传感器和速度传感器分别检测车辆运行过程中的前轮转角δ、横摆角速度ω和纵向轮速v
质心侧偏角和轮胎侧偏角的测量方法、装置及车辆.pdf
本发明公开了一种质心侧偏角和轮胎侧偏角的测量方法、装置及车辆。其中,方法包括:采集车辆的当前横摆角速度;获取车辆的地图信息,并根据地图信息差分得到多个预设车身位置的当前速度;根据当前横摆角速度和多个预设车身位置的当前速度得到车辆的当前横向车速和当前纵向车速;根据当前横向车速和所当前纵向车速得到车辆的当前质心侧偏角和当前轮胎侧偏角。该方法可以通过地图信息差分得到多个车身位置的当前速度,以得到当前横向车速和所当前纵向车速,从而得到当前质心侧偏角和当前轮胎侧偏角,提高测量的精确性,更好地保证车辆的稳定性,有效保
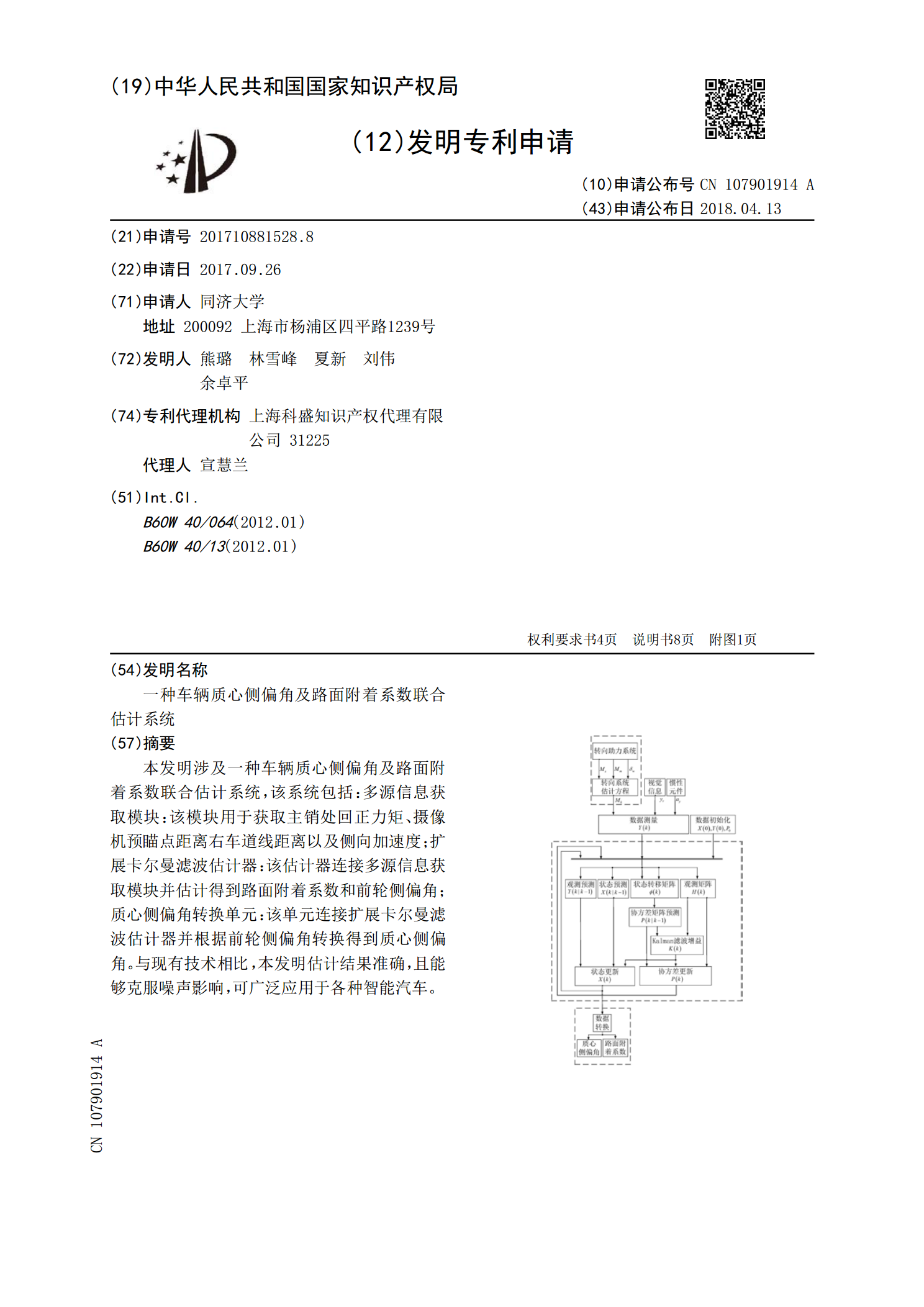
一种车辆质心侧偏角及路面附着系数联合估计系统.pdf
本发明涉及一种车辆质心侧偏角及路面附着系数联合估计系统,该系统包括:多源信息获取模块:该模块用于获取主销处回正力矩、摄像机预瞄点距离右车道线距离以及侧向加速度;扩展卡尔曼滤波估计器:该估计器连接多源信息获取模块并估计得到路面附着系数和前轮侧偏角;质心侧偏角转换单元:该单元连接扩展卡尔曼滤波估计器并根据前轮侧偏角转换得到质心侧偏角。与现有技术相比,本发明估计结果准确,且能够克服噪声影响,可广泛应用于各种智能汽车。
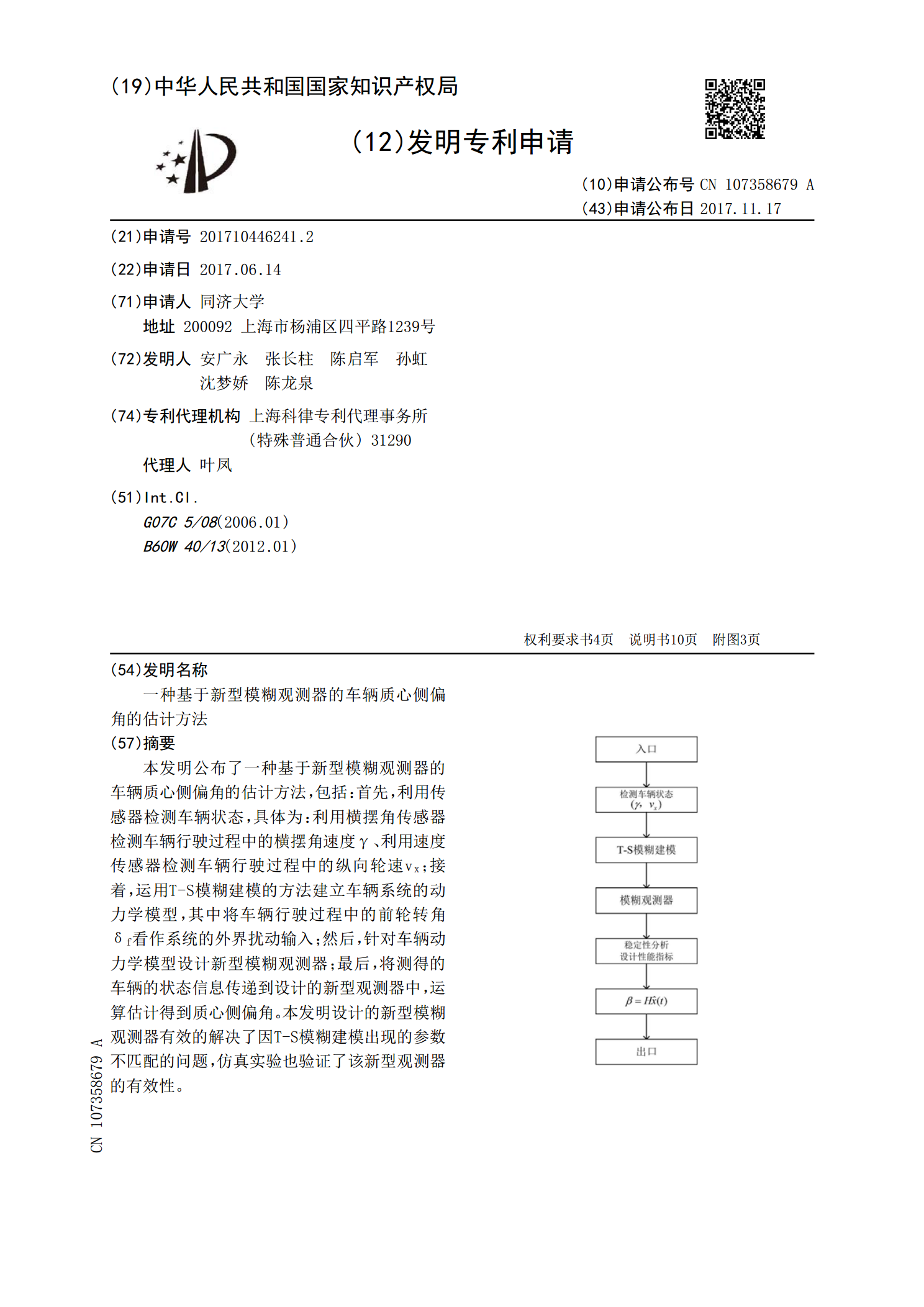
一种基于新型模糊观测器的车辆质心侧偏角的估计方法.pdf
本发明公布了一种基于新型模糊观测器的车辆质心侧偏角的估计方法,包括:首先,利用传感器检测车辆状态,具体为:利用横摆角传感器检测车辆行驶过程中的横摆角速度γ、利用速度传感器检测车辆行驶过程中的纵向轮速vx;接着,运用T?S模糊建模的方法建立车辆系统的动力学模型,其中将车辆行驶过程中的前轮转角δf看作系统的外界扰动输入;然后,针对车辆动力学模型设计新型模糊观测器;最后,将测得的车辆的状态信息传递到设计的新型观测器中,运算估计得到质心侧偏角。本发明设计的新型模糊观测器有效的解决了因T?S模糊建模出现的参数不匹配
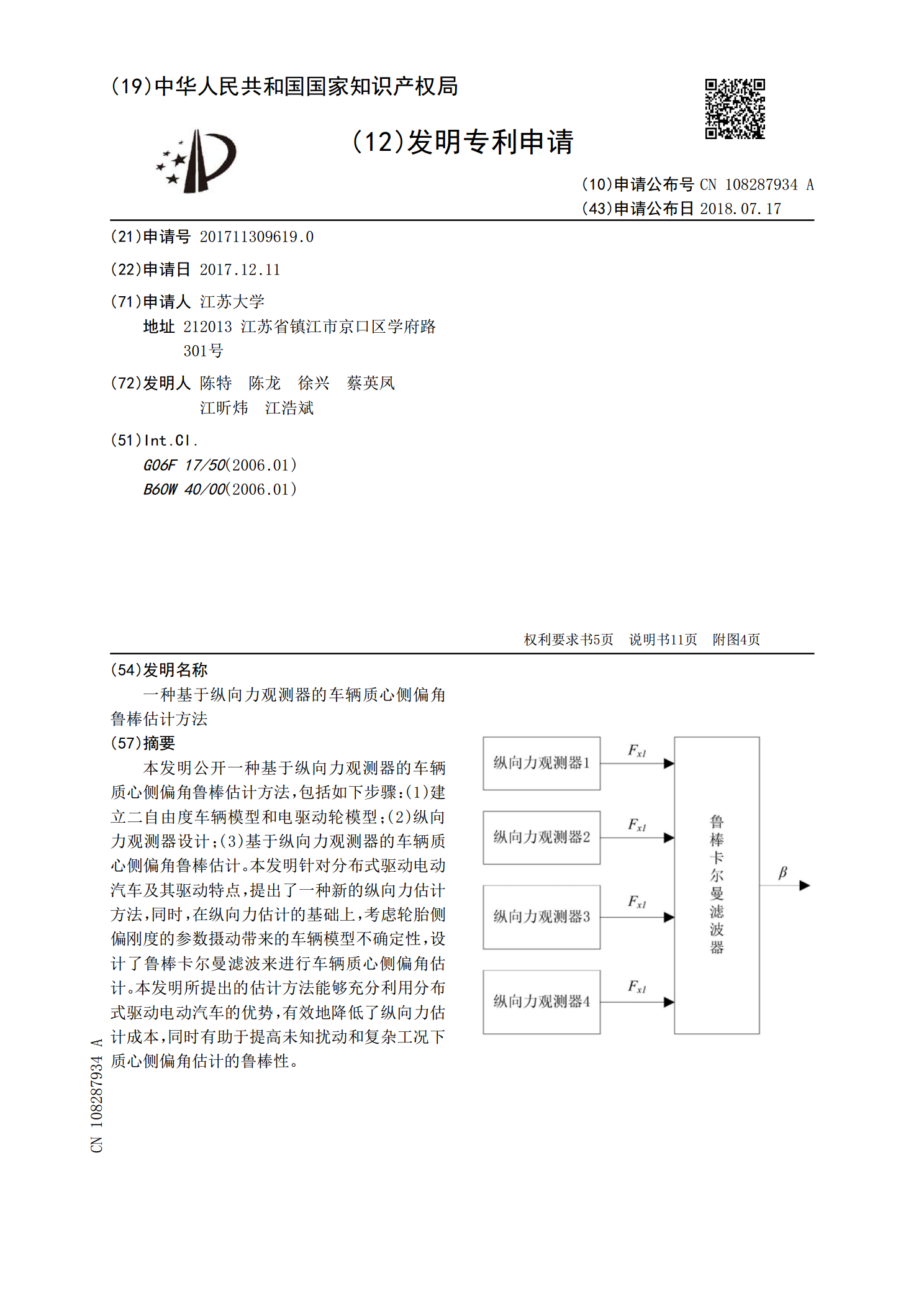
一种基于纵向力观测器的车辆质心侧偏角鲁棒估计方法.pdf
本发明公开一种基于纵向力观测器的车辆质心侧偏角鲁棒估计方法,包括如下步骤:(1)建立二自由度车辆模型和电驱动轮模型;(2)纵向力观测器设计;(3)基于纵向力观测器的车辆质心侧偏角鲁棒估计。本发明针对分布式驱动电动汽车及其驱动特点,提出了一种新的纵向力估计方法,同时,在纵向力估计的基础上,考虑轮胎侧偏刚度的参数摄动带来的车辆模型不确定性,设计了鲁棒卡尔曼滤波来进行车辆质心侧偏角估计。本发明所提出的估计方法能够充分利用分布式驱动电动汽车的优势,有效地降低了纵向力估计成本,同时有助于提高未知扰动和复杂工况下质心