
电动助力转向装置.pdf

夏萍****文章

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
电动助力转向装置.pdf
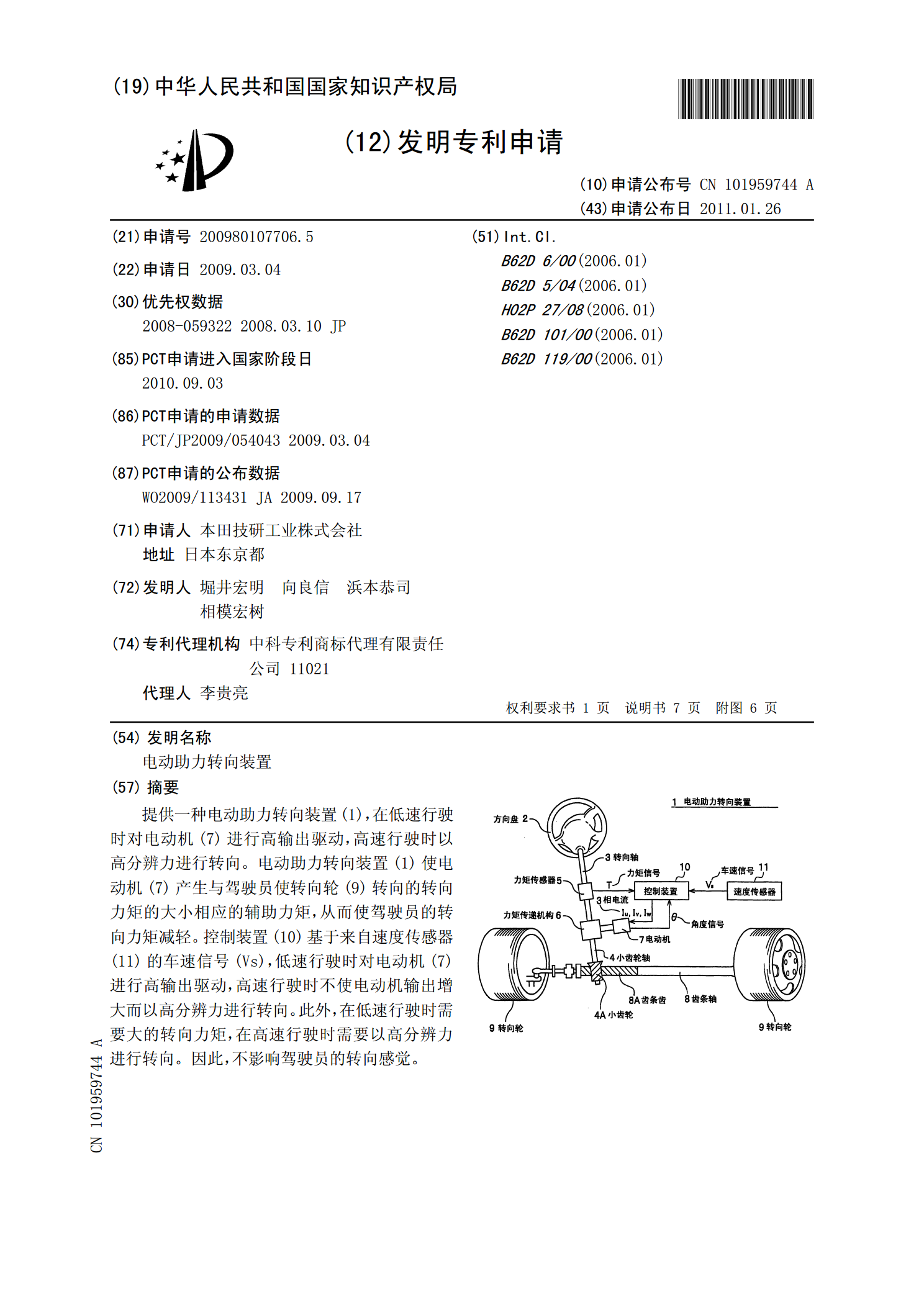
提供一种电动助力转向装置(1),在低速行驶时对电动机(7)进行高输出驱动,高速行驶时以高分辨力进行转向。电动助力转向装置(1)使电动机(7)产生与驾驶员使转向轮(9)转向的转向力矩的大小相应的辅助力矩,从而使驾驶员的转向力矩减轻。控制装置(10)基于来自速度传感器(11)的车速信号(Vs),低速行驶时对电动机(7)进行高输出驱动,高速行驶时不使电动机输出增大而以高分辨力进行转向。此外,在低速行驶时需要大的转向力矩,在高速行驶时需要以高分辨力进行转向。因此,不影响驾驶员的转向感觉。
电动助力转向装置.pdf
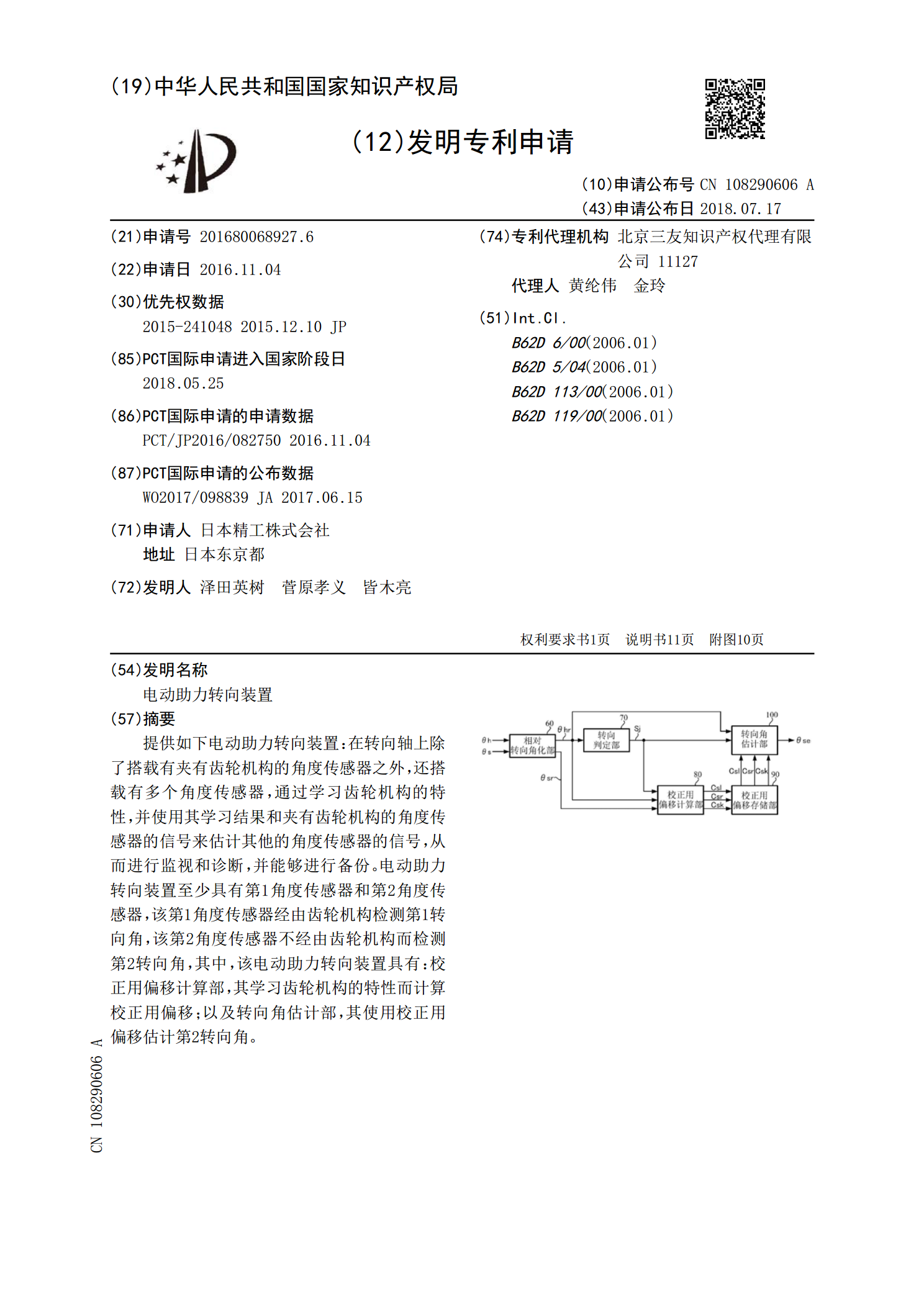
提供如下电动助力转向装置:在转向轴上除了搭载有夹有齿轮机构的角度传感器之外,还搭载有多个角度传感器,通过学习齿轮机构的特性,并使用其学习结果和夹有齿轮机构的角度传感器的信号来估计其他的角度传感器的信号,从而进行监视和诊断,并能够进行备份。电动助力转向装置至少具有第1角度传感器和第2角度传感器,该第1角度传感器经由齿轮机构检测第1转向角,该第2角度传感器不经由齿轮机构而检测第2转向角,其中,该电动助力转向装置具有:校正用偏移计算部,其学习齿轮机构的特性而计算校正用偏移;以及转向角估计部,其使用校正用偏移估计
电动助力转向装置.pdf
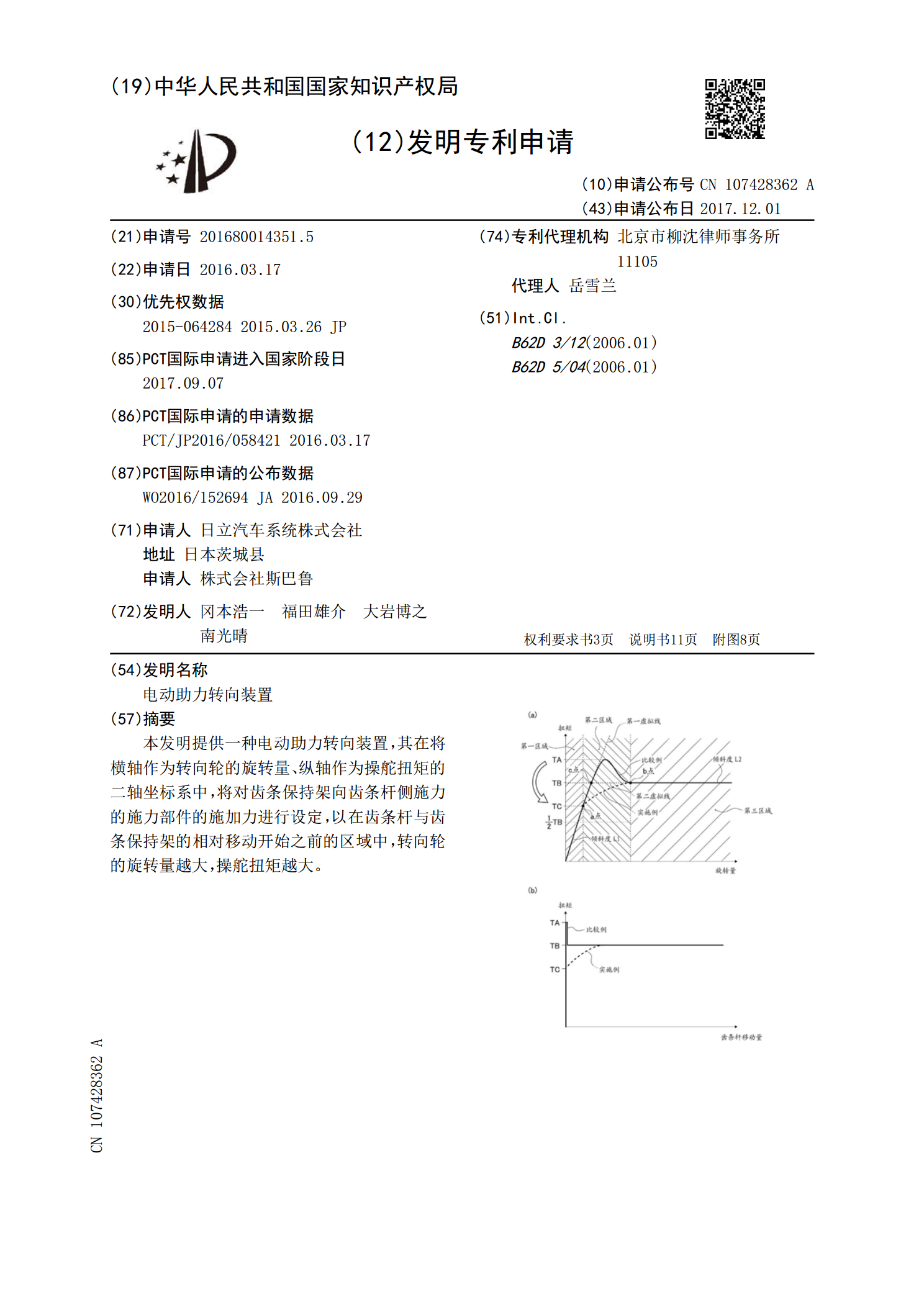
本发明提供一种电动助力转向装置,其在将横轴作为转向轮的旋转量、纵轴作为操舵扭矩的二轴坐标系中,将对齿条保持架向齿条杆侧施力的施力部件的施加力进行设定,以在齿条杆与齿条保持架的相对移动开始之前的区域中,转向轮的旋转量越大,操舵扭矩越大。

电动助力转向装置.pdf
一种电动助力转向装置设置有蜗杆,该蜗杆通过接头以可枢转的方式连接至电马达的旋转轴。蜗杆的第一端部和第二端部由第一轴承和第二轴承支承。一对弹性构件将蜗杆弹性地挤压至轴向方向上的中性位置。由壳体保持的环形板簧通过第二轴承将第二端部向蜗轮侧挤压。具有与板簧相接触的滑动接触表面的合成树脂构件一体地设置于第二轴承。

电动助力转向装置.pdf
本发明涉及一种电动助力转向装置(10)。根据由扭矩传感器(38)检测到的操舵扭矩(Ts)和在辅助马达(44)中流动的马达实际电流(Iact)来推定齿条轴力(Fer),根据推定出的齿条轴力(Fer)来计算转向器的规范操舵扭矩(Tstar),由FB控制部(72)以使转向器的操舵扭矩(Ts)成为规范操舵扭矩(Tstar)的方式对所述马达实际电流(Iact)进行反馈控制。据此,能够抑制转向器的操舵回转时残留的卡顿感。