
伺服控制抱夹搬运器.pdf

努力****亚捷

1/9
2/9
3/9
4/9
5/9

6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
伺服控制抱夹搬运器.pdf
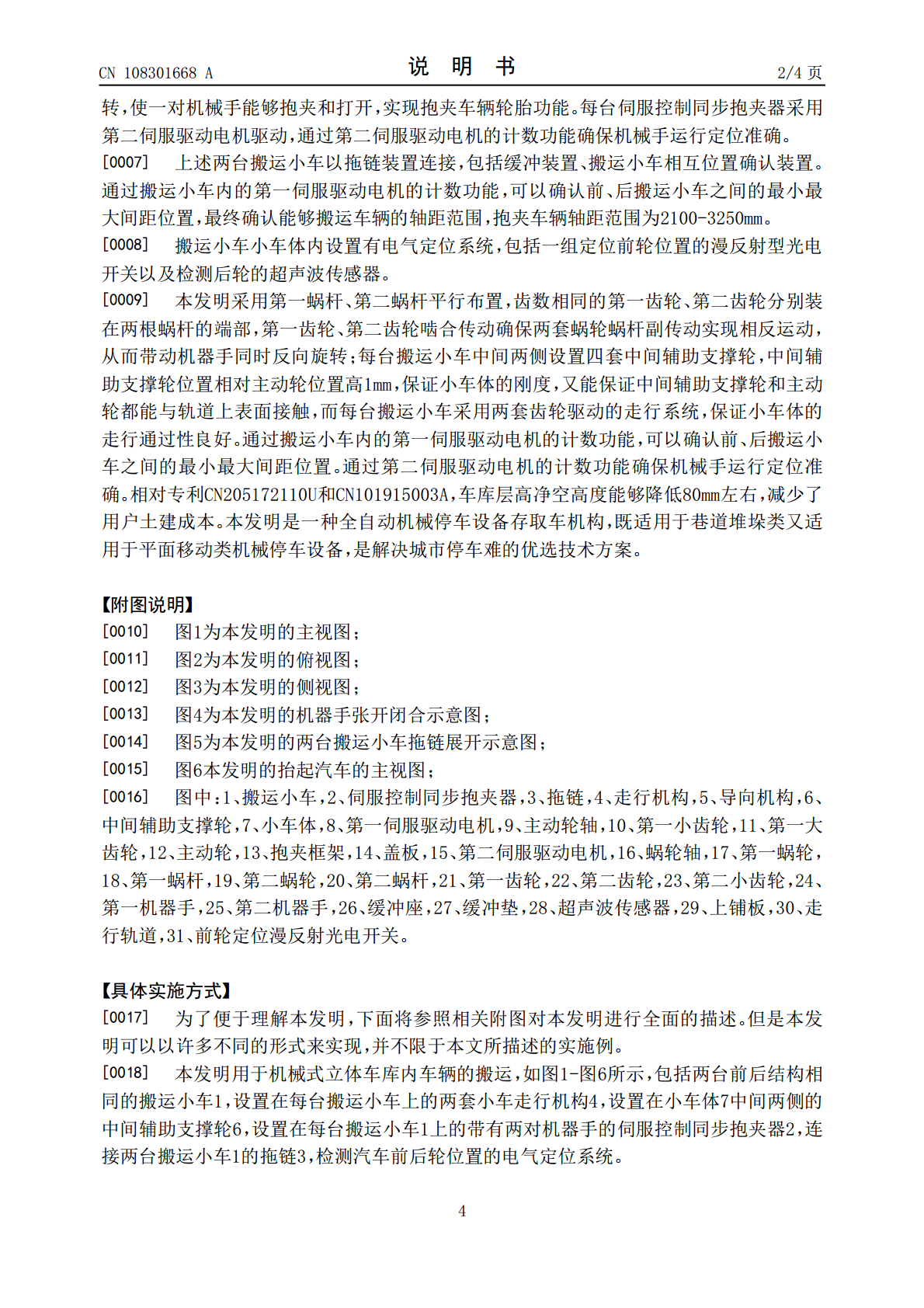
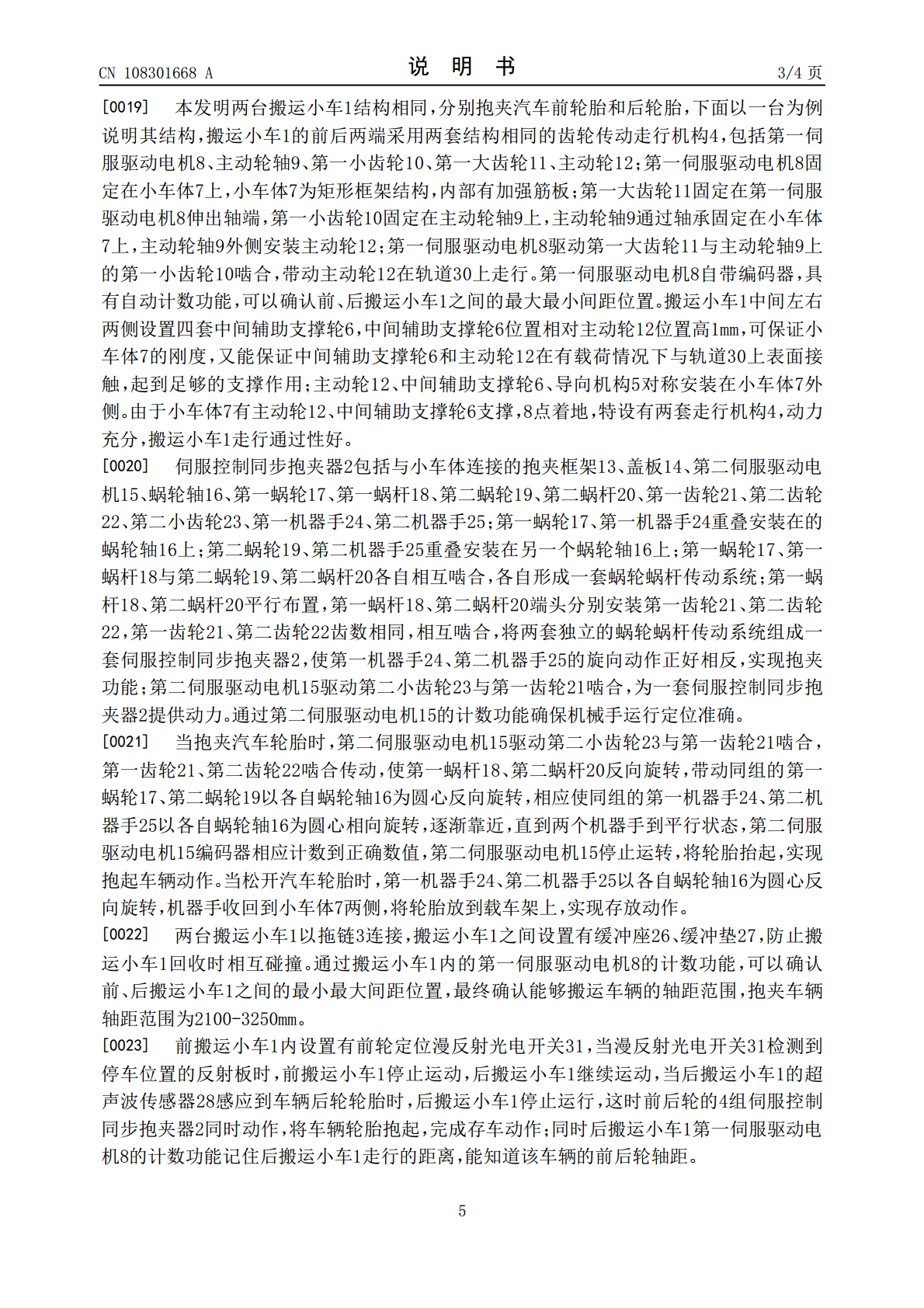
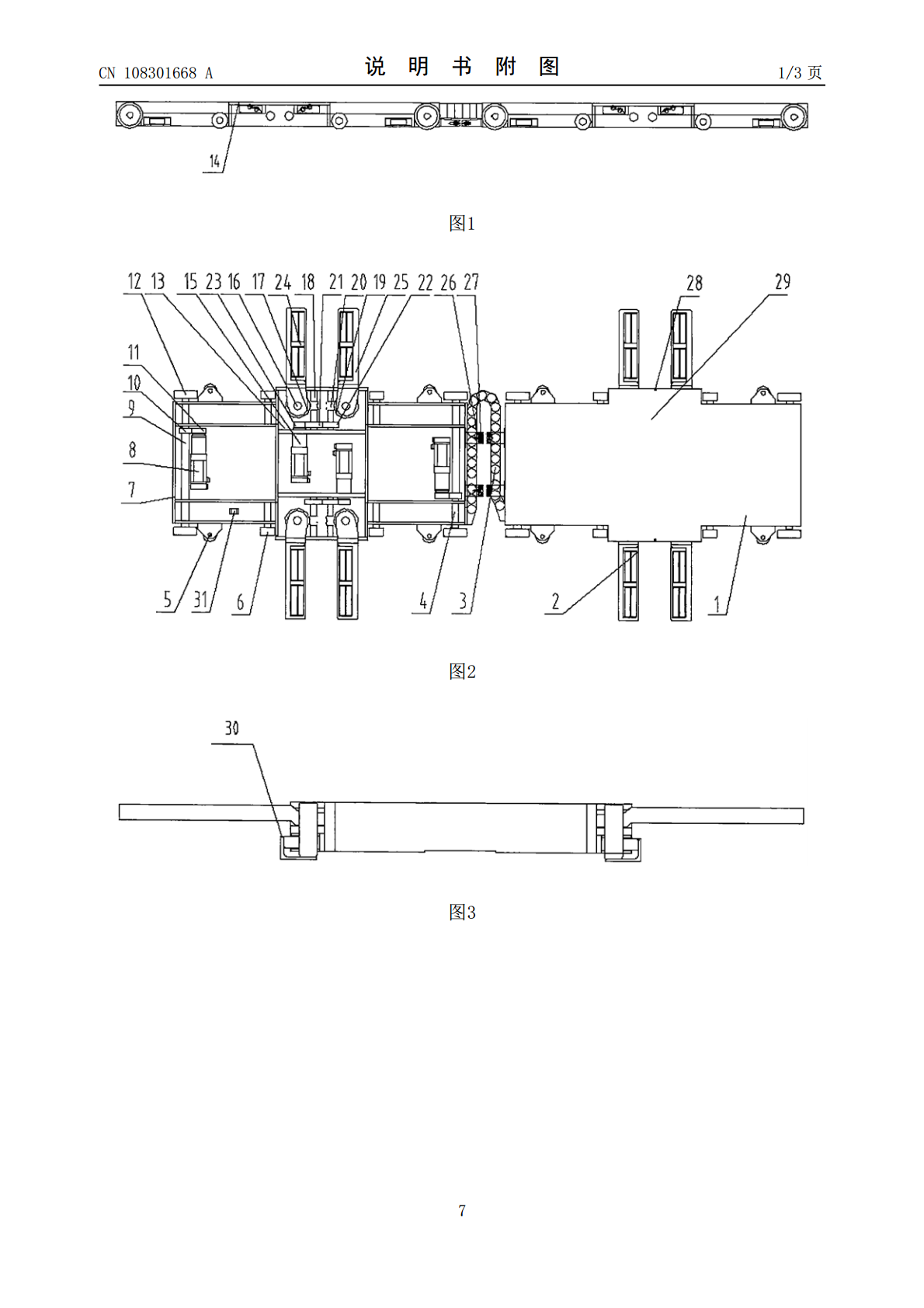
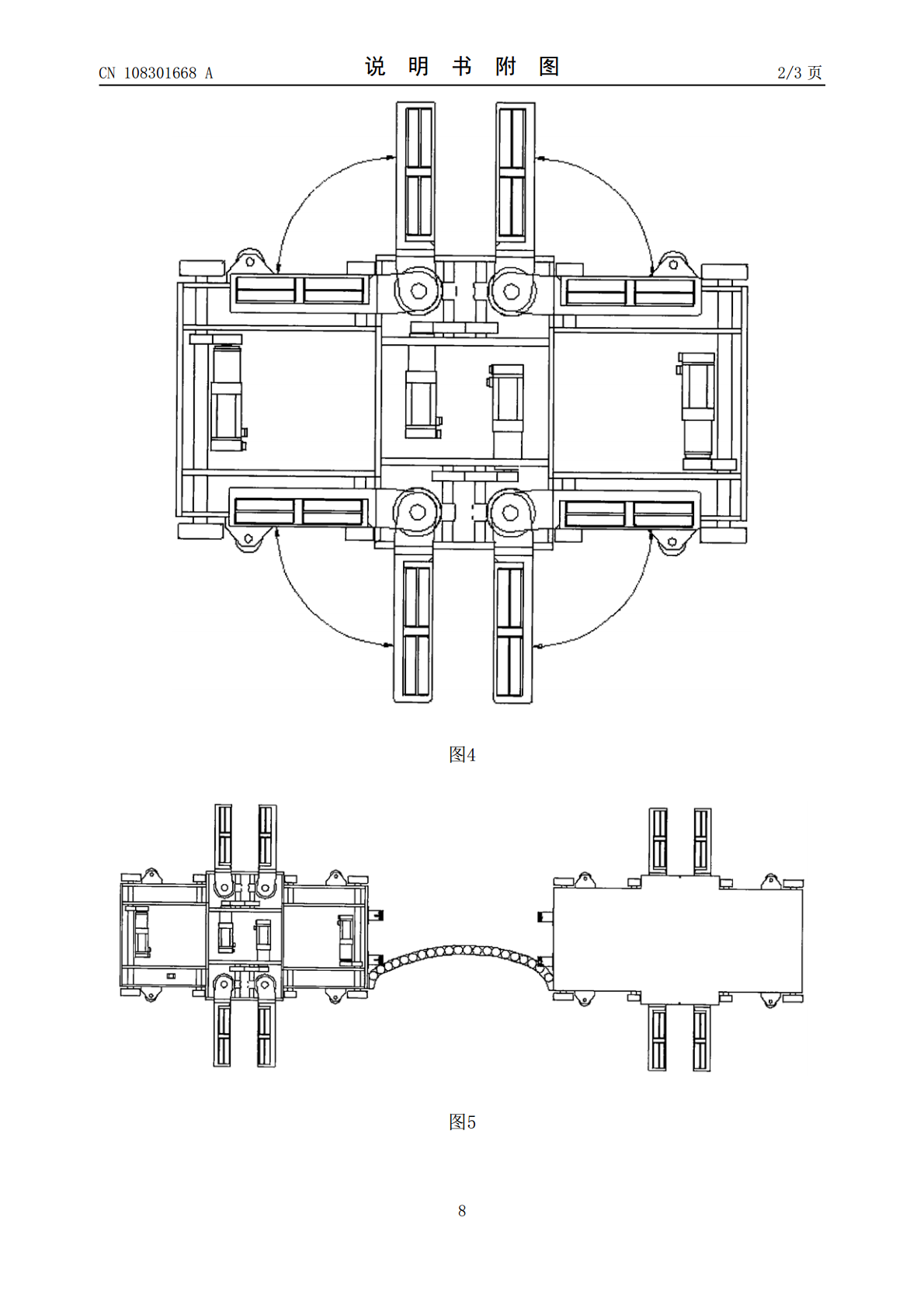
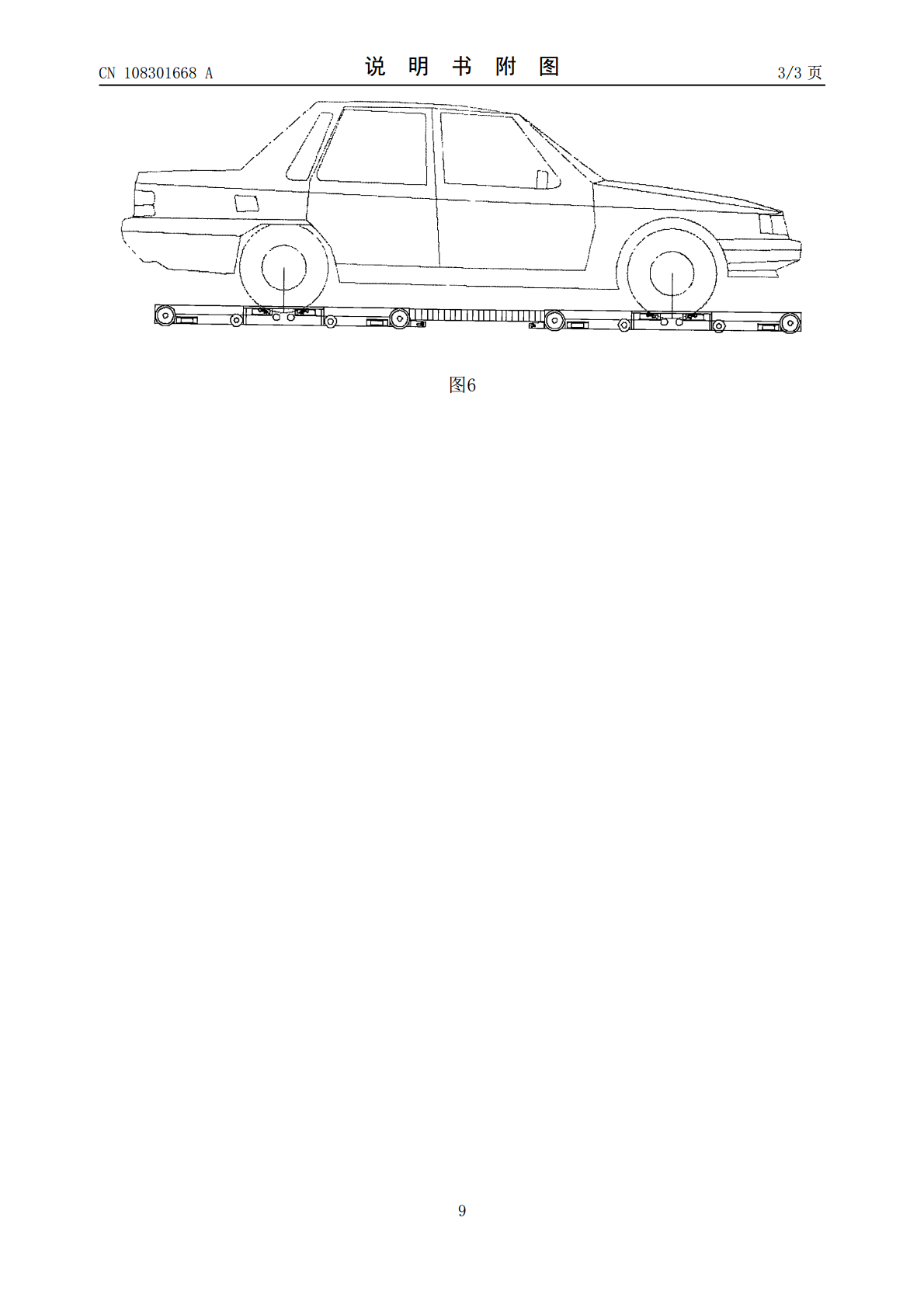
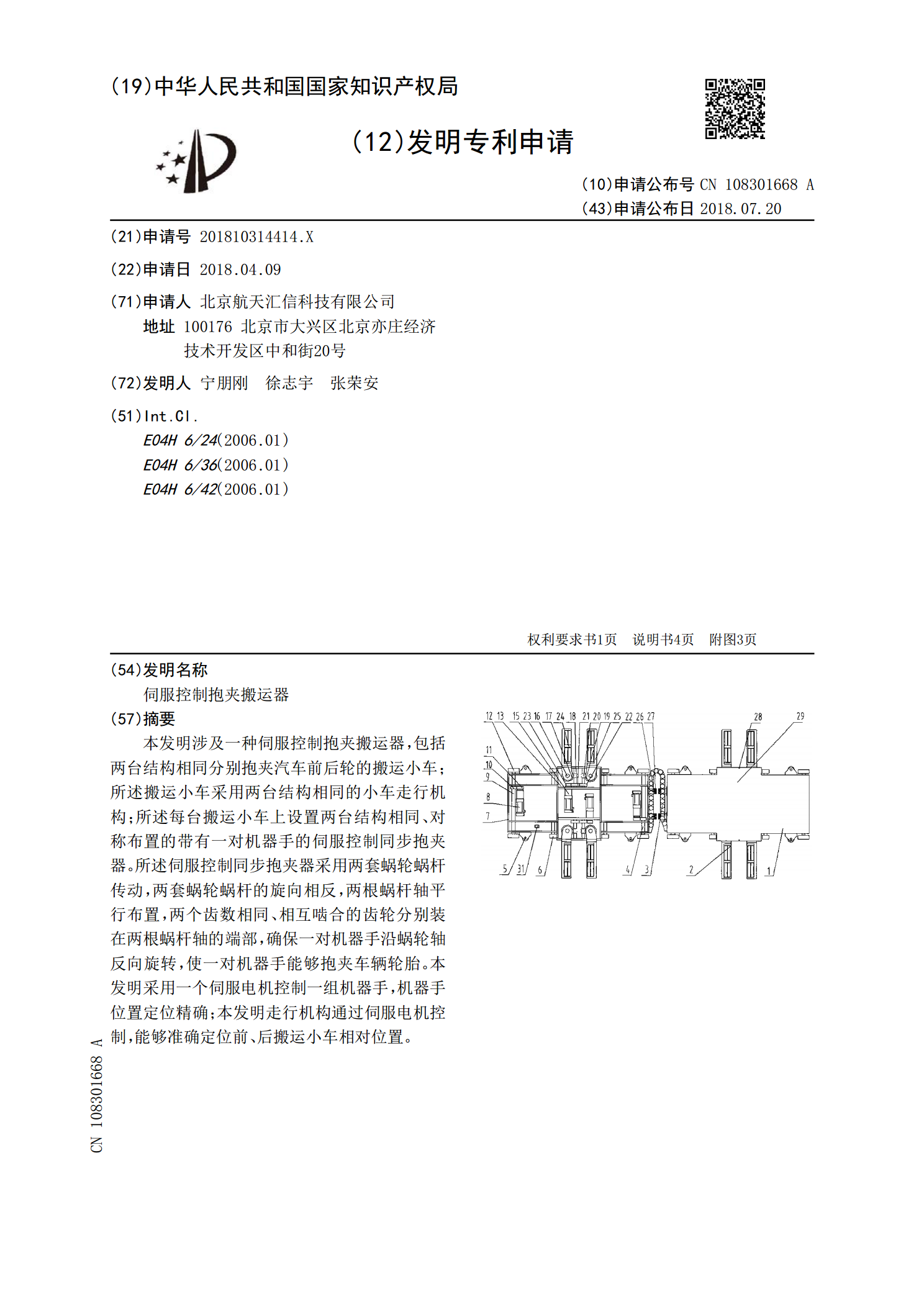
本发明涉及一种伺服控制抱夹搬运器,包括两台结构相同分别抱夹汽车前后轮的搬运小车;所述搬运小车采用两台结构相同的小车走行机构;所述每台搬运小车上设置两台结构相同、对称布置的带有一对机器手的伺服控制同步抱夹器。所述伺服控制同步抱夹器采用两套蜗轮蜗杆传动,两套蜗轮蜗杆的旋向相反,两根蜗杆轴平行布置,两个齿数相同、相互啮合的齿轮分别装在两根蜗杆轴的端部,确保一对机器手沿蜗轮轴反向旋转,使一对机器手能够抱夹车辆轮胎。本发明采用一个伺服电机控制一组机器手,机器手位置定位精确;本发明走行机构通过伺服电机控制,能够准确定

机器人抱夹搬运器.pdf
本发明涉及一种机器人抱夹搬运器,包括两台对称布置、结构相同分别抱夹汽车前轮和后轮的搬运小车,所述每台搬运小车上设置带有两对机器手的同步抱夹器,所述两台搬运小车以伸缩折臂连接,所述搬运小车内设电气定位系统检测汽车前后轮胎位置,所述搬运小车包括小车体、走行驱动电机减速器、链轮、链条、主动轮、主动轮轴、张紧轮、从动轮、导向机构;所述同步抱夹器包括与小车体连接的抱夹框架、上盖板、固定在上盖板上的抱夹电机减速器、蜗杆轴I、蜗杆轴II、蜗轮I、蜗轮II、主轴、机器手,每台抱夹电机减速器同时连接蜗杆轴I、蜗杆轴II,驱
扇形齿轮传动抱夹搬运器.pdf
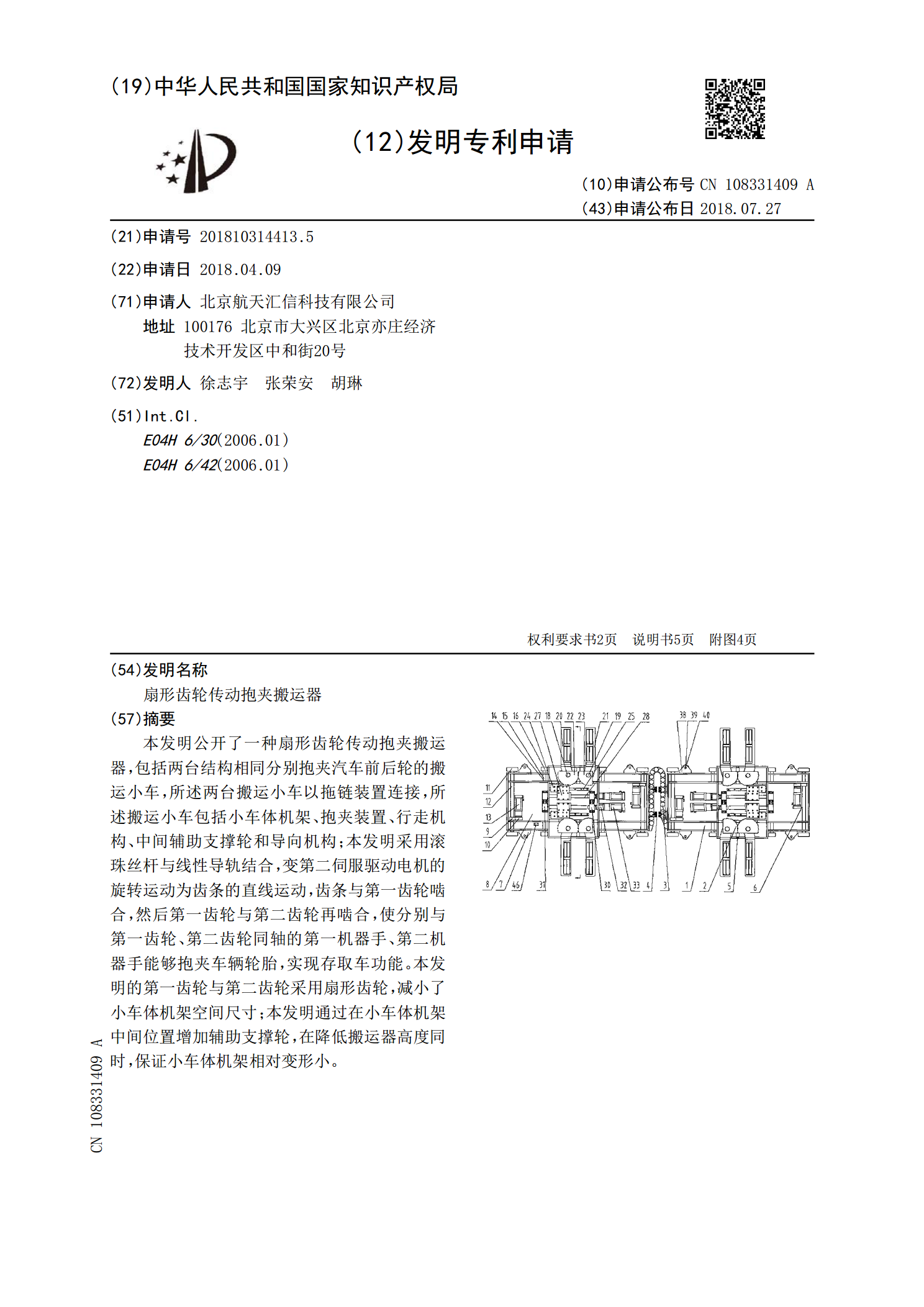
本发明公开了一种扇形齿轮传动抱夹搬运器,包括两台结构相同分别抱夹汽车前后轮的搬运小车,所述两台搬运小车以拖链装置连接,所述搬运小车包括小车体机架、抱夹装置、行走机构、中间辅助支撑轮和导向机构;本发明采用滚珠丝杆与线性导轨结合,变第二伺服驱动电机的旋转运动为齿条的直线运动,齿条与第一齿轮啮合,然后第一齿轮与第二齿轮再啮合,使分别与第一齿轮、第二齿轮同轴的第一机器手、第二机器手能够抱夹车辆轮胎,实现存取车功能。本发明的第一齿轮与第二齿轮采用扇形齿轮,减小了小车体机架空间尺寸;本发明通过在小车体机架中间位置增加
自抱夹提升式汽车搬运器.pdf
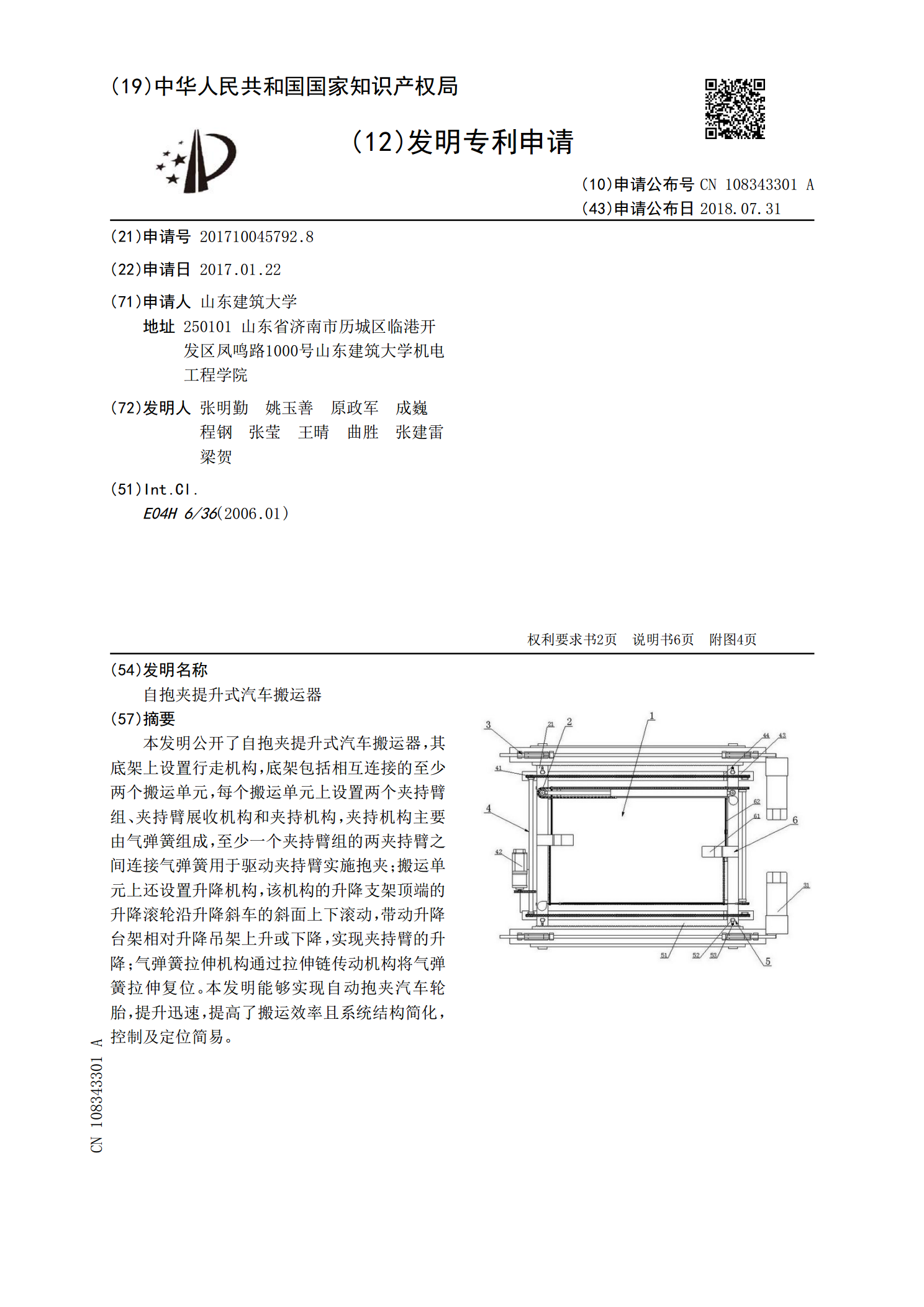
本发明公开了自抱夹提升式汽车搬运器,其底架上设置行走机构,底架包括相互连接的至少两个搬运单元,每个搬运单元上设置两个夹持臂组、夹持臂展收机构和夹持机构,夹持机构主要由气弹簧组成,至少一个夹持臂组的两夹持臂之间连接气弹簧用于驱动夹持臂实施抱夹;搬运单元上还设置升降机构,该机构的升降支架顶端的升降滚轮沿升降斜车的斜面上下滚动,带动升降台架相对升降吊架上升或下降,实现夹持臂的升降;气弹簧拉伸机构通过拉伸链传动机构将气弹簧拉伸复位。本发明能够实现自动抱夹汽车轮胎,提升迅速,提高了搬运效率且系统结构简化,控制及定位

一种抱夹轮式汽车搬运器.pdf
本发明公开了一种抱夹轮式汽车搬运器,包括两台前后连接且结构相同的第一搬运车和第二搬运车,第一搬运车和第二搬运车间通过设置曲臂相连接,所述第一搬运车包括车体机架、用于抱起汽车轮胎的抱夹机构和用于搬运汽车行走的行走机构;所述抱夹机构包括对称分布在车体机架两侧的两个抱夹部件,所述抱夹部件包括一对抱臂和连接抱臂的联动齿轮组,两个抱夹部件的联动齿轮组间设置联动齿条,联动齿条通过滚珠丝杆推动,滚珠丝杆连接抱臂驱动输出链轮并由抱臂驱动电机驱动。本发明齿轮齿条的抱臂驱动结构降低了车体机架的加工工艺,且稳定性较高;抱臂为同