
一种基于直线夹取机构的智能穿梭车.pdf

又珊****ck

1/10

2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于直线夹取机构的智能穿梭车.pdf
本发明公开了一种基于直线夹取机构的智能穿梭车,涉及物流设备技术领域,两个车体对称安装于车体安装架上,车体两侧安装行走机构,并通过行走机构安装于行走轨道上,两个穿梭车机架板分别安装于两个车体上,两个一次伸叉板分别安装于两个穿梭车机架板上,两个二次伸叉板分别安装于两个一次伸叉板上,动力机构安装于车体上,直线夹取机构通过无铁芯永磁同步直线电机滑块和无铁芯永磁同步直线电机导轨安装于两个二次伸叉板顶部。本发明采用轮毂电机驱动,减少了传动原件,减轻了车体重量,保证驱动稳定性及可靠性的同时,最大限度节省空间;采用直线夹
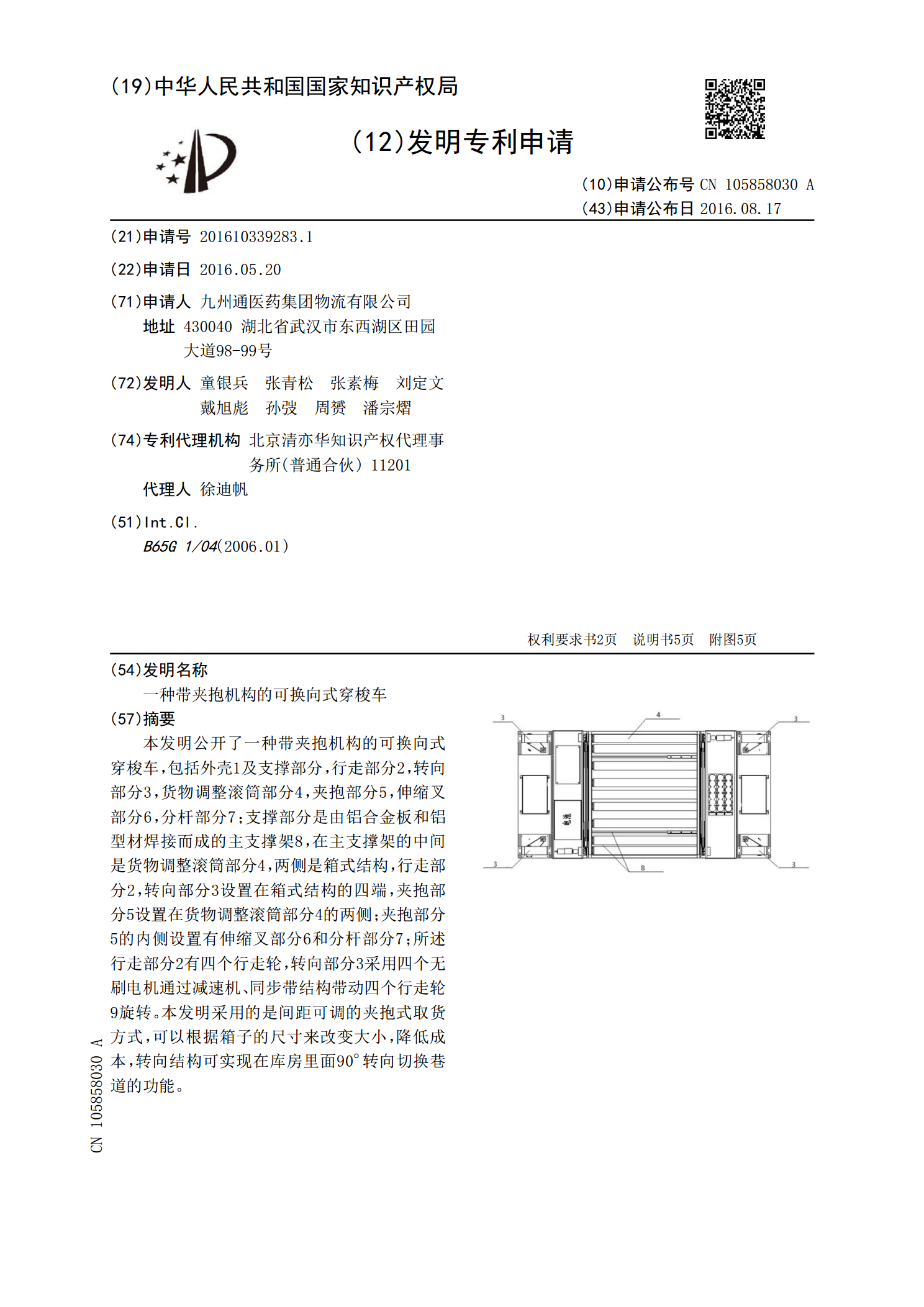
一种带夹抱机构的可换向式穿梭车.pdf
本发明公开了一种带夹抱机构的可换向式穿梭车,包括外壳1及支撑部分,行走部分2,转向部分3,货物调整滚筒部分4,夹抱部分5,伸缩叉部分6,分杆部分7;支撑部分是由铝合金板和铝型材焊接而成的主支撑架8,在主支撑架的中间是货物调整滚筒部分4,两侧是箱式结构,行走部分2,转向部分3设置在箱式结构的四端,夹抱部分5设置在货物调整滚筒部分4的两侧;夹抱部分5的内侧设置有伸缩叉部分6和分杆部分7;所述行走部分2有四个行走轮,转向部分3采用四个无刷电机通过减速机、同步带结构带动四个行走轮9旋转。本发明采用的是间距可调的夹

一种智能穿梭车.pdf
本实用新型涉及物流领域,尤其涉及一种智能穿梭车,包括穿梭车本体,穿梭车本体的上表面固定有加强板,加强板的上表面设有若干个长条形凹槽,该智能穿梭车通过在穿梭车本体上固定加强板,这样在运输重型货物的时候可以对穿梭车本体的顶板起到保护作用,避免其被磨损、压变形而对穿梭车本体内部的驱动装置、零部件等造成损坏;另外通过在加强板的上表面设置长条形凹槽,这样与货物托盘的底面相适配,使得托盘底面凸出的长条正好卡进长条形凹槽中,这样即使大型货物在运输的过程中向侧边倾斜也不会使得托盘从智能穿梭车的上表面滑落,保证了运输过程中
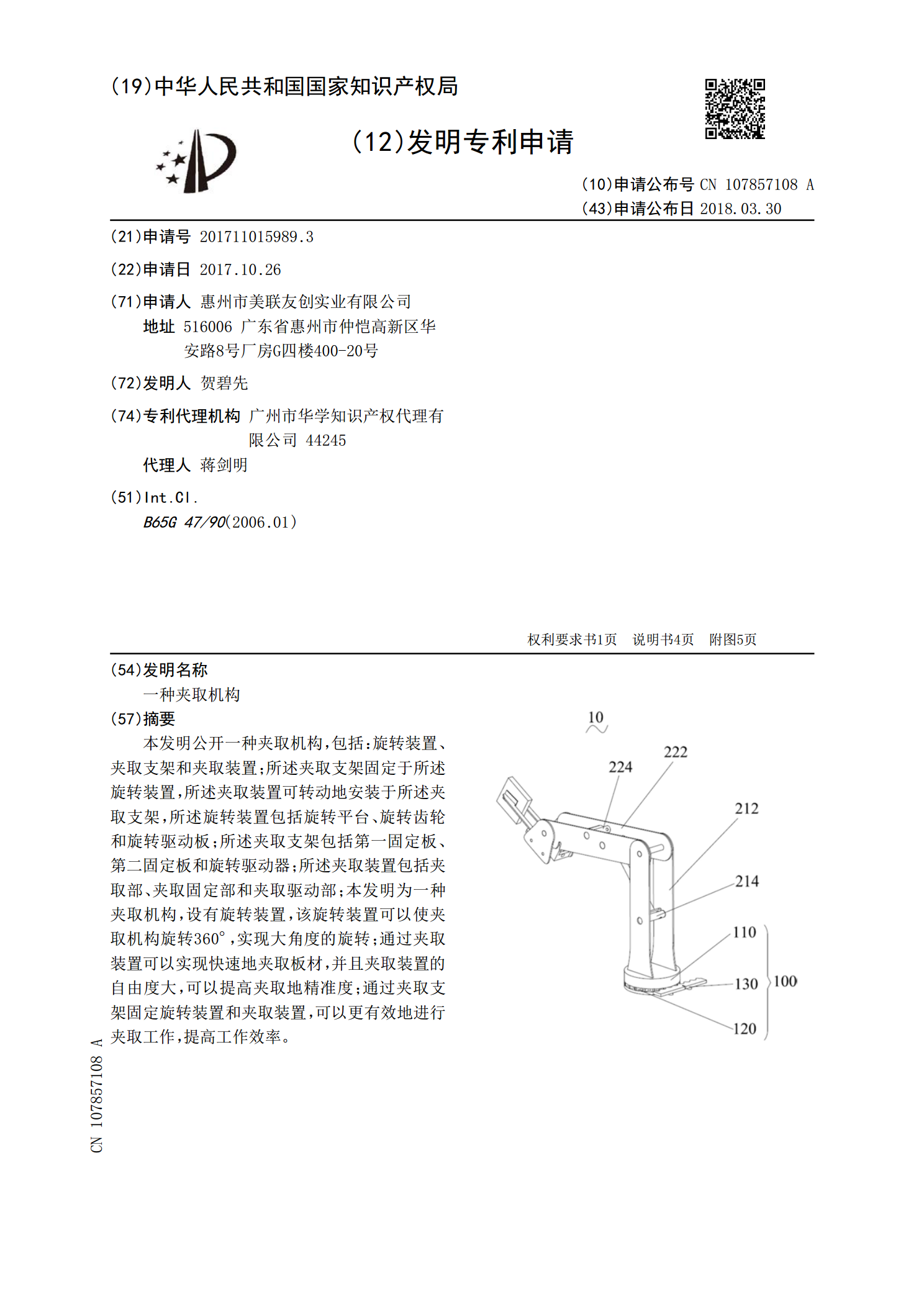
一种夹取机构.pdf
本发明公开一种夹取机构,包括:旋转装置、夹取支架和夹取装置;所述夹取支架固定于所述旋转装置,所述夹取装置可转动地安装于所述夹取支架,所述旋转装置包括旋转平台、旋转齿轮和旋转驱动板;所述夹取支架包括第一固定板、第二固定板和旋转驱动器;所述夹取装置包括夹取部、夹取固定部和夹取驱动部;本发明为一种夹取机构,设有旋转装置,该旋转装置可以使夹取机构旋转360°,实现大角度的旋转;通过夹取装置可以实现快速地夹取板材,并且夹取装置的自由度大,可以提高夹取地精准度;通过夹取支架固定旋转装置和夹取装置,可以更有效地进行夹取
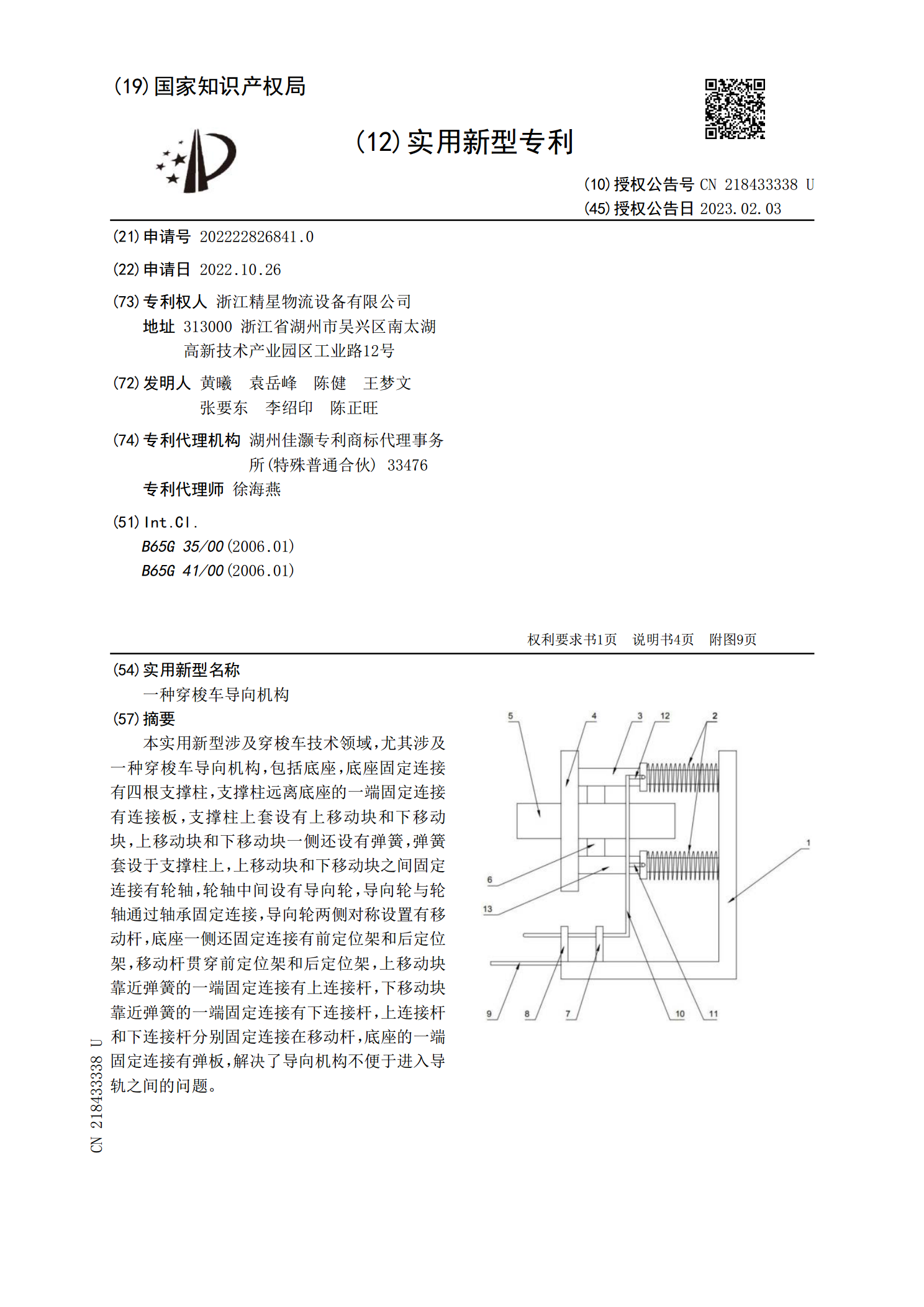
一种穿梭车导向机构.pdf
本实用新型涉及穿梭车技术领域,尤其涉及一种穿梭车导向机构,包括底座,底座固定连接有四根支撑柱,支撑柱远离底座的一端固定连接有连接板,支撑柱上套设有上移动块和下移动块,上移动块和下移动块一侧还设有弹簧,弹簧套设于支撑柱上,上移动块和下移动块之间固定连接有轮轴,轮轴中间设有导向轮,导向轮与轮轴通过轴承固定连接,导向轮两侧对称设置有移动杆,底座一侧还固定连接有前定位架和后定位架,移动杆贯穿前定位架和后定位架,上移动块靠近弹簧的一端固定连接有上连接杆,下移动块靠近弹簧的一端固定连接有下连接杆,上连接杆和下连接杆分