
一种五自由度高速并联机器人.pdf

努力****星驰

1/10
2/10
3/10

4/10
5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种五自由度高速并联机器人.pdf
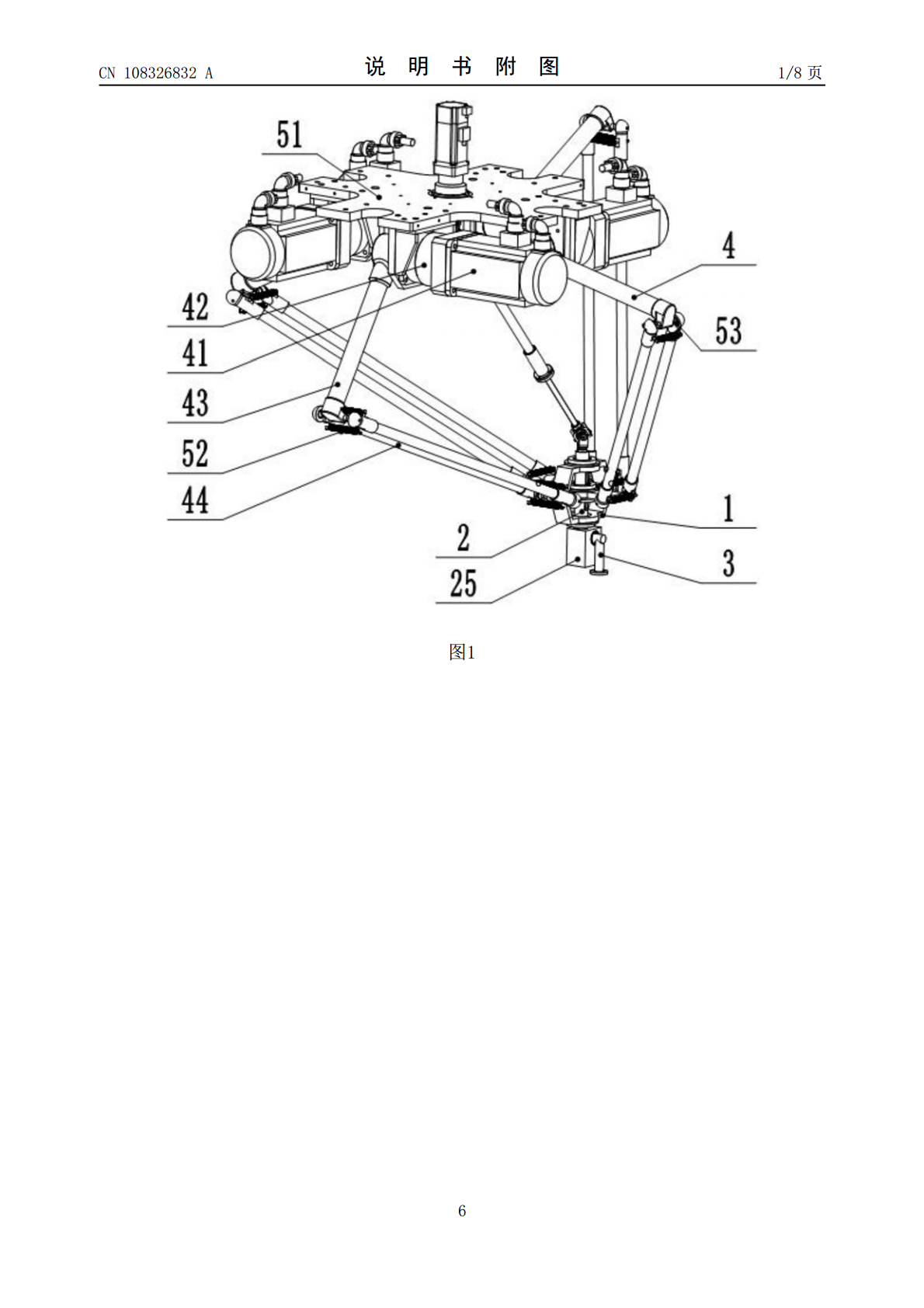
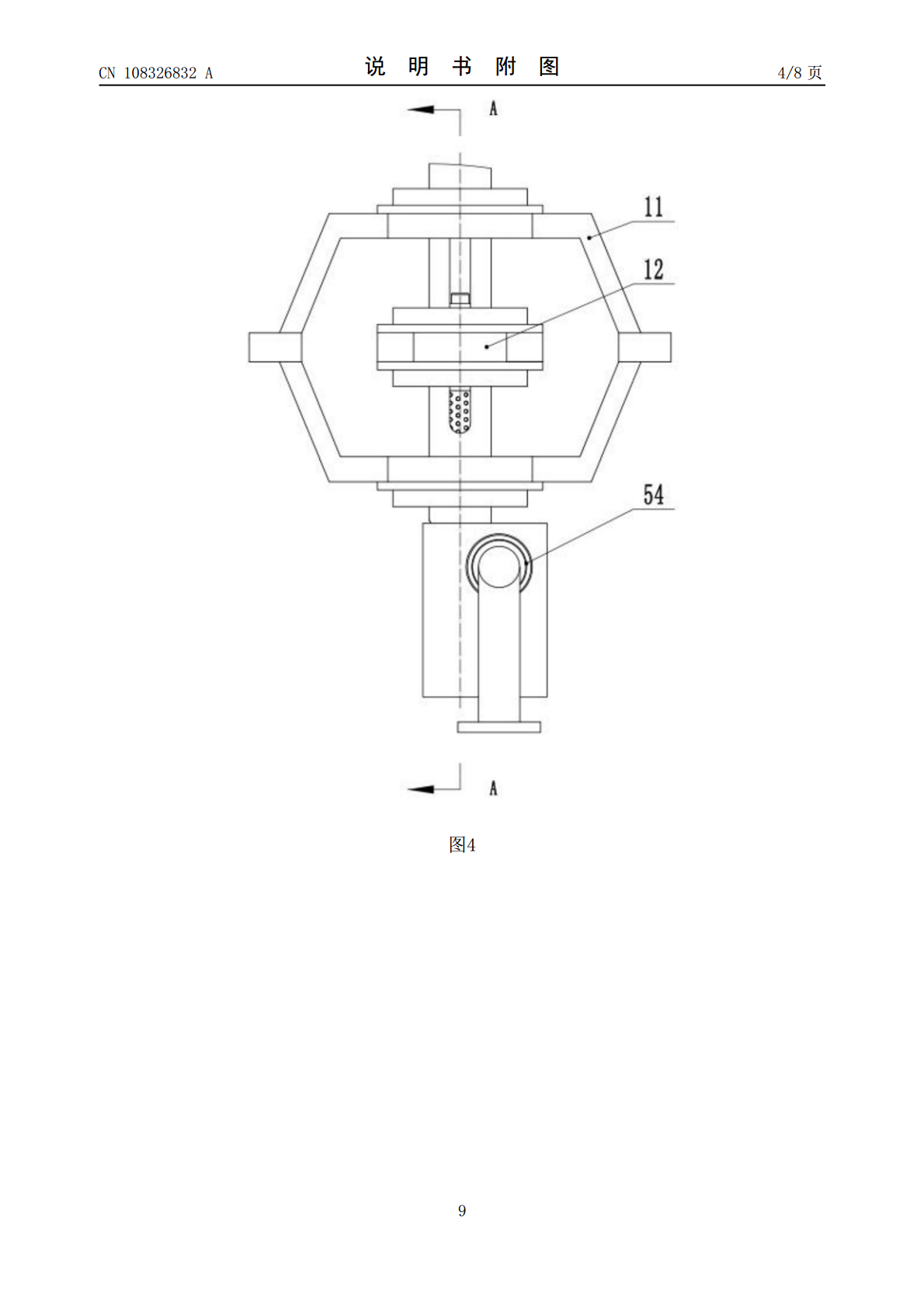
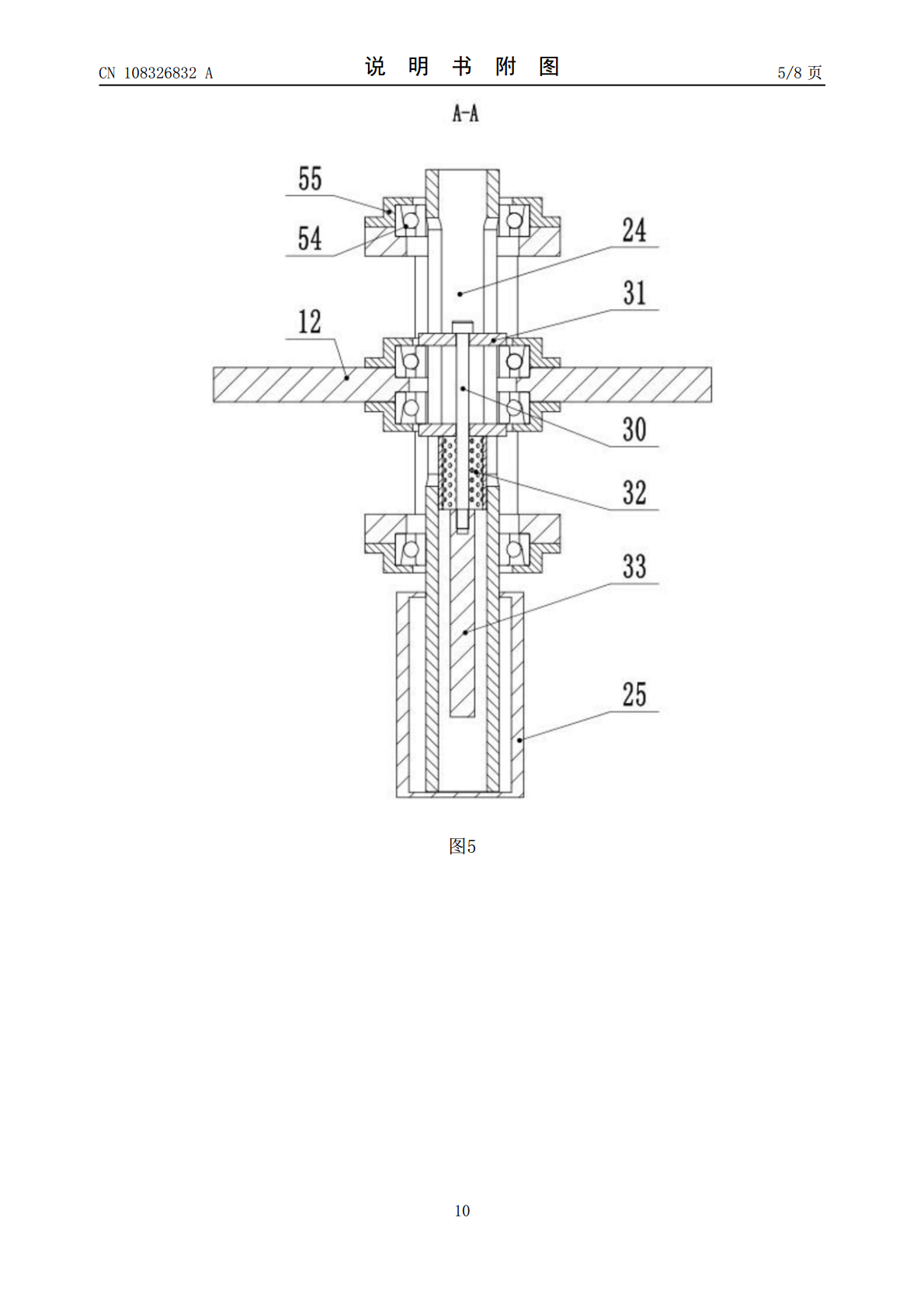
一种五自由度高速并联机器人,包括静平台51、动平台部件1、第四轴部件2、第五轴部件3、四臂机构4;所述的动平台部件1包括动平台Ⅰ11、动平台Ⅱ12;所述的第四轴部件2包括主电机21、万向联轴节23和空心轴24;所述的第五轴部件3包括螺栓30、压板31、滚珠衬套32、齿条33、滑块35,导轨34,齿轮36,摆动轴37,齿条33和摆动轴37上固定的齿轮36相啮合;所述的四臂机构4包括副电机41以及上臂43、下臂44,本发明所述的高速并联机器人具有五个自由度,具有灵巧性高,成本低,结构简单、可靠性高、工作空间大

一种新型4自由度高速并联机器人设计方法.docx
一种新型4自由度高速并联机器人设计方法标题:一种新型4自由度高速并联机器人设计方法摘要:本论文提出了一种新型的4自由度高速并联机器人设计方法,该方法以提高机器人运动效率和精度为目标,结合机器人动力学建模与最优化设计技术,对机器人结构进行优化设计。本文首先介绍了并联机器人的基本概念和分类,然后详细阐述了新型4自由度高速并联机器人的设计方法及关键技术,最后通过仿真实验验证了该设计方法的有效性和性能优势。关键词:4自由度高速并联机器人,设计方法,动力学建模,最优化设计,仿真实验一、引言并联机器人是一类具有多个并

四自由度高速并联机器人的研究.docx
四自由度高速并联机器人的研究四自由度高速并联机器人的研究摘要:高速并联机器人是一种具有广泛应用前景的机器人系统,其具有快速、高精度和高可靠性的特点。本论文研究了四自由度高速并联机器人的相关技术,包括结构设计、运动控制和应用领域。通过理论分析和仿真实验,验证了该机器人的性能和优势。研究结果表明,四自由度高速并联机器人具有较好的动态响应和工作稳定性,在汽车装配、物料搬运和医疗手术等领域具有广泛的应用前景。1.引言高速并联机器人是一种具有多自由度的多关节机器人,其能够完成快速、高精度和高可靠性的运动控制任务。随

四自由度高速并联机器人的研究.docx
四自由度高速并联机器人的研究四自由度高速并联机器人的研究摘要:高速并联机器人是一种运动精度高、速度快、稳定性好的机器人,被广泛应用于航空、汽车、机器人等领域。本文以四自由度高速并联机器人为研究对象,介绍了其结构、运动学和动力学模型,并讨论了其在工业领域中的应用。关键词:高速并联机器人;四自由度;运动学;动力学;应用一、引言随着科技的不断进步,越来越多的领域开始使用机器人作为生产工具。高速并联机器人是一种结构紧凑、推力大、运动精度高、速度快、稳定性好的机器人,被广泛应用于航空、汽车、机器人等领域。本文以四自

一种高速五自由度并联机械手.pdf
本发明公开了一种高速五自由度并联机械手,包括固定架、动平台、两自由度手腕以及布置在固定架与动平台之间的五条结构相同的支链,五条结构相同的支链带动动平台产生三维平动运动;动平台包括一个中心板、两组分角齿轮组、四个连杆和一个固定连杆;固定连杆和上述四个连杆在中心板上呈径向均布,固定连杆的一端与中心板固接,四个连杆的一端分别与两组分角齿轮组中的分角锥齿轮的转动轴固接,通过两组分角齿轮组与中心锥齿轮的啮合作用,将运动传递给两自由度手腕,从而产生两自由度可控转动。本发明结构对称,受力均匀,运动部件质量小,动态性能较