
四自由度高速并联机器人的研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

四自由度高速并联机器人的研究.docx
四自由度高速并联机器人的研究四自由度高速并联机器人的研究摘要:高速并联机器人是一种运动精度高、速度快、稳定性好的机器人,被广泛应用于航空、汽车、机器人等领域。本文以四自由度高速并联机器人为研究对象,介绍了其结构、运动学和动力学模型,并讨论了其在工业领域中的应用。关键词:高速并联机器人;四自由度;运动学;动力学;应用一、引言随着科技的不断进步,越来越多的领域开始使用机器人作为生产工具。高速并联机器人是一种结构紧凑、推力大、运动精度高、速度快、稳定性好的机器人,被广泛应用于航空、汽车、机器人等领域。本文以四自

四自由度高速并联机器人的研究.docx
四自由度高速并联机器人的研究四自由度高速并联机器人的研究摘要:高速并联机器人是一种具有广泛应用前景的机器人系统,其具有快速、高精度和高可靠性的特点。本论文研究了四自由度高速并联机器人的相关技术,包括结构设计、运动控制和应用领域。通过理论分析和仿真实验,验证了该机器人的性能和优势。研究结果表明,四自由度高速并联机器人具有较好的动态响应和工作稳定性,在汽车装配、物料搬运和医疗手术等领域具有广泛的应用前景。1.引言高速并联机器人是一种具有多自由度的多关节机器人,其能够完成快速、高精度和高可靠性的运动控制任务。随
一种五自由度高速并联机器人.pdf
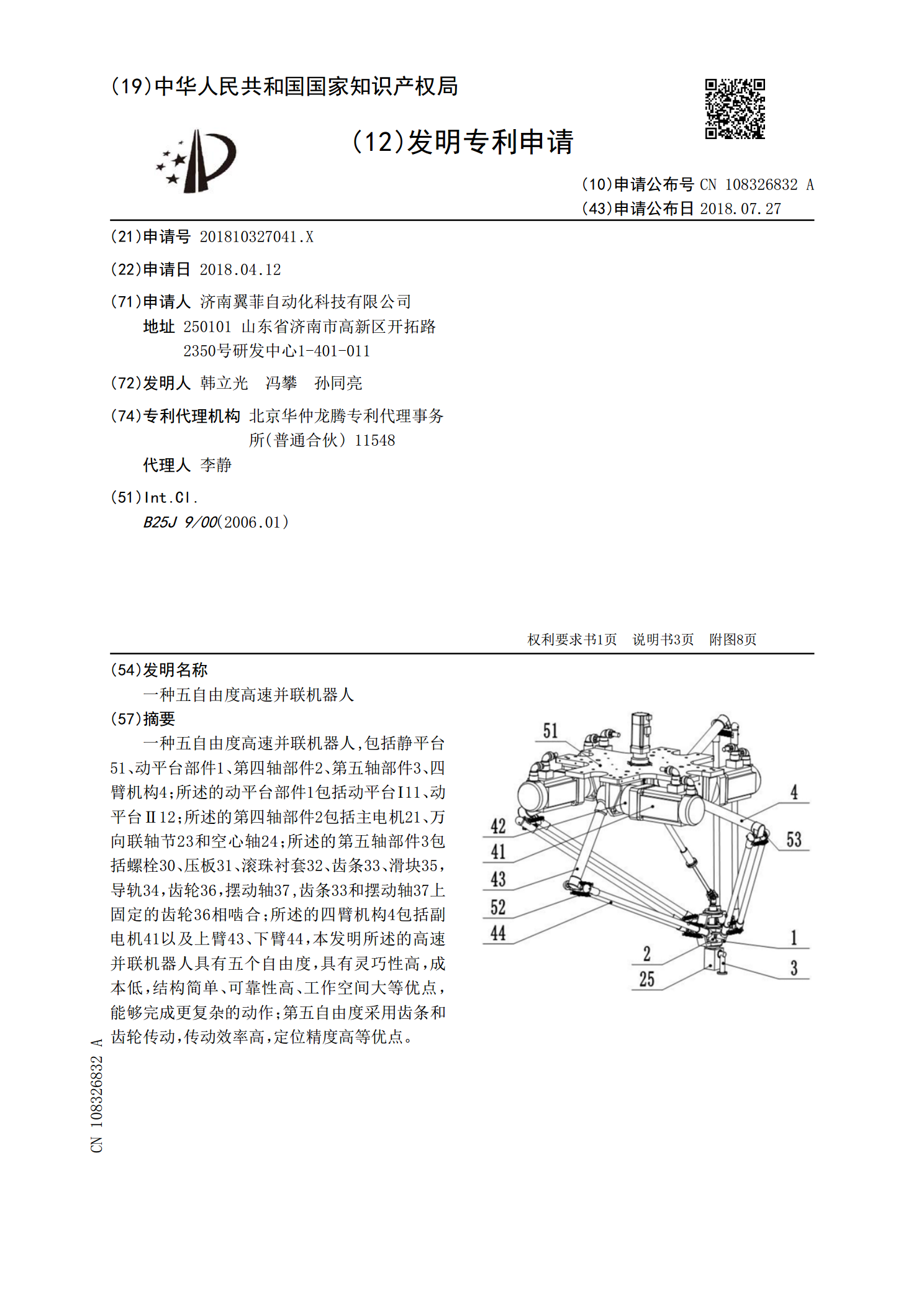
一种五自由度高速并联机器人,包括静平台51、动平台部件1、第四轴部件2、第五轴部件3、四臂机构4;所述的动平台部件1包括动平台Ⅰ11、动平台Ⅱ12;所述的第四轴部件2包括主电机21、万向联轴节23和空心轴24;所述的第五轴部件3包括螺栓30、压板31、滚珠衬套32、齿条33、滑块35,导轨34,齿轮36,摆动轴37,齿条33和摆动轴37上固定的齿轮36相啮合;所述的四臂机构4包括副电机41以及上臂43、下臂44,本发明所述的高速并联机器人具有五个自由度,具有灵巧性高,成本低,结构简单、可靠性高、工作空间大

四自由度高速并联机器人机构动力学分析与运动控制研究的任务书.docx
四自由度高速并联机器人机构动力学分析与运动控制研究的任务书任务书:1.研究背景高速机器人是现代产业中广泛应用的一种机器人系统,它的应用范围涵盖了许多领域,包括制造、自动化、医疗等。其中,四自由度高速并联机器人机构作为其中的重要一类,其具有速度快、定位精度高、负载大等优点,因此备受关注。目前,四自由度高速并联机器人机构的运动学和动力学分析、运动控制等方面的研究已经成为热点领域,而在实际应用中,其运动控制技术的研究仍然存在着许多问题和挑战。为解决以上问题,本研究团队将进行四自由度高速并联机器人机构的动力学分析

少自由度并联机器人构型特征研究.docx
少自由度并联机器人构型特征研究摘要:机器人学中并联机器人具有高刚度、高精度和高自由度等优点,因此在人类工程领域中得到了广泛的应用。然而,因为并联机器人的自由度过高,很难使机器人保持稳定,这为其应用带来了诸多问题。因此,构建少自由度的并联机器人,成为了解决这一问题的一个重要手段,本文对少自由度并联机器人的构型特征进行了研究。关键词:并联机器人;自由度;构型特征;稳定性一、绪论随着现代工业的飞速发展,机器人技术在生产制造中得到越来越广泛的应用。在机器人学中,多自由度并联机器人具有高刚度、高精度和高自由度等优点