
一种具有可移动式散热底座的码垛机器人.pdf

一吃****成益

1/8
2/8
3/8
4/8

5/8

6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种具有可移动式散热底座的码垛机器人.pdf
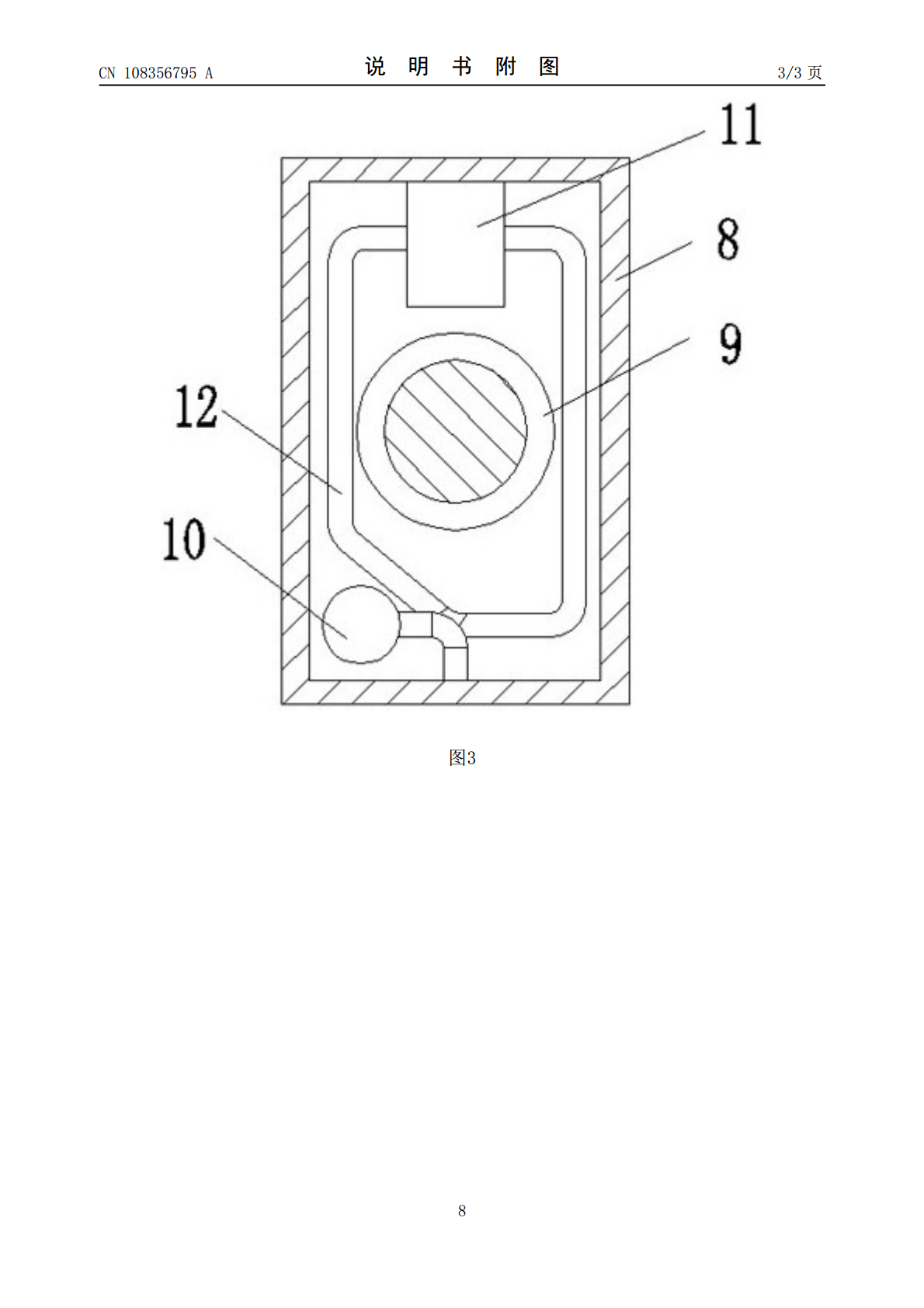
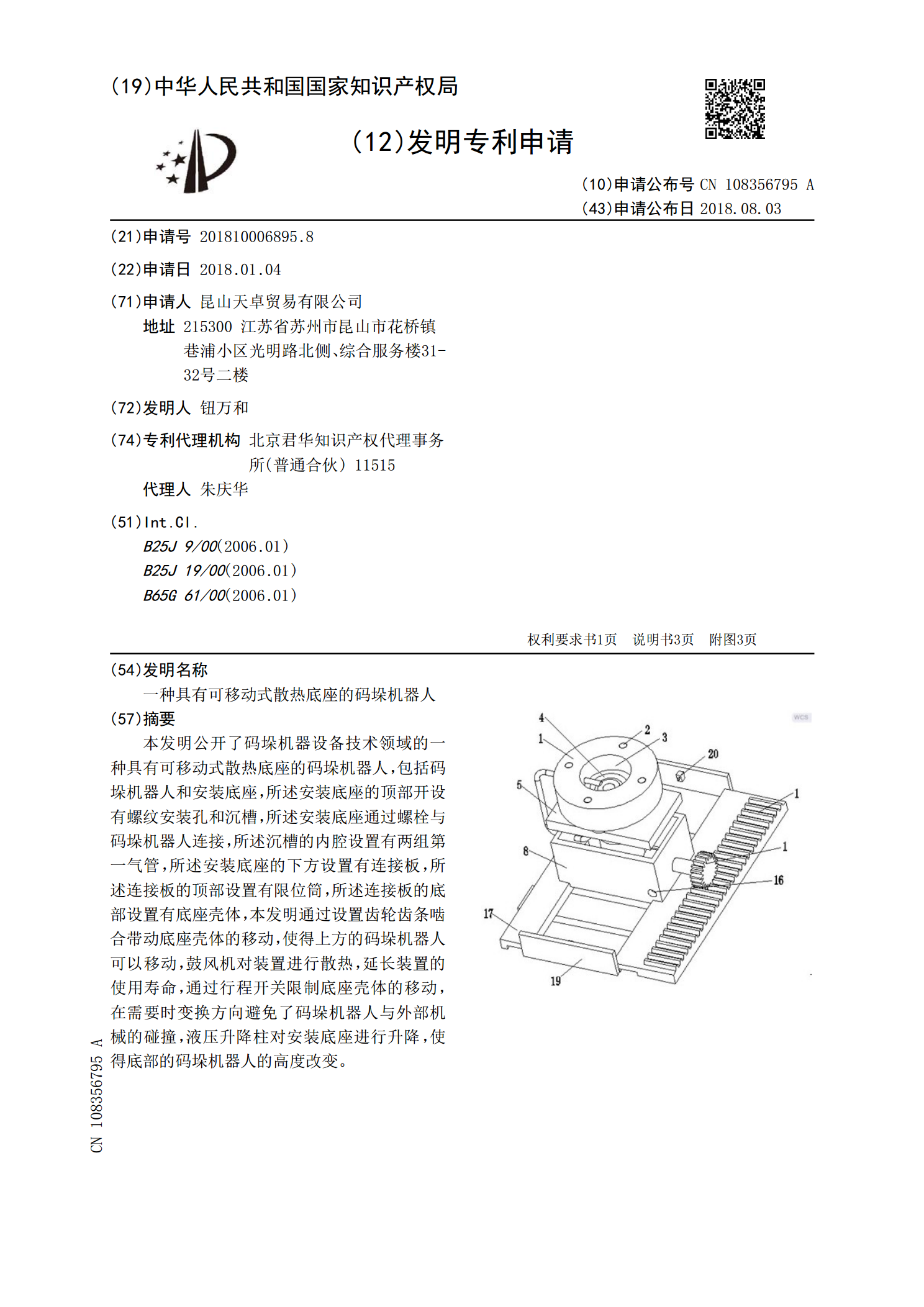
本发明公开了码垛机器设备技术领域的一种具有可移动式散热底座的码垛机器人,包括码垛机器人和安装底座,所述安装底座的顶部开设有螺纹安装孔和沉槽,所述安装底座通过螺栓与码垛机器人连接,所述沉槽的内腔设置有两组第一气管,所述安装底座的下方设置有连接板,所述连接板的顶部设置有限位筒,所述连接板的底部设置有底座壳体,本发明通过设置齿轮齿条啮合带动底座壳体的移动,使得上方的码垛机器人可以移动,鼓风机对装置进行散热,延长装置的使用寿命,通过行程开关限制底座壳体的移动,在需要时变换方向避免了码垛机器人与外部机械的碰撞,液压
一种具有除尘功能的机器人底部移动式底座.pdf
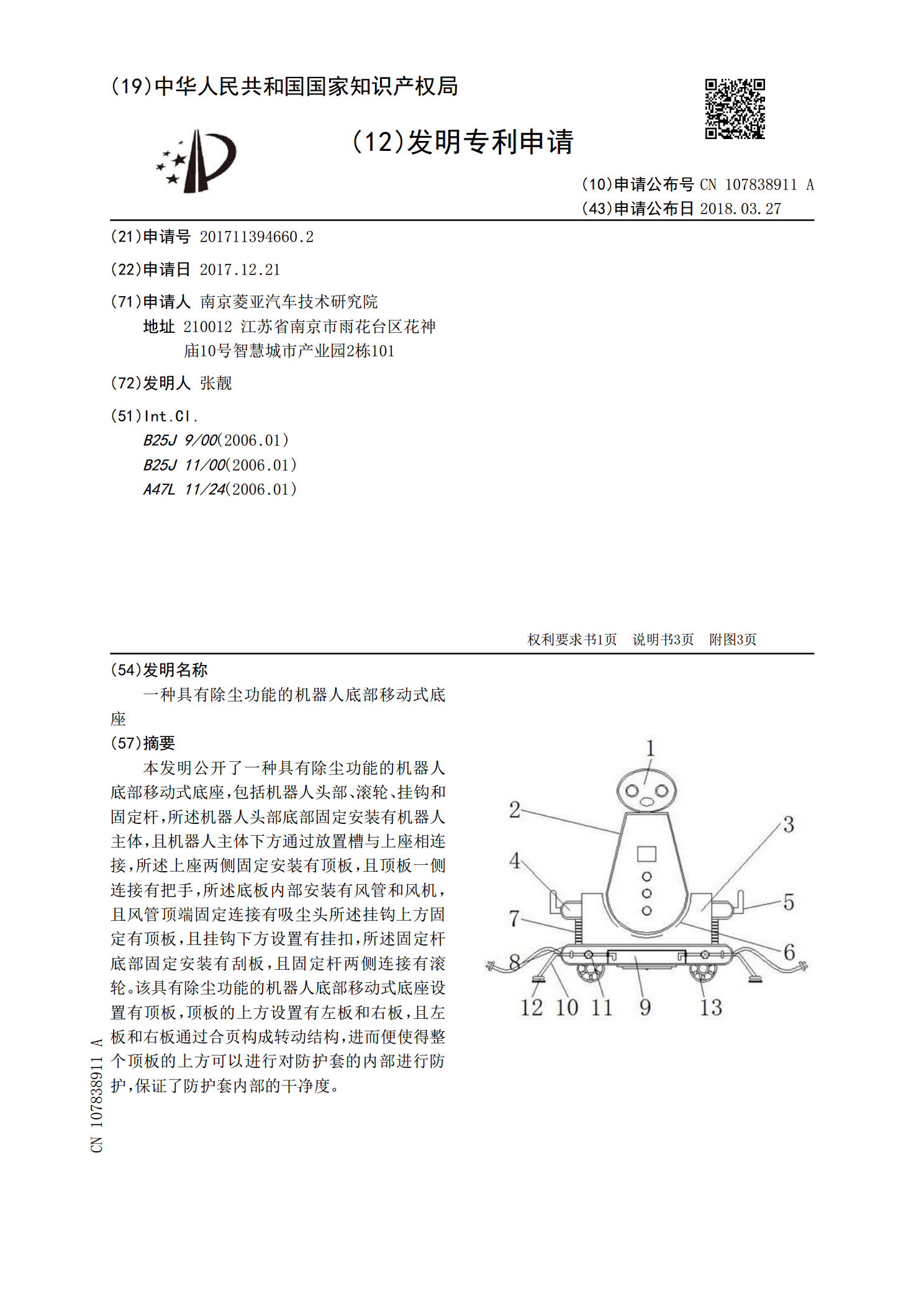
本发明公开了一种具有除尘功能的机器人底部移动式底座,包括机器人头部、滚轮、挂钩和固定杆,所述机器人头部底部固定安装有机器人主体,且机器人主体下方通过放置槽与上座相连接,所述上座两侧固定安装有顶板,且顶板一侧连接有把手,所述底板内部安装有风管和风机,且风管顶端固定连接有吸尘头所述挂钩上方固定有顶板,且挂钩下方设置有挂扣,所述固定杆底部固定安装有刮板,且固定杆两侧连接有滚轮。该具有除尘功能的机器人底部移动式底座设置有顶板,顶板的上方设置有左板和右板,且左板和右板通过合页构成转动结构,进而便使得整个顶板的上方可
一种机器人用可移动式安全防护底座.pdf
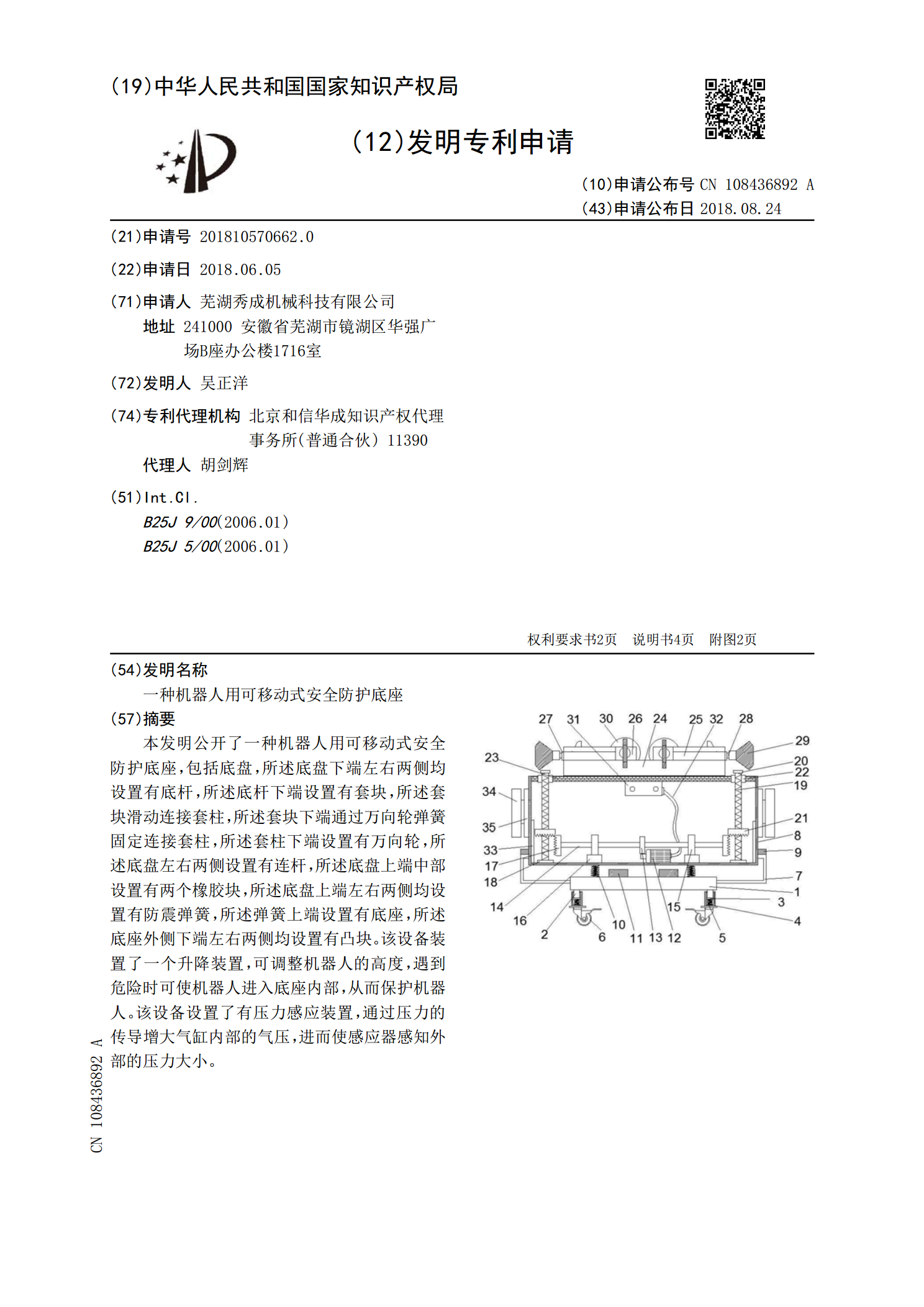
本发明公开了一种机器人用可移动式安全防护底座,包括底盘,所述底盘下端左右两侧均设置有底杆,所述底杆下端设置有套块,所述套块滑动连接套柱,所述套块下端通过万向轮弹簧固定连接套柱,所述套柱下端设置有万向轮,所述底盘左右两侧设置有连杆,所述底盘上端中部设置有两个橡胶块,所述底盘上端左右两侧均设置有防震弹簧,所述弹簧上端设置有底座,所述底座外侧下端左右两侧均设置有凸块。该设备装置了一个升降装置,可调整机器人的高度,遇到危险时可使机器人进入底座内部,从而保护机器人。该设备设置了有压力感应装置,通过压力的传导增大气缸

一种具有散热功能的可移动式高压开关柜.pdf
本发明公开了一种具有散热功能的可移动式高压开关柜,包括底板,底板上部设有底座,底座上部设有固定座,固定座上部设有开关柜本体,开关柜本体内设有支撑架,支撑架中部设有支撑板,支撑板上设有弹簧,开关柜本体顶部为顶腔,顶腔外侧装有警示板,顶腔内部设有控制室、电源室和电机室,电机室内装有电机,顶腔下方设有设有散热装置,散热装置包括散热扇叶、风扇轴和电机,本发明移动方便,操作简单,设置照明灯方便检修,能及时检测柜体内的温度和湿度,并通过设置的散热装置及时进行降温除湿,保证柜体工作的安全可靠性,节约能源,通风散热效果好
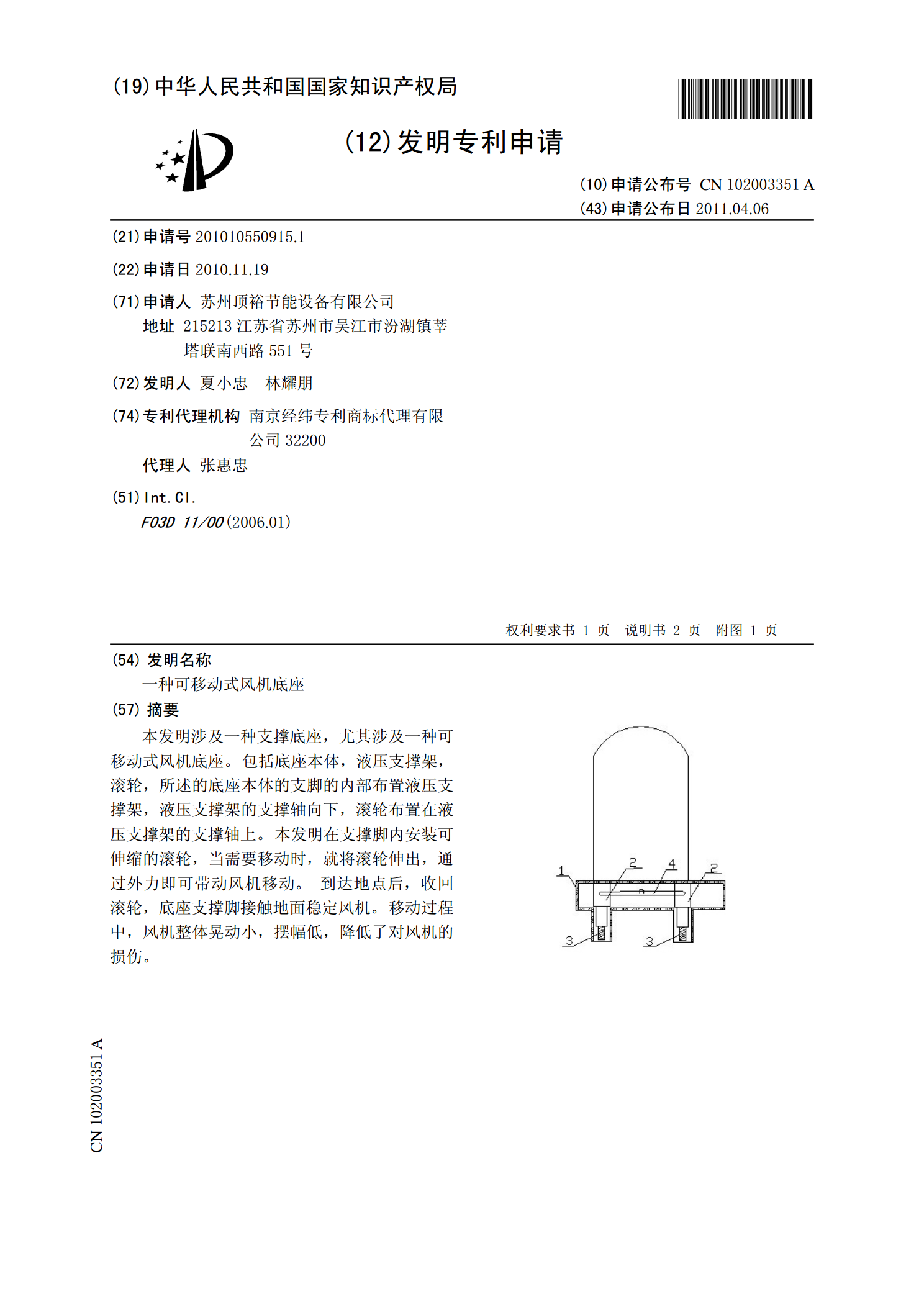
一种可移动式风机底座.pdf
本发明涉及一种支撑底座,尤其涉及一种可移动式风机底座。包括底座本体,液压支撑架,滚轮,所述的底座本体的支脚的内部布置液压支撑架,液压支撑架的支撑轴向下,滚轮布置在液压支撑架的支撑轴上。本发明在支撑脚内安装可伸缩的滚轮,当需要移动时,就将滚轮伸出,通过外力即可带动风机移动。到达地点后,收回滚轮,底座支撑脚接触地面稳定风机。移动过程中,风机整体晃动小,摆幅低,降低了对风机的损伤。