
一种节能单驱动三自由度机械臂.pdf

玄静****写意


1/8

2/8

3/8
4/8

5/8
6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种节能单驱动三自由度机械臂.pdf
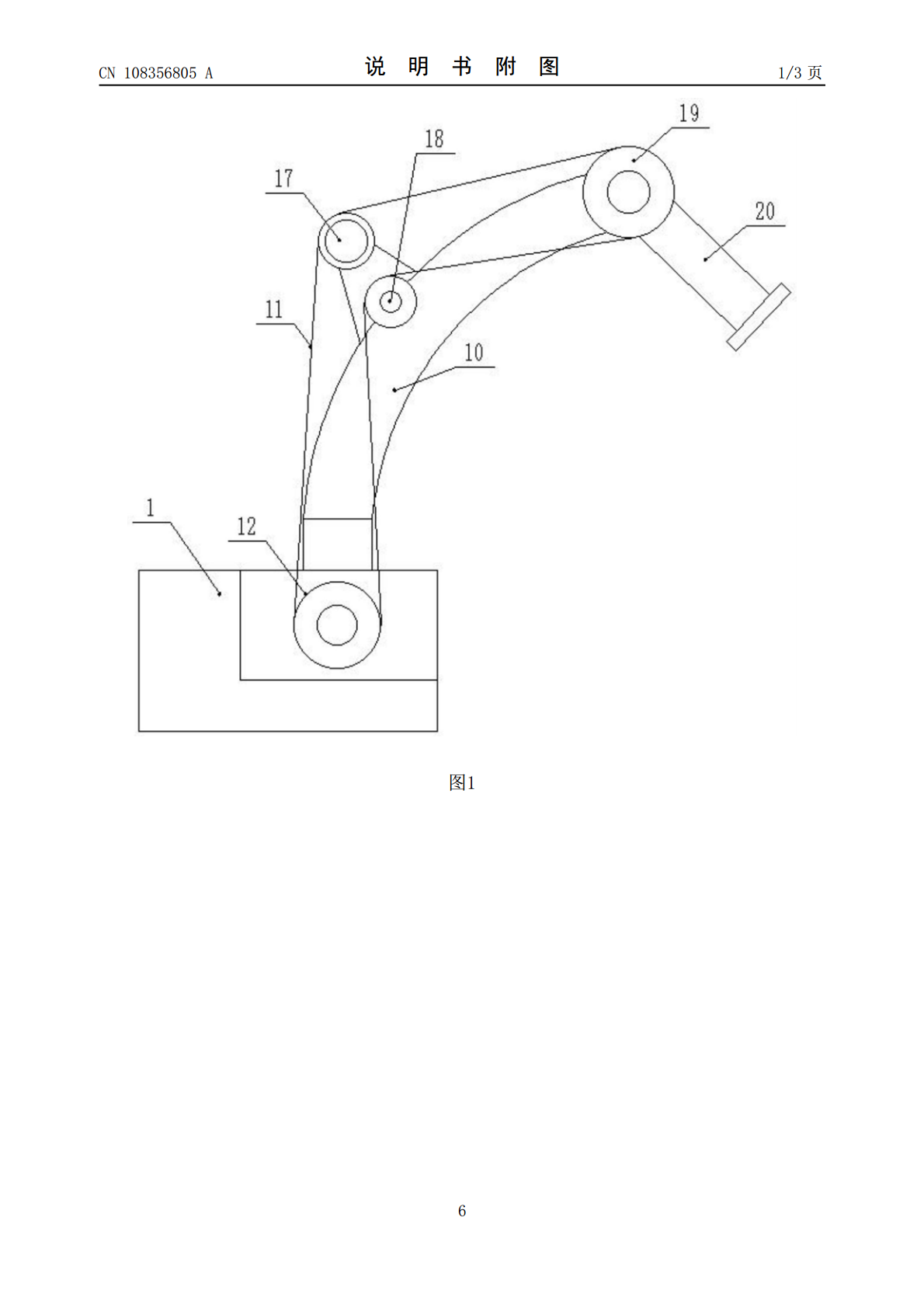
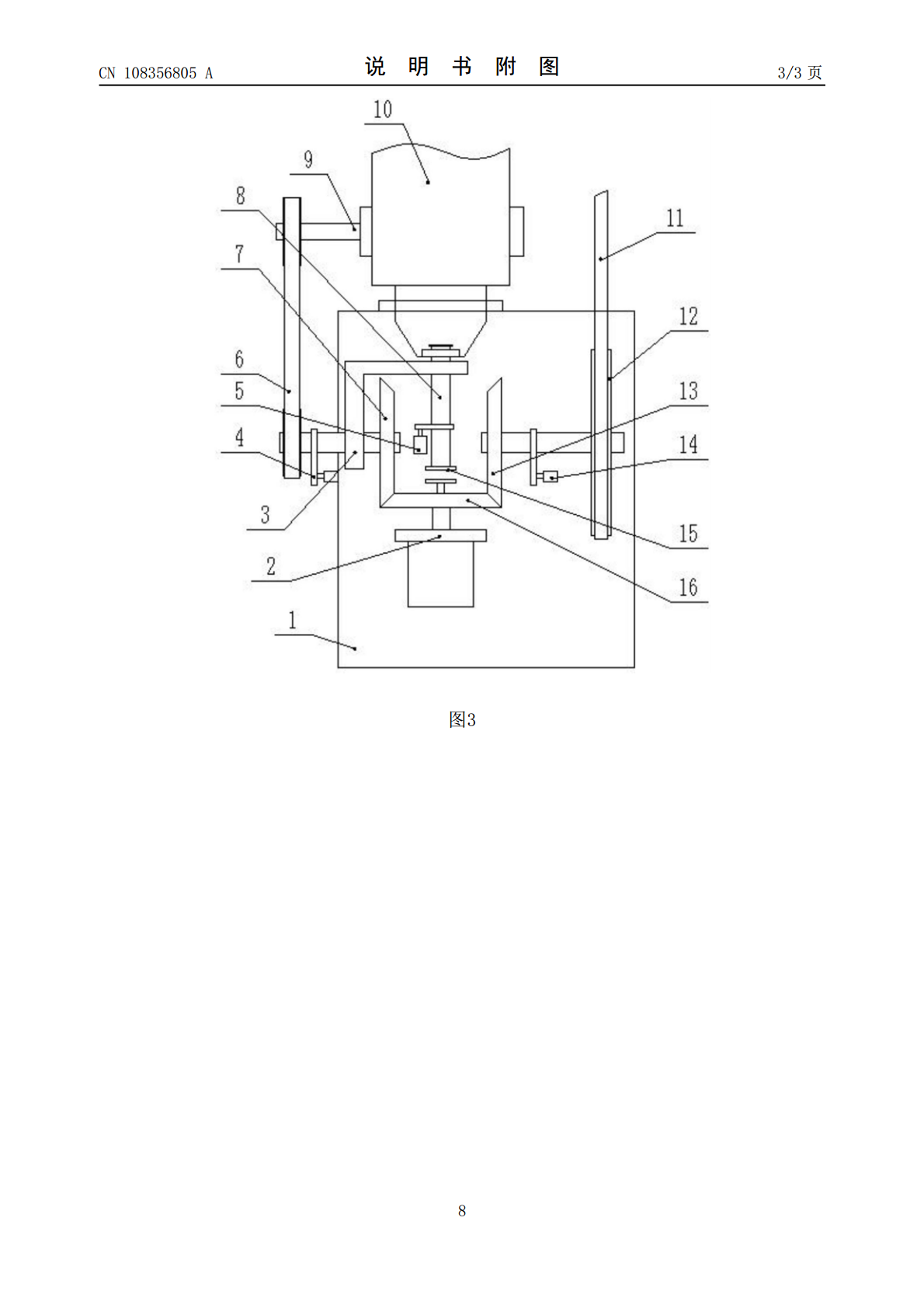
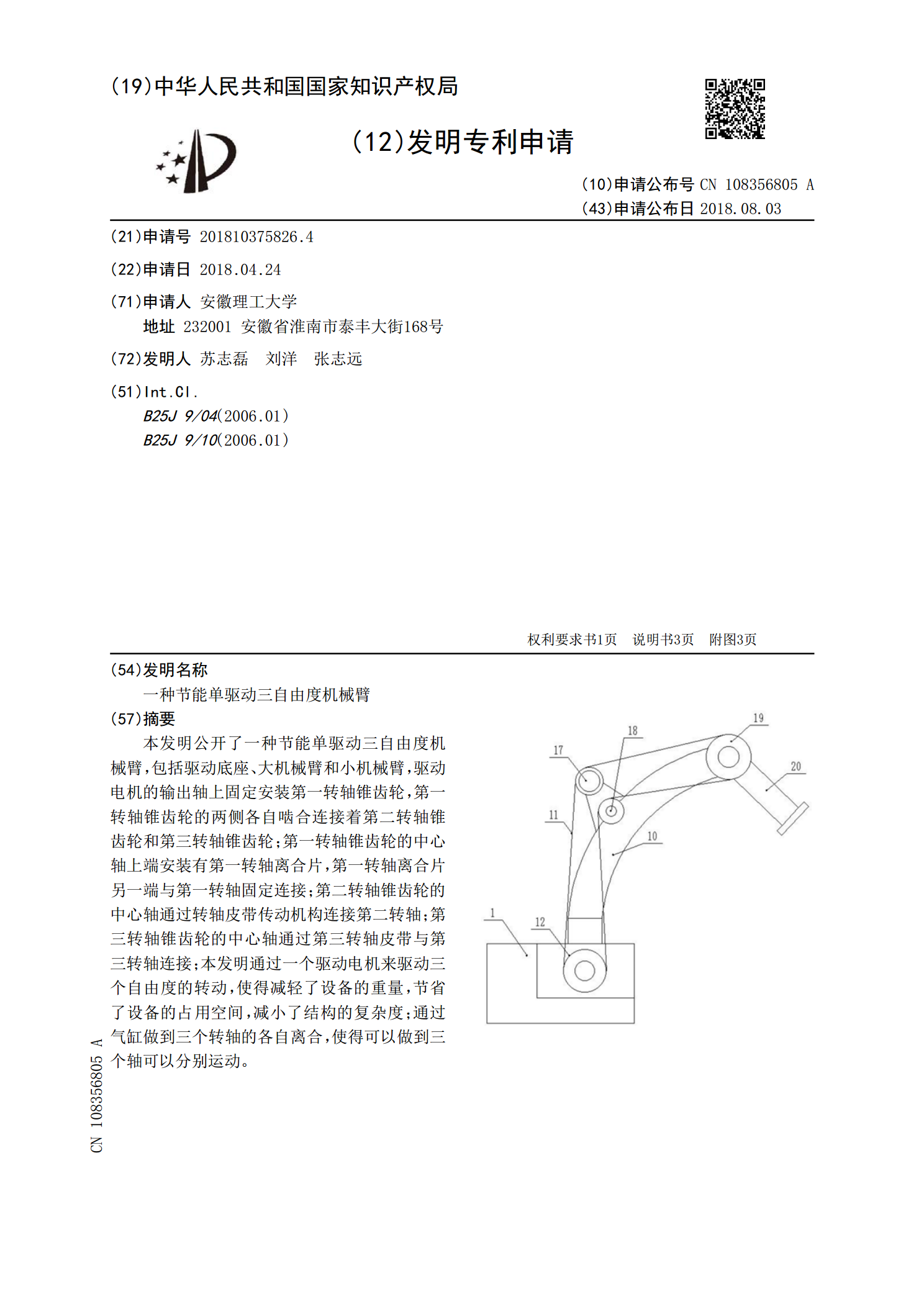
本发明公开了一种节能单驱动三自由度机械臂,包括驱动底座、大机械臂和小机械臂,驱动电机的输出轴上固定安装第一转轴锥齿轮,第一转轴锥齿轮的两侧各自啮合连接着第二转轴锥齿轮和第三转轴锥齿轮;第一转轴锥齿轮的中心轴上端安装有第一转轴离合片,第一转轴离合片另一端与第一转轴固定连接;第二转轴锥齿轮的中心轴通过转轴皮带传动机构连接第二转轴;第三转轴锥齿轮的中心轴通过第三转轴皮带与第三转轴连接;本发明通过一个驱动电机来驱动三个自由度的转动,使得减轻了设备的重量,节省了设备的占用空间,减小了结构的复杂度;通过气缸做到三个转
一种单自由度平面关节机械臂.pdf
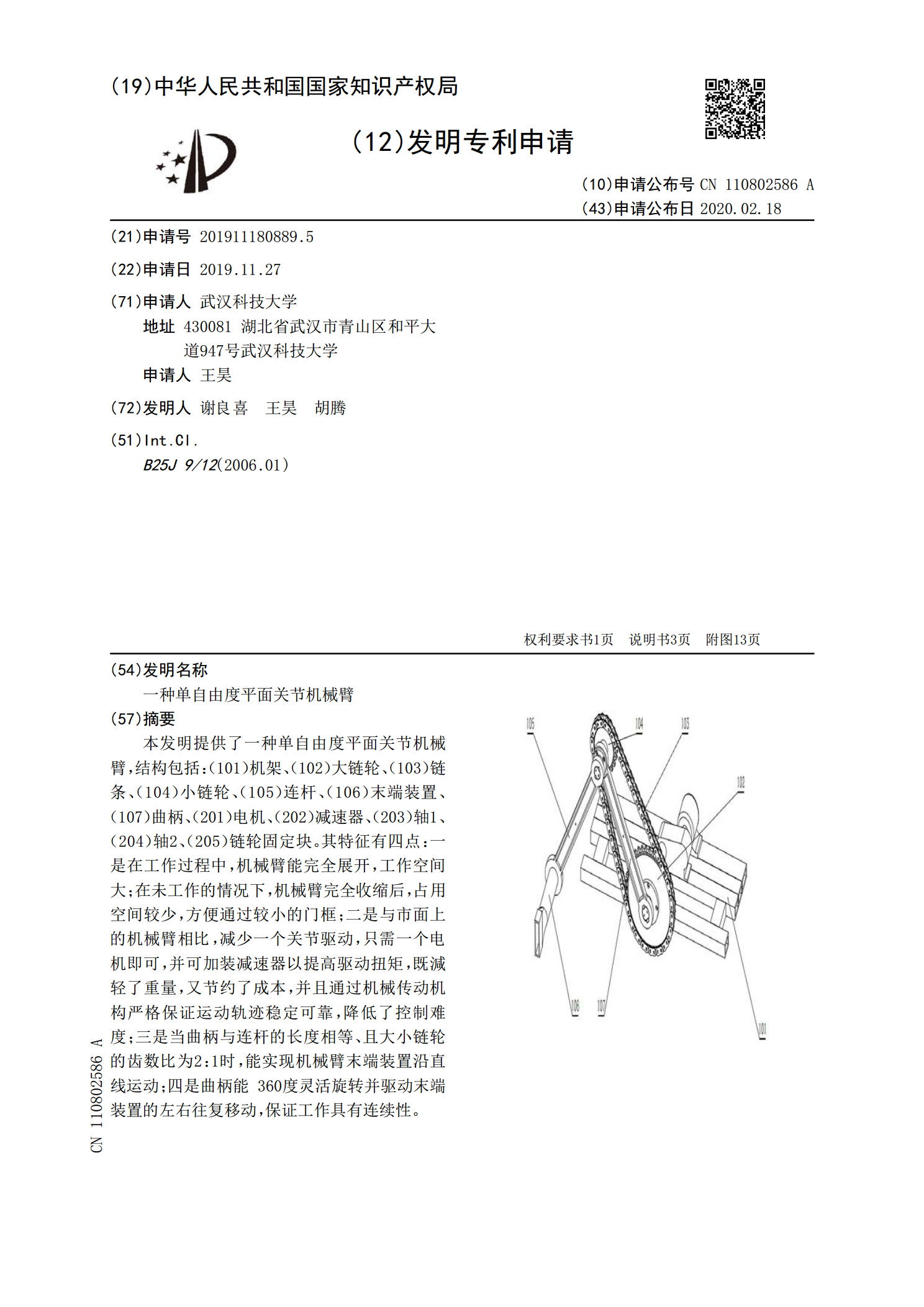
本发明提供了一种单自由度平面关节机械臂,结构包括:(101)机架、(102)大链轮、(103)链条、(104)小链轮、(105)连杆、(106)末端装置、(107)曲柄、(201)电机、(202)减速器、(203)轴1、(204)轴2、(205)链轮固定块。其特征有四点:一是在工作过程中,机械臂能完全展开,工作空间大;在未工作的情况下,机械臂完全收缩后,占用空间较少,方便通过较小的门框;二是与市面上的机械臂相比,减少一个关节驱动,只需一个电机即可,并可加装减速器以提高驱动扭矩,既減轻了重量,又节约了成本,
一种多自由度机械臂的动力驱动机构.pdf
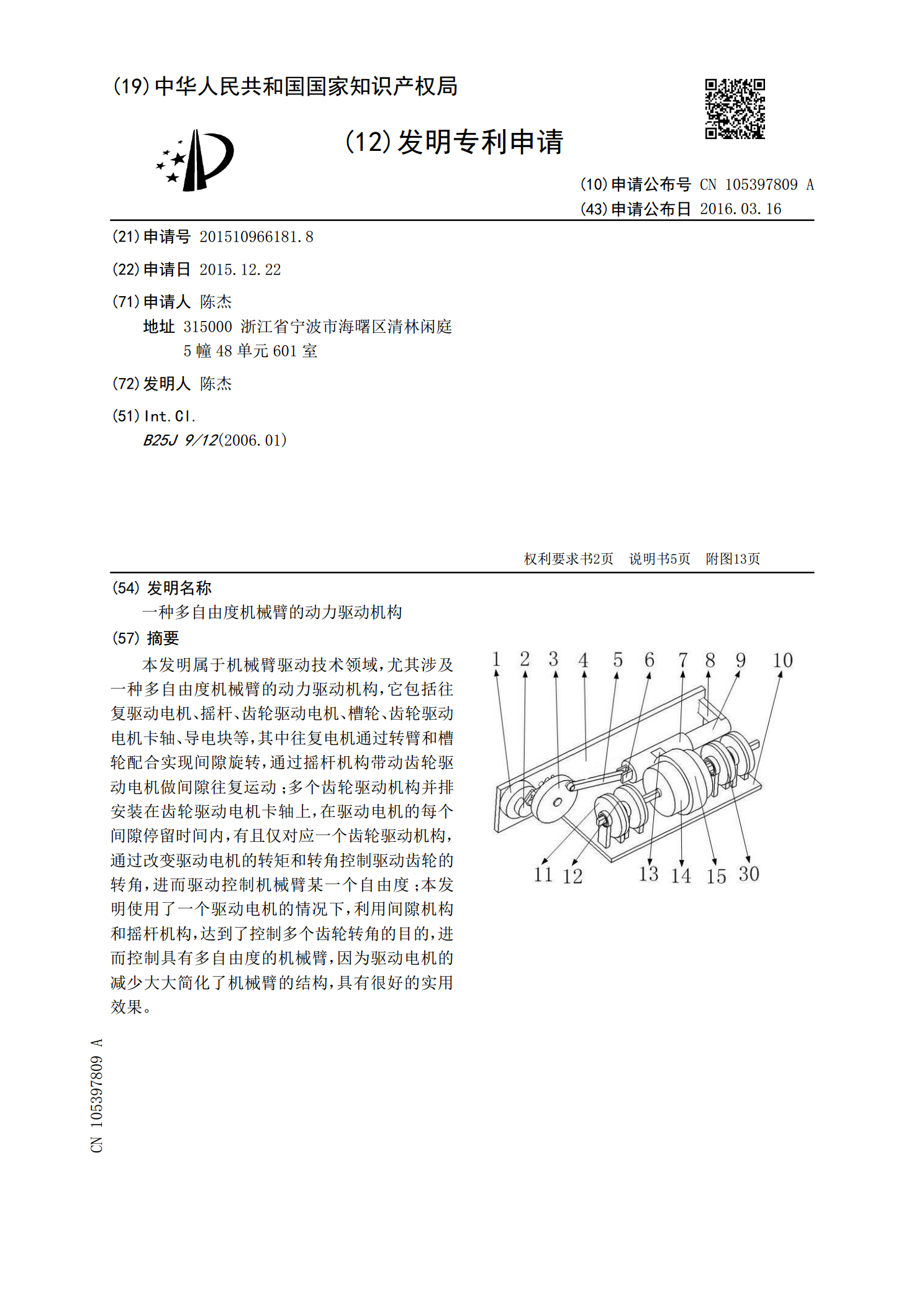
本发明属于机械臂驱动技术领域,尤其涉及一种多自由度机械臂的动力驱动机构,它包括往复驱动电机、摇杆、齿轮驱动电机、槽轮、齿轮驱动电机卡轴、导电块等,其中往复电机通过转臂和槽轮配合实现间隙旋转,通过摇杆机构带动齿轮驱动电机做间隙往复运动;多个齿轮驱动机构并排安装在齿轮驱动电机卡轴上,在驱动电机的每个间隙停留时间内,有且仅对应一个齿轮驱动机构,通过改变驱动电机的转矩和转角控制驱动齿轮的转角,进而驱动控制机械臂某一个自由度;本发明使用了一个驱动电机的情况下,利用间隙机构和摇杆机构,达到了控制多个齿轮转角的目的,进
一种双关节多自由度机械臂及其驱动方法.pdf
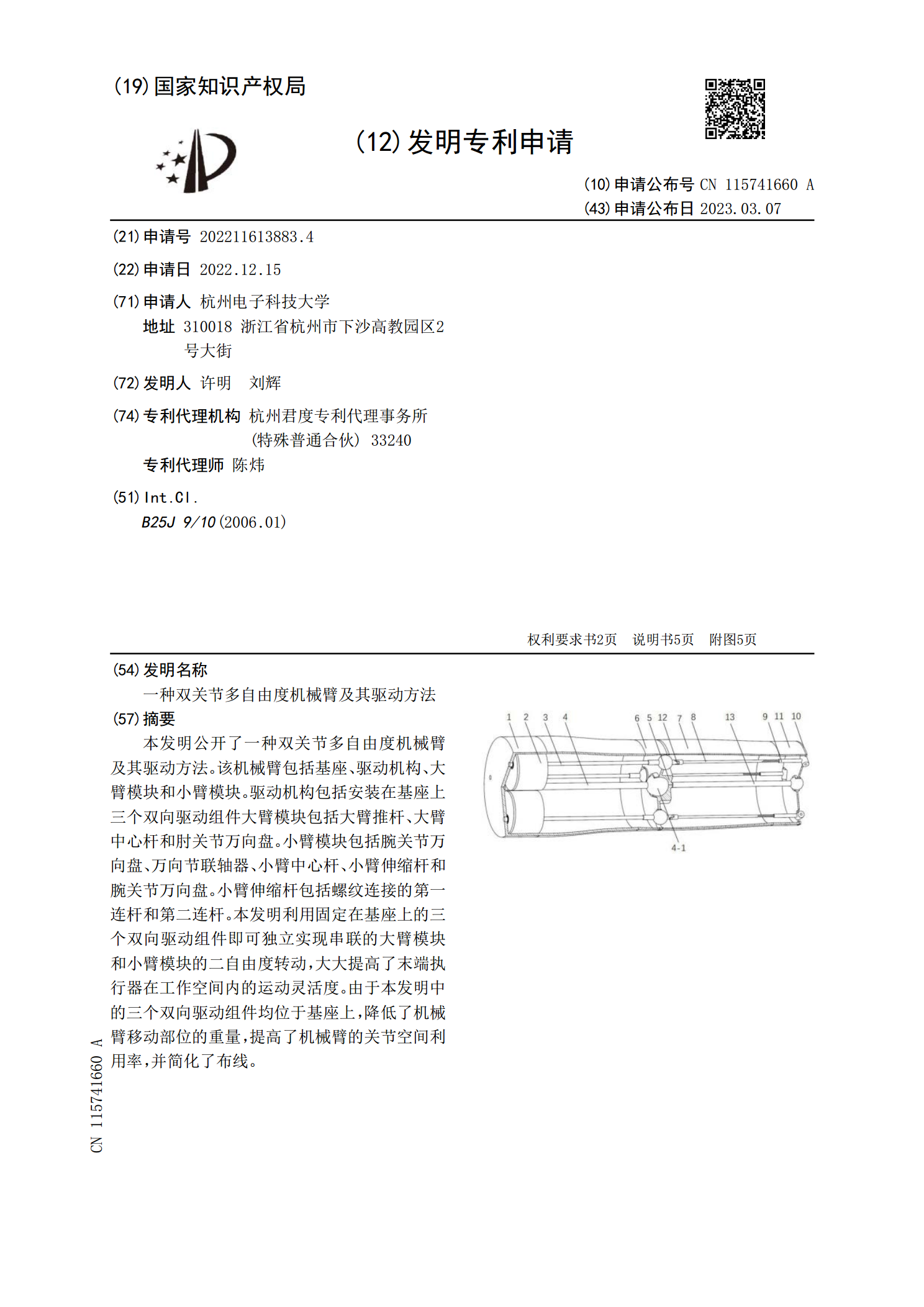
本发明公开了一种双关节多自由度机械臂及其驱动方法。该机械臂包括基座、驱动机构、大臂模块和小臂模块。驱动机构包括安装在基座上三个双向驱动组件大臂模块包括大臂推杆、大臂中心杆和肘关节万向盘。小臂模块包括腕关节万向盘、万向节联轴器、小臂中心杆、小臂伸缩杆和腕关节万向盘。小臂伸缩杆包括螺纹连接的第一连杆和第二连杆。本发明利用固定在基座上的三个双向驱动组件即可独立实现串联的大臂模块和小臂模块的二自由度转动,大大提高了末端执行器在工作空间内的运动灵活度。由于本发明中的三个双向驱动组件均位于基座上,降低了机械臂移动部位
绳索驱动多自由度串联机械臂及其驱动方法.pdf
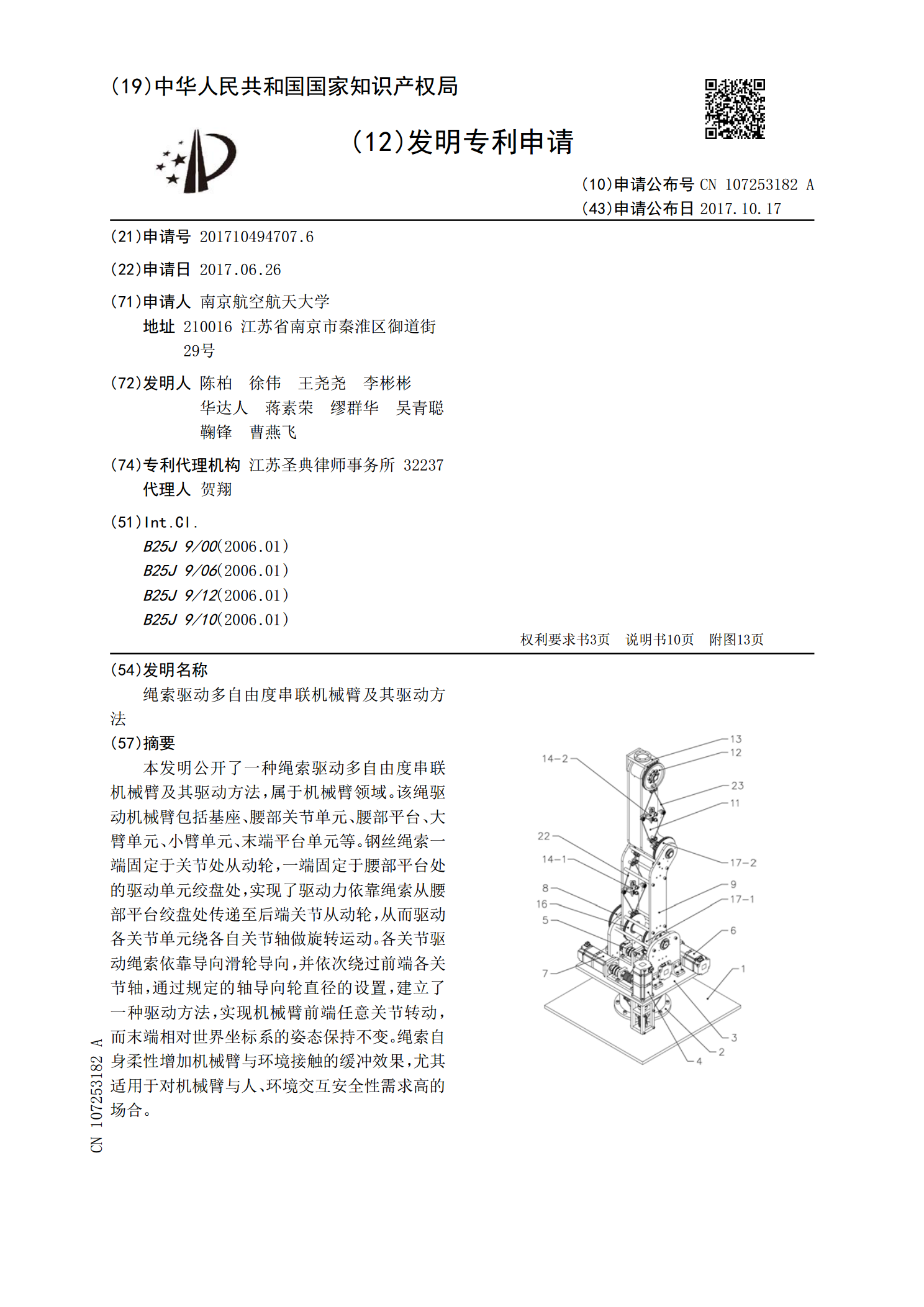
本发明公开了一种绳索驱动多自由度串联机械臂及其驱动方法,属于机械臂领域。该绳驱动机械臂包括基座、腰部关节单元、腰部平台、大臂单元、小臂单元、末端平台单元等。钢丝绳索一端固定于关节处从动轮,一端固定于腰部平台处的驱动单元绞盘处,实现了驱动力依靠绳索从腰部平台绞盘处传递至后端关节从动轮,从而驱动各关节单元绕各自关节轴做旋转运动。各关节驱动绳索依靠导向滑轮导向,并依次绕过前端各关节轴,通过规定的轴导向轮直径的设置,建立了一种驱动方法,实现机械臂前端任意关节转动,而末端相对世界坐标系的姿态保持不变。绳索自身柔性增