
一种肢体末端刚度测量装置及其测量方法.pdf

St****36

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种肢体末端刚度测量装置及其测量方法.pdf
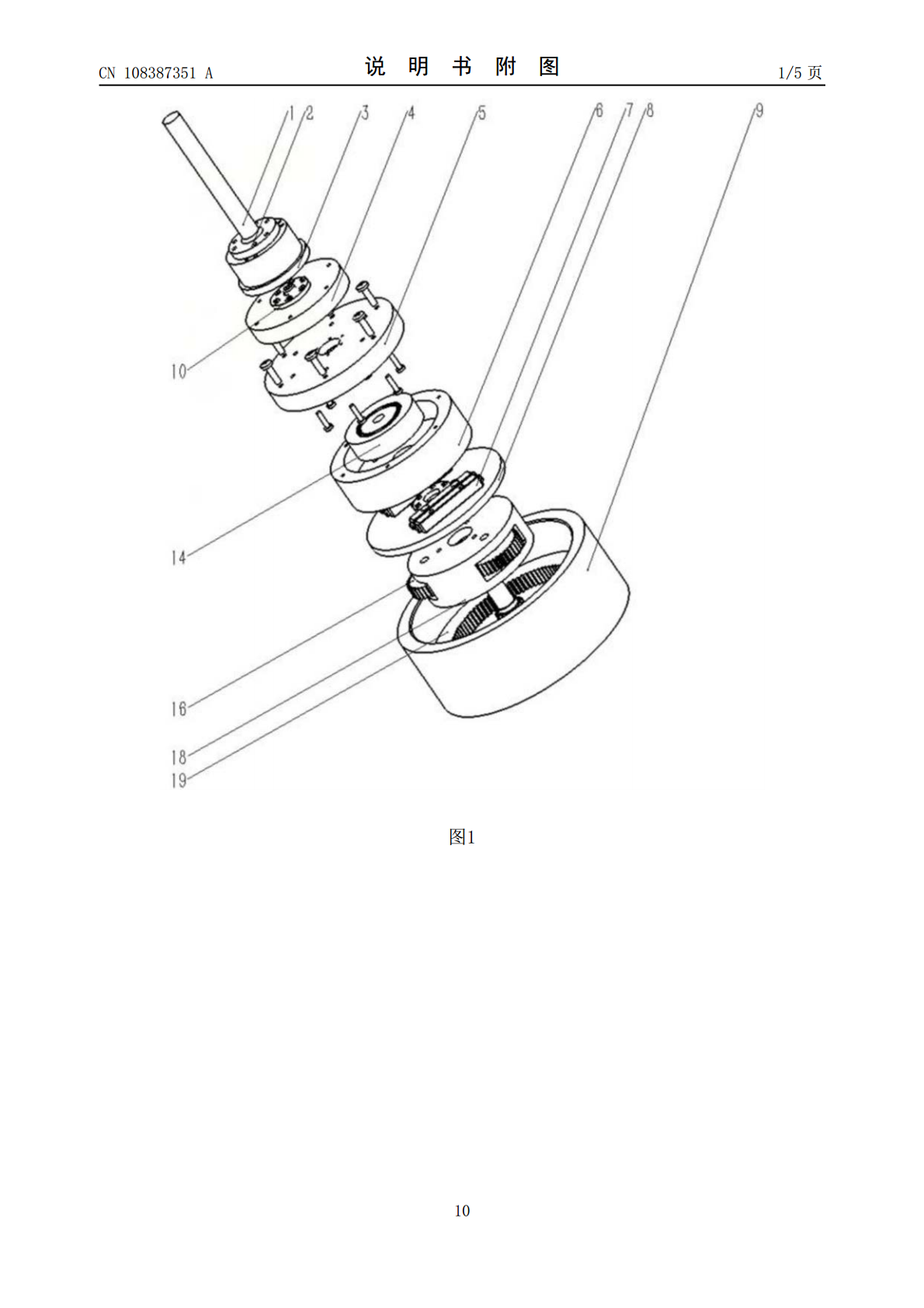
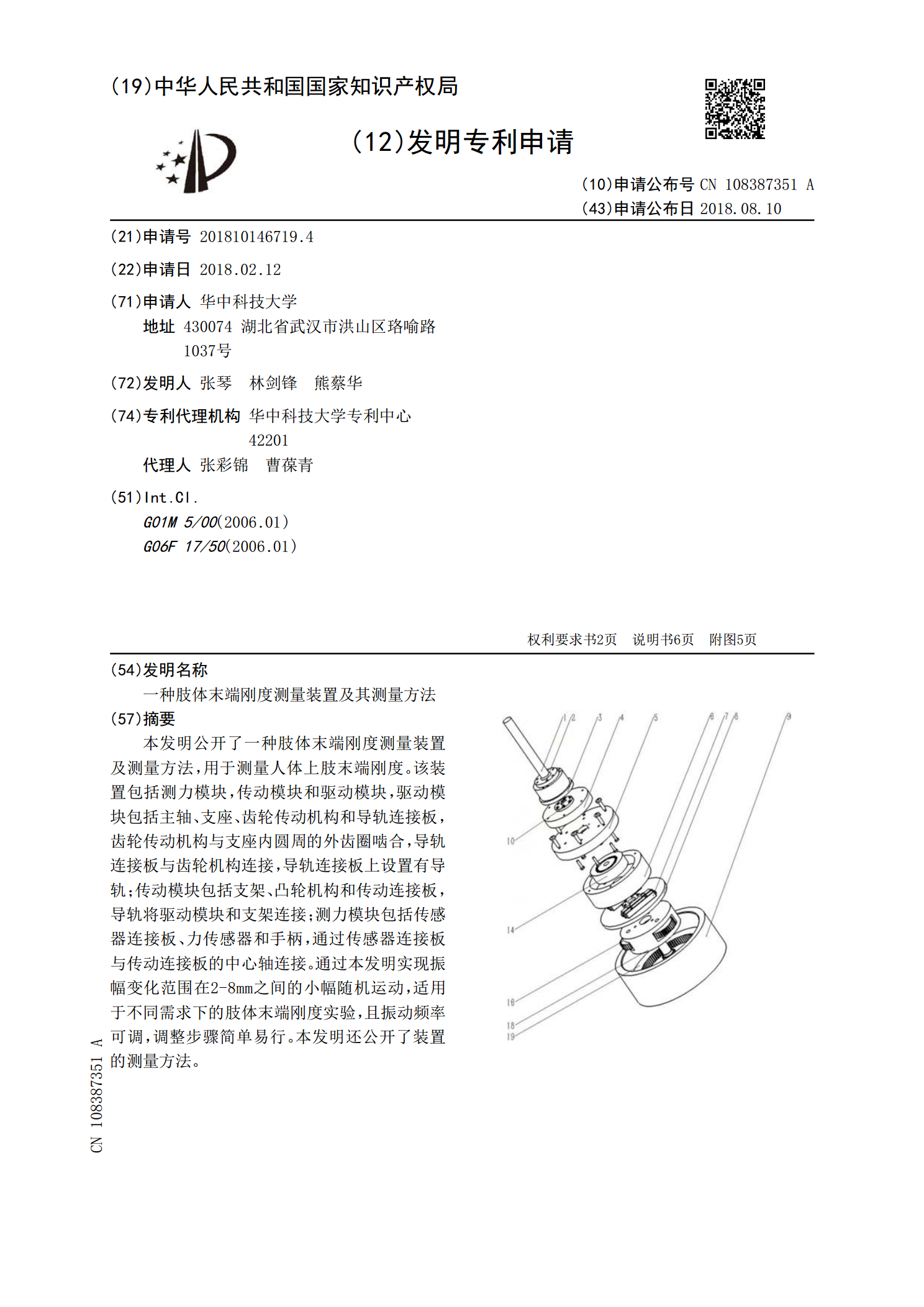
本发明公开了一种肢体末端刚度测量装置及测量方法,用于测量人体上肢末端刚度。该装置包括测力模块,传动模块和驱动模块,驱动模块包括主轴、支座、齿轮传动机构和导轨连接板,齿轮传动机构与支座内圆周的外齿圈啮合,导轨连接板与齿轮机构连接,导轨连接板上设置有导轨;传动模块包括支架、凸轮机构和传动连接板,导轨将驱动模块和支架连接;测力模块包括传感器连接板、力传感器和手柄,通过传感器连接板与传动连接板的中心轴连接。通过本发明实现振幅变化范围在2‑8mm之间的小幅随机运动,适用于不同需求下的肢体末端刚度实验,且振动频率可调

一种微动台刚度测量装置及其刚度测量方法.pdf
本发明公开了一种微动台刚度测量装置,用于测量微动台的刚度,微动台包括方形的微动平台、静态框架、柔性铰链,微动台刚度测量装置包括隔震固定平台、与隔震固定平台和静态框架均固定连接的滑轮支架、安装于滑轮支架的定滑轮、有间隙地穿过静态框架预留的通孔并连接于微动平台的平行于微动平台的运动方向的牵引轴、与牵引轴尾端连接并绕过定滑轮的悬空牵引组件,微动平台设有移动标,微动台刚度测量装置还包括可探测移动标的位移采集器。该装置安装方便、操作简单,具有通用性并且施加的力不随微动台的移动而变化使该装置具有高精度。本发明还公开了

一种弹簧刚度测量装置及其测量方法.pdf
本发明公开了一种弹簧刚度测量装置及其测量方法,涉及机械工程领域。弹簧刚度测量装置包括牵引力采集系统、弹簧、弹簧固定台、位移控制系统、驱动系统、计算机;牵引力采集系统包括拉力传感器和信号放大器;位移控制系统包括蜗轮和蜗杆;驱动系统包括步进电机和传动装置;弹簧的一侧与牵引力采集系统连接,弹簧的另一侧与弹簧固定台连接,蜗轮设置在弹簧固定台下方,蜗杆设置在蜗轮下方;蜗杆与步进电机相连。本发明还建立了弹簧刚度的测量方法,排除了弹簧自重、弹簧测力计精度低等不利因素,可精确测量数值较小的弹簧刚度。
钢车轮螺栓孔刚度测量装置及其测量方法.pdf
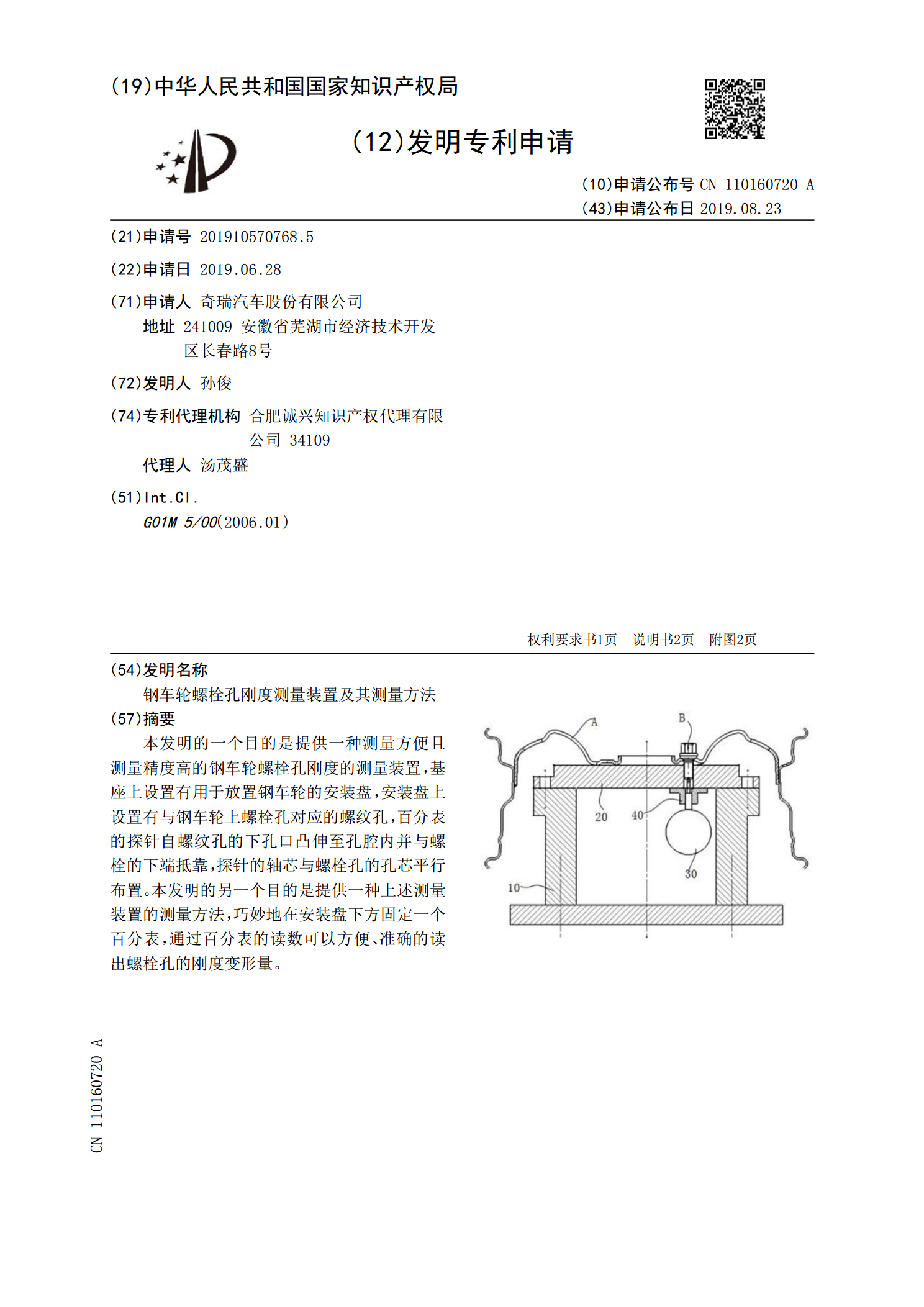
本发明的一个目的是提供一种测量方便且测量精度高的钢车轮螺栓孔刚度的测量装置,基座上设置有用于放置钢车轮的安装盘,安装盘上设置有与钢车轮上螺栓孔对应的螺纹孔,百分表的探针自螺纹孔的下孔口凸伸至孔腔内并与螺栓的下端抵靠,探针的轴芯与螺栓孔的孔芯平行布置。本发明的另一个目的是提供一种上述测量装置的测量方法,巧妙地在安装盘下方固定一个百分表,通过百分表的读数可以方便、准确的读出螺栓孔的刚度变形量。
一种工业机器人末端抖动程度测量装置及其测量方法.pdf
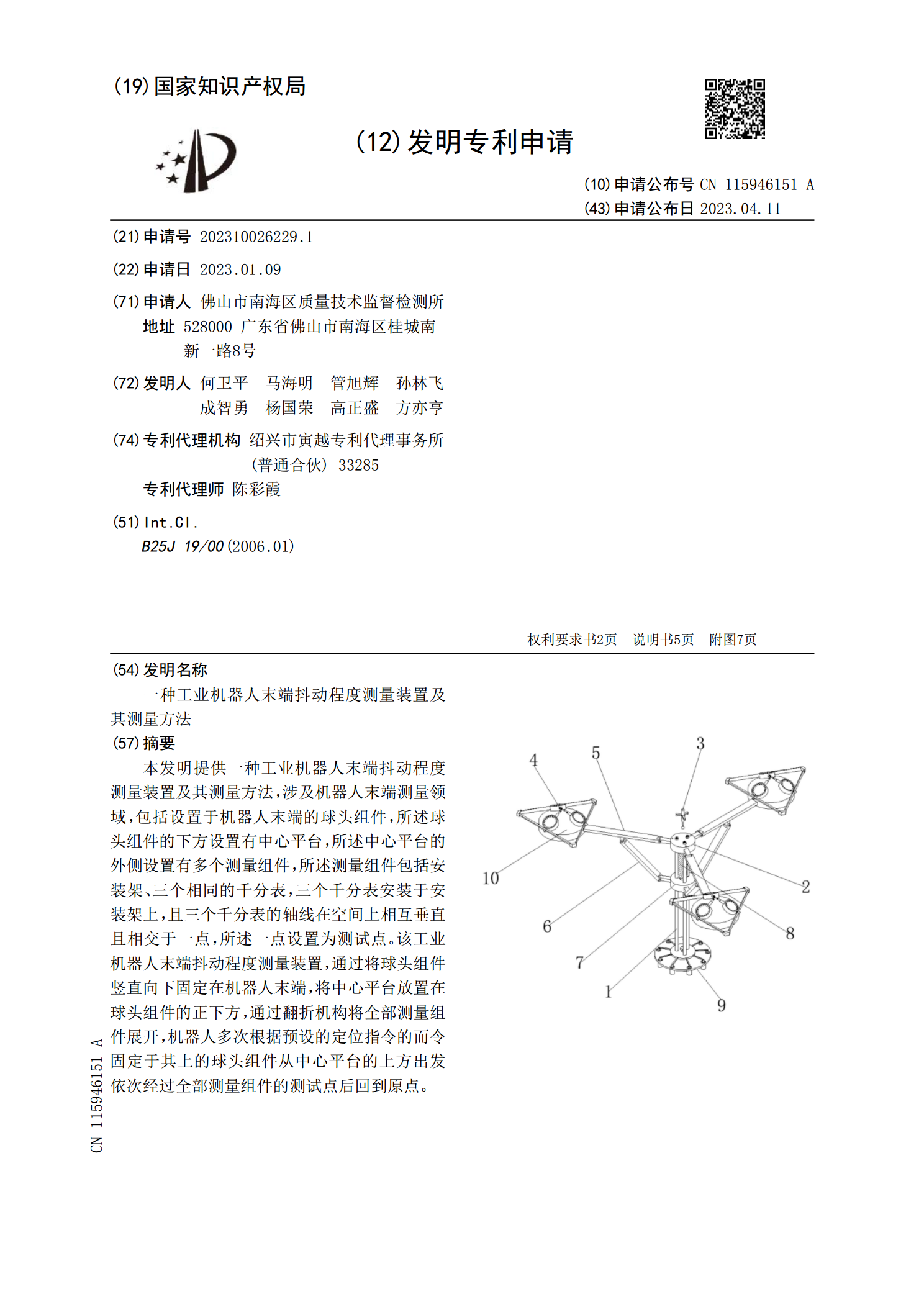
本发明提供一种工业机器人末端抖动程度测量装置及其测量方法,涉及机器人末端测量领域,包括设置于机器人末端的球头组件,所述球头组件的下方设置有中心平台,所述中心平台的外侧设置有多个测量组件,所述测量组件包括安装架、三个相同的千分表,三个千分表安装于安装架上,且三个千分表的轴线在空间上相互垂直且相交于一点,所述一点设置为测试点。该工业机器人末端抖动程度测量装置,通过将球头组件竖直向下固定在机器人末端,将中心平台放置在球头组件的正下方,通过翻折机构将全部测量组件展开,机器人多次根据预设的定位指令的而令固定于其上的