
一种工业机器人末端抖动程度测量装置及其测量方法.pdf

永香****能手


1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种工业机器人末端抖动程度测量装置及其测量方法.pdf
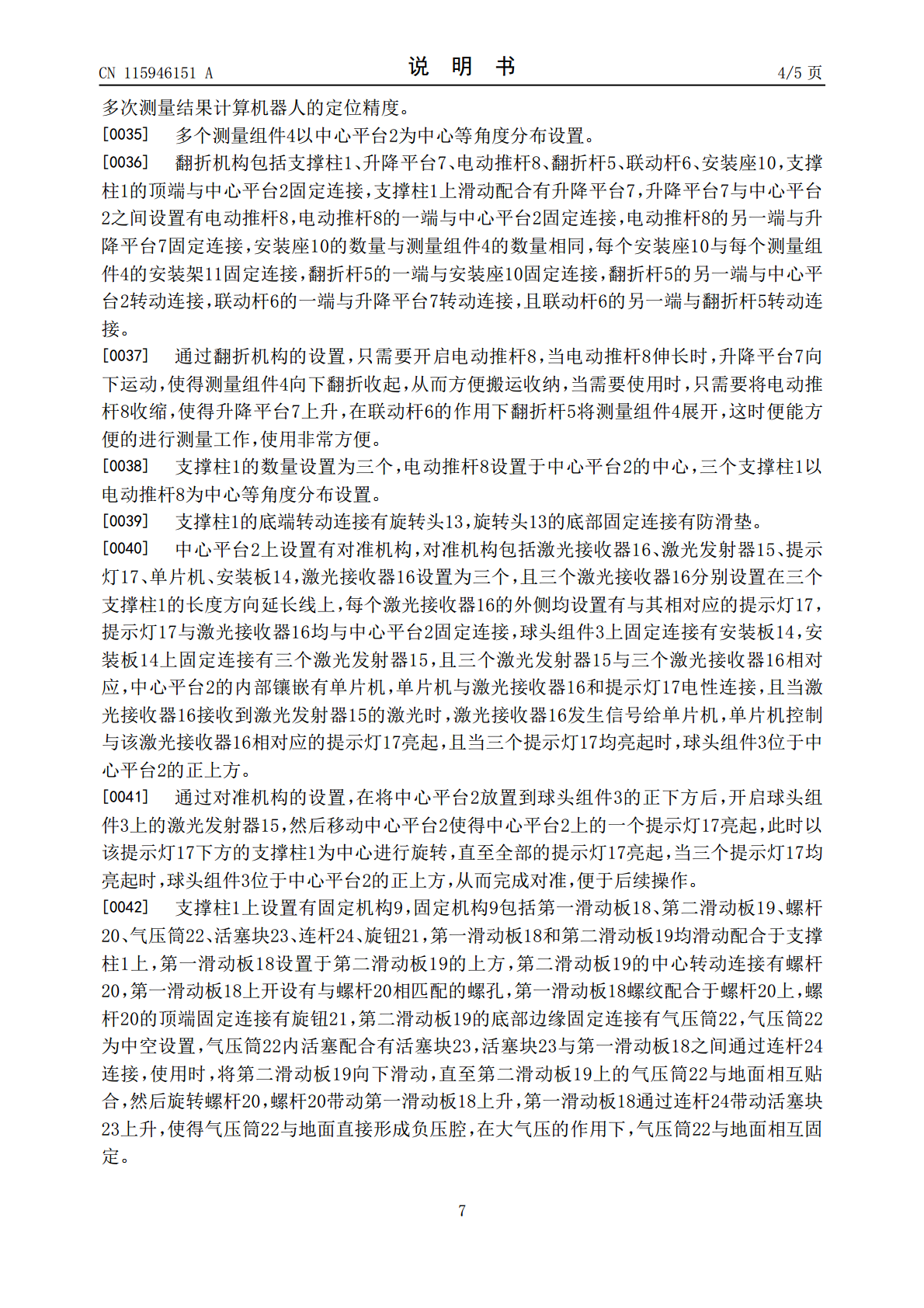
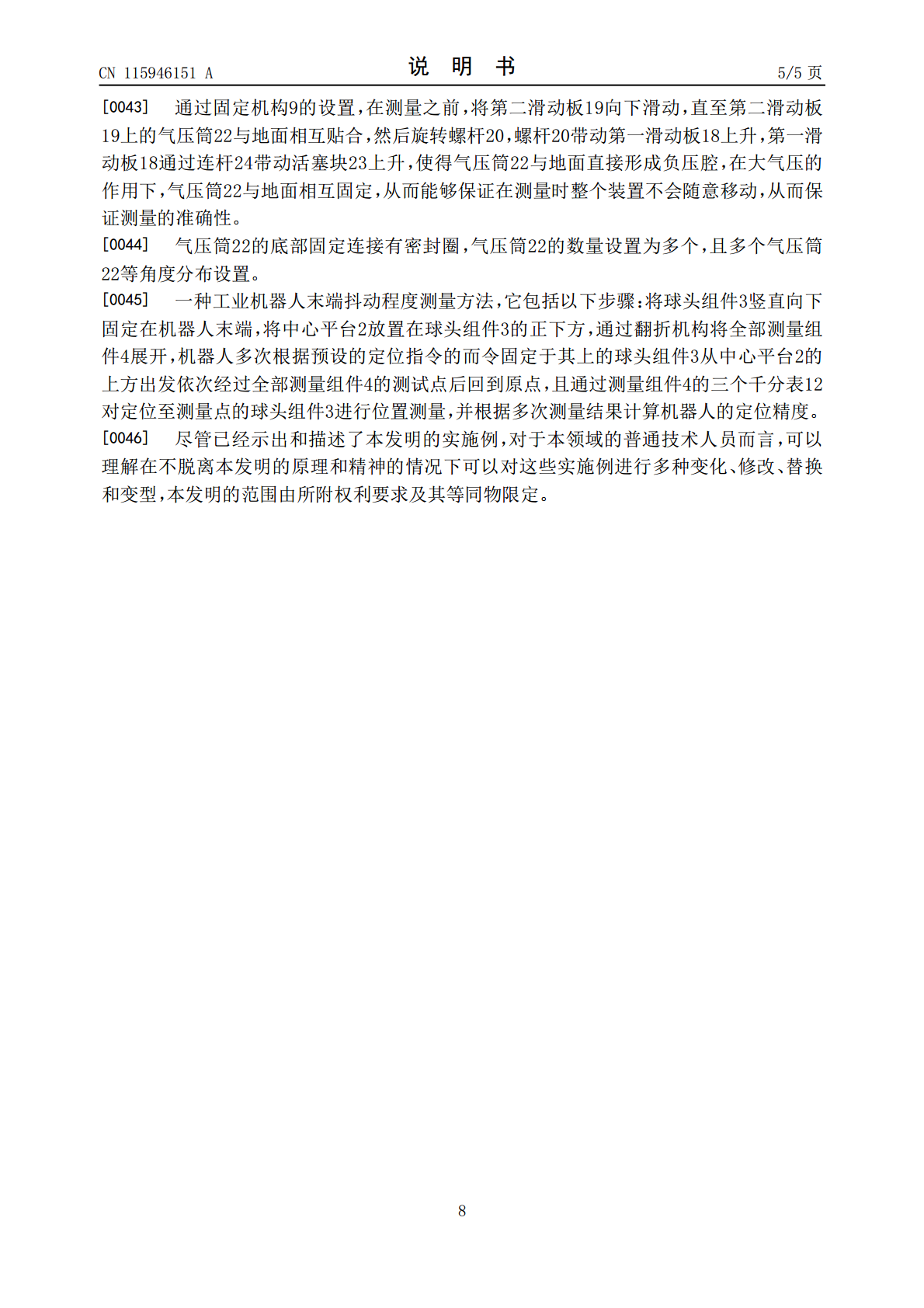
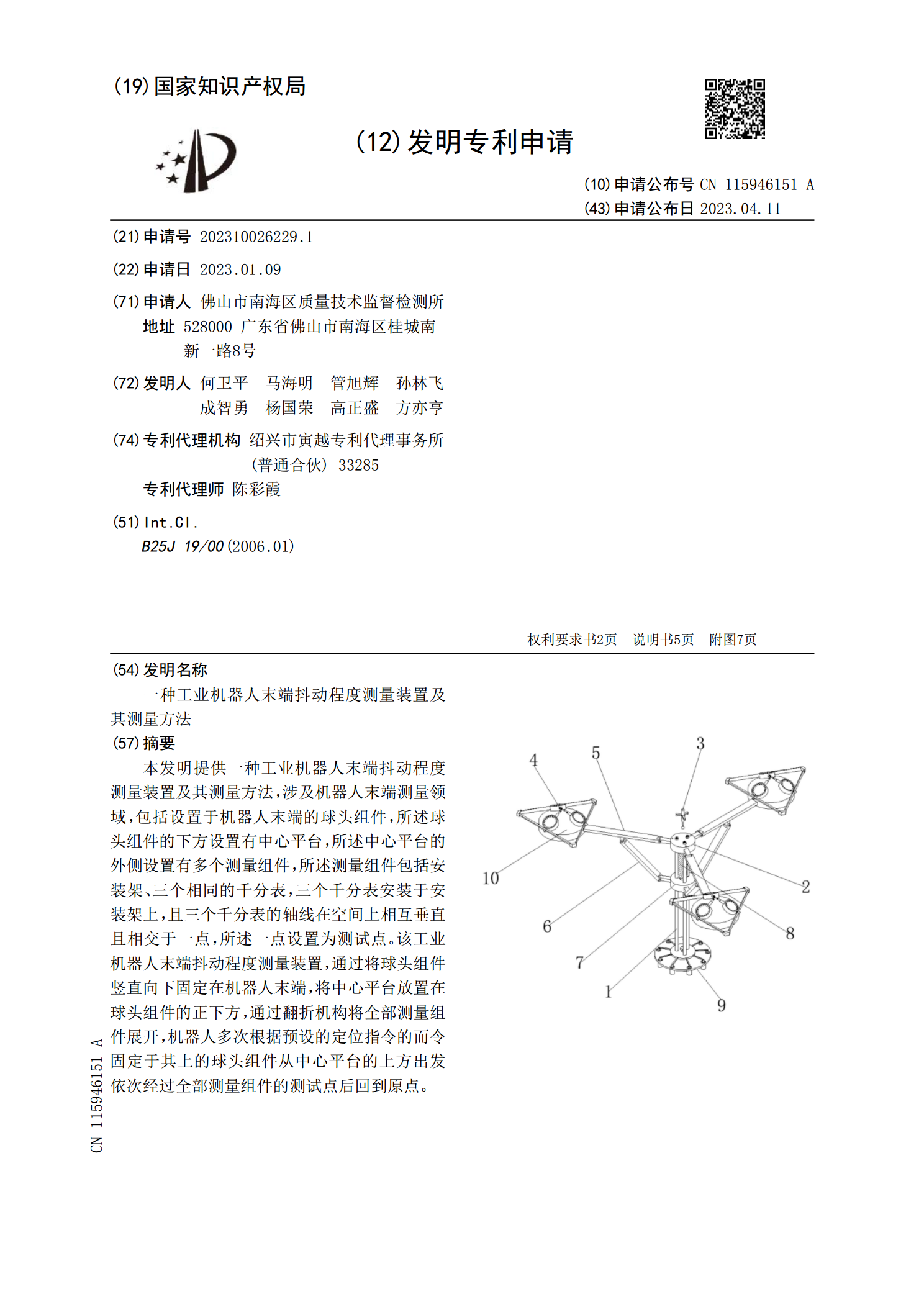
本发明提供一种工业机器人末端抖动程度测量装置及其测量方法,涉及机器人末端测量领域,包括设置于机器人末端的球头组件,所述球头组件的下方设置有中心平台,所述中心平台的外侧设置有多个测量组件,所述测量组件包括安装架、三个相同的千分表,三个千分表安装于安装架上,且三个千分表的轴线在空间上相互垂直且相交于一点,所述一点设置为测试点。该工业机器人末端抖动程度测量装置,通过将球头组件竖直向下固定在机器人末端,将中心平台放置在球头组件的正下方,通过翻折机构将全部测量组件展开,机器人多次根据预设的定位指令的而令固定于其上的
一种肢体末端刚度测量装置及其测量方法.pdf
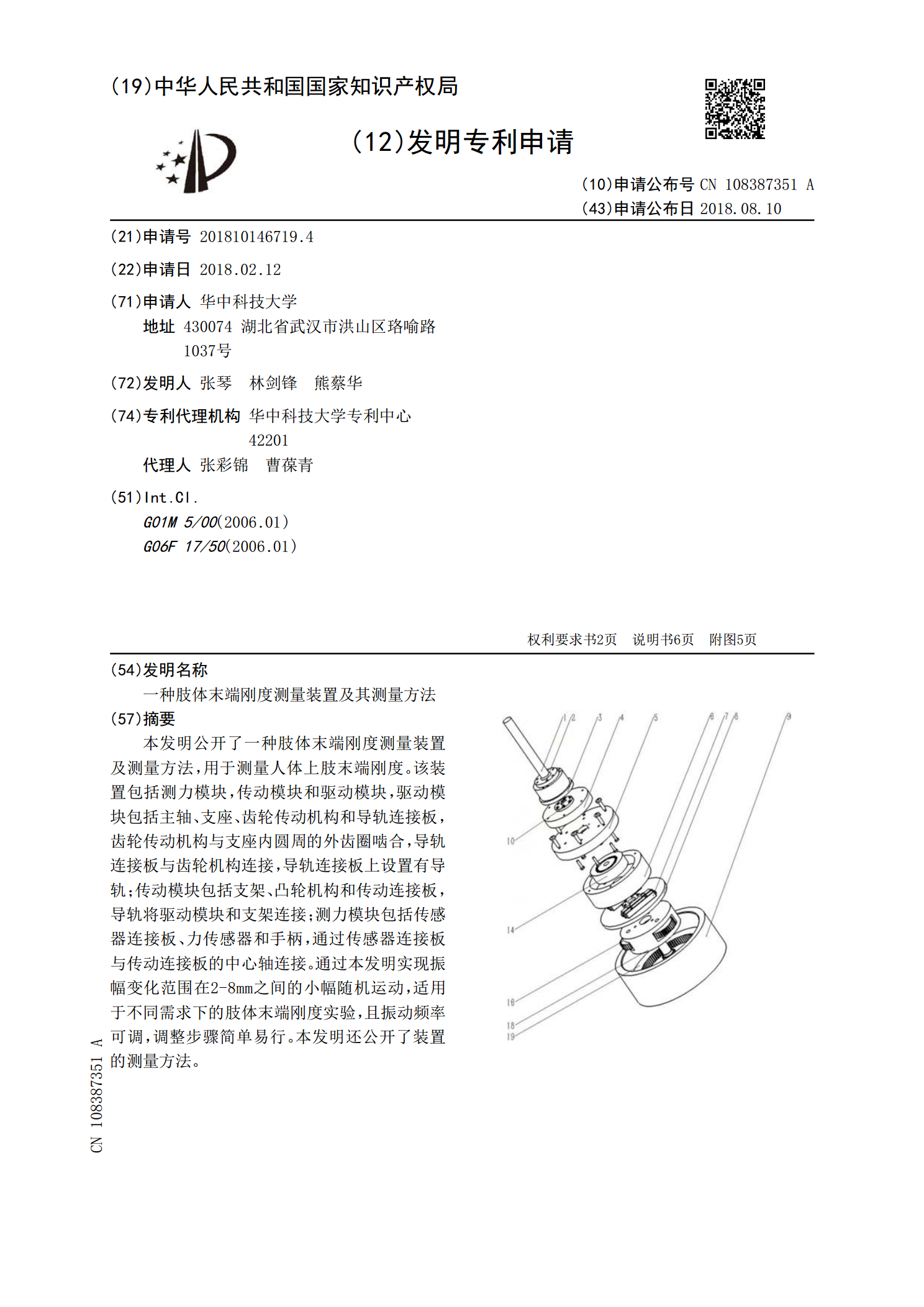
本发明公开了一种肢体末端刚度测量装置及测量方法,用于测量人体上肢末端刚度。该装置包括测力模块,传动模块和驱动模块,驱动模块包括主轴、支座、齿轮传动机构和导轨连接板,齿轮传动机构与支座内圆周的外齿圈啮合,导轨连接板与齿轮机构连接,导轨连接板上设置有导轨;传动模块包括支架、凸轮机构和传动连接板,导轨将驱动模块和支架连接;测力模块包括传感器连接板、力传感器和手柄,通过传感器连接板与传动连接板的中心轴连接。通过本发明实现振幅变化范围在2‑8mm之间的小幅随机运动,适用于不同需求下的肢体末端刚度实验,且振动频率可调

工业六轴机器人末端抖动的研究.docx
工业六轴机器人末端抖动的研究本文旨在探讨工业六轴机器人末端抖动问题,并提出解决措施。首先,分析工业六轴机器人的结构,了解其原理和构成要素。然后,针对机器人的运动过程中出现的抖动问题,分析其成因和影响,并提出相应的解决措施,以提高机器人的作业质量和效率。一、工业六轴机器人结构及原理工业六轴机器人是一种具有六个自由度的机器人,它由机械结构、控制系统、传感器三个部分组成。1.机械结构机械结构是工业六轴机器人的物理载体,它包括底座、臂、手和末端执行器等部分。其中,底座是机器人的基础部分,它通过支撑机器人的臂和手来
机器人末端工具的位姿测量方法.pdf
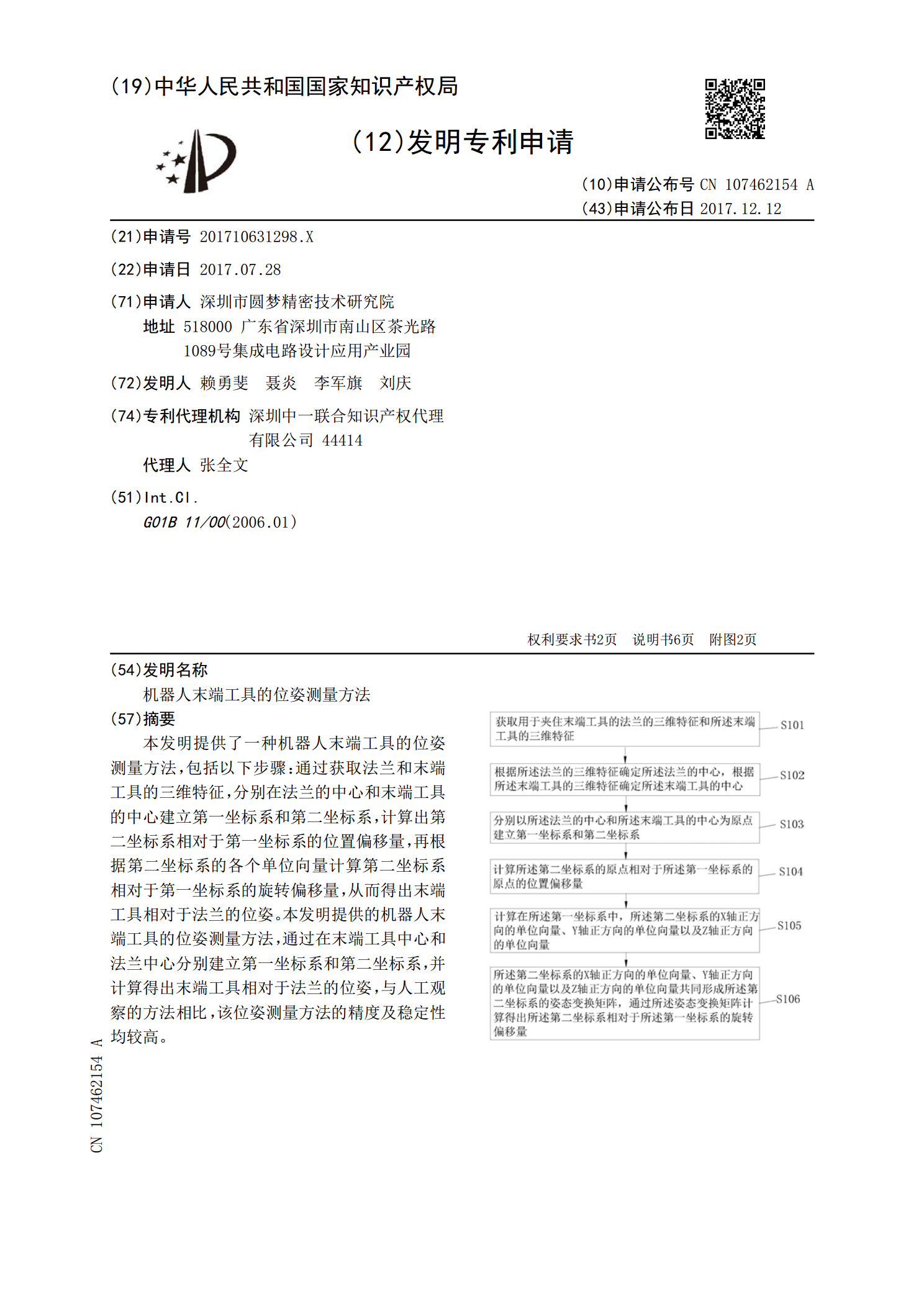
本发明提供了一种机器人末端工具的位姿测量方法,包括以下步骤:通过获取法兰和末端工具的三维特征,分别在法兰的中心和末端工具的中心建立第一坐标系和第二坐标系,计算出第二坐标系相对于第一坐标系的位置偏移量,再根据第二坐标系的各个单位向量计算第二坐标系相对于第一坐标系的旋转偏移量,从而得出末端工具相对于法兰的位姿。本发明提供的机器人末端工具的位姿测量方法,通过在末端工具中心和法兰中心分别建立第一坐标系和第二坐标系,并计算得出末端工具相对于法兰的位姿,与人工观察的方法相比,该位姿测量方法的精度及稳定性均较高。
一种结构表面混凝土剥落程度测量装置及测量方法.pdf
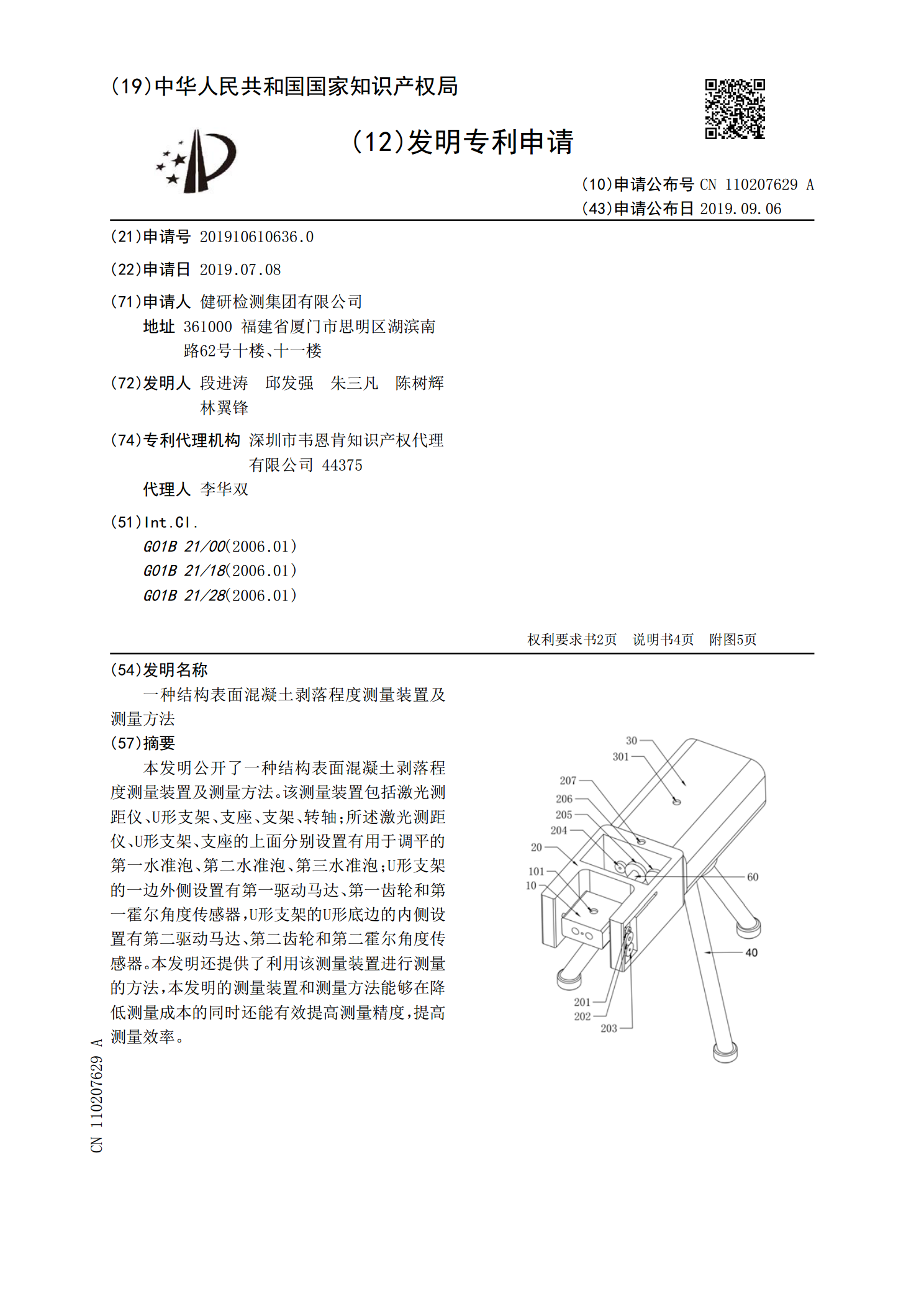
本发明公开了一种结构表面混凝土剥落程度测量装置及测量方法。该测量装置包括激光测距仪、U形支架、支座、支架、转轴;所述激光测距仪、U形支架、支座的上面分别设置有用于调平的第一水准泡、第二水准泡、第三水准泡;U形支架的一边外侧设置有第一驱动马达、第一齿轮和第一霍尔角度传感器,U形支架的U形底边的内侧设置有第二驱动马达、第二齿轮和第二霍尔角度传感器。本发明还提供了利用该测量装置进行测量的方法,本发明的测量装置和测量方法能够在降低测量成本的同时还能有效提高测量精度,提高测量效率。