
仿生关节和机器人.pdf

春景****23

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

仿生关节和机器人.pdf
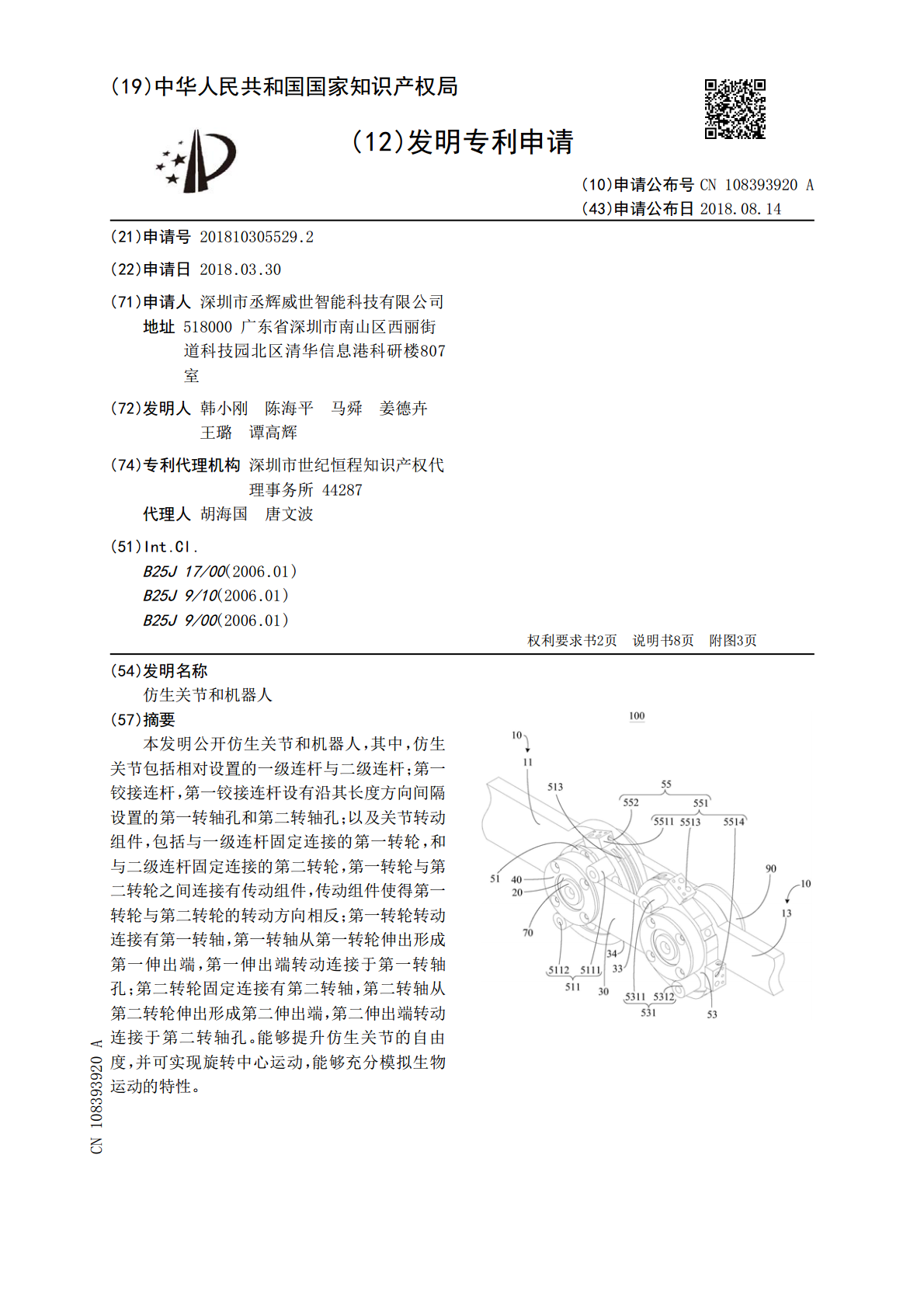
本发明公开仿生关节和机器人,其中,仿生关节包括相对设置的一级连杆与二级连杆;第一铰接连杆,第一铰接连杆设有沿其长度方向间隔设置的第一转轴孔和第二转轴孔;以及关节转动组件,包括与一级连杆固定连接的第一转轮,和与二级连杆固定连接的第二转轮,第一转轮与第二转轮之间连接有传动组件,传动组件使得第一转轮与第二转轮的转动方向相反;第一转轮转动连接有第一转轴,第一转轴从第一转轮伸出形成第一伸出端,第一伸出端转动连接于第一转轴孔;第二转轮固定连接有第二转轴,第二转轴从第二转轮伸出形成第二伸出端,第二伸出端转动连接于第二转
柔性仿生关节和机器人.pdf
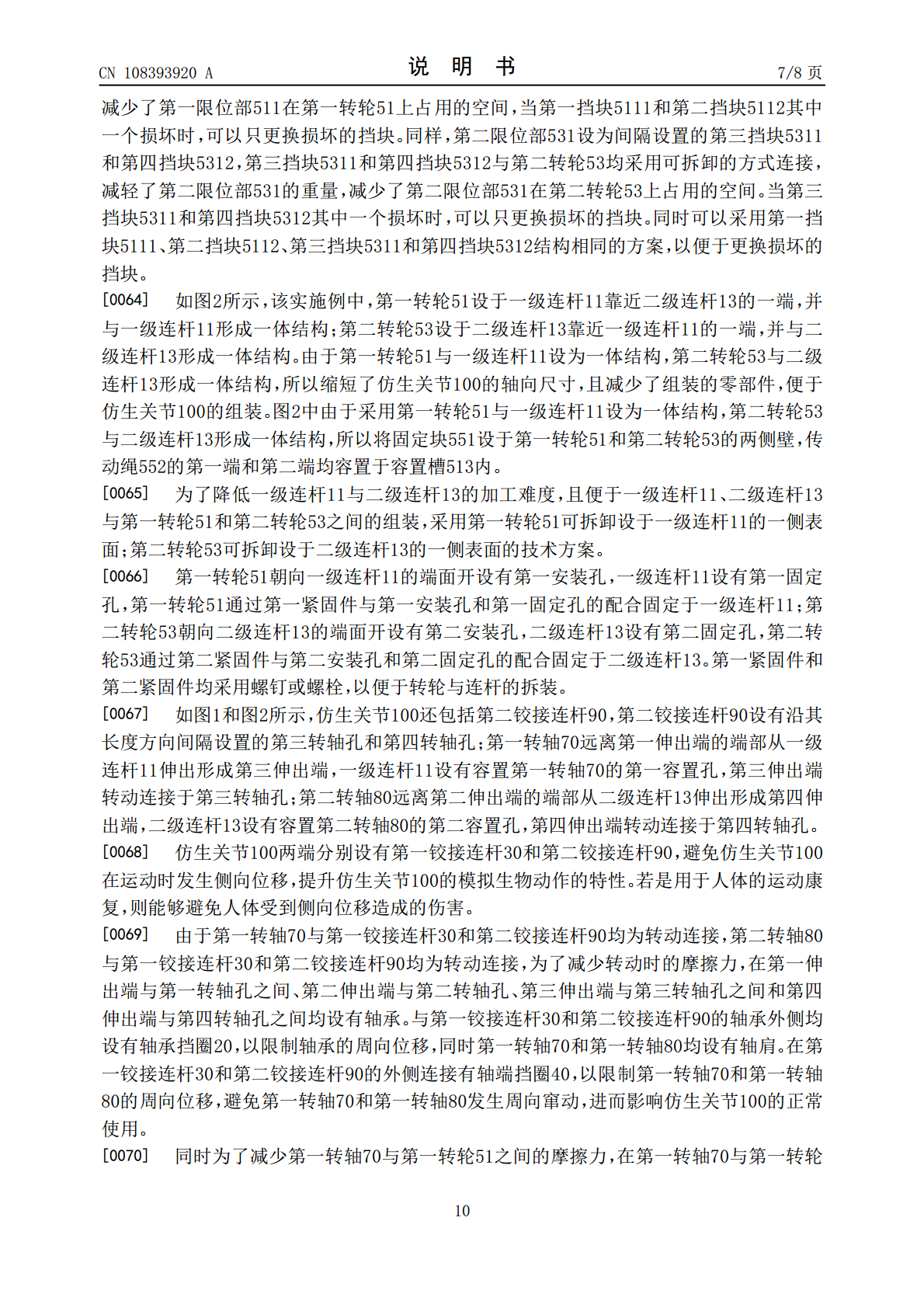
本发明公开一种柔性仿生关节和机器人,柔性仿生关节包括:驱动件,所述驱动件包括输出轴;关节组件,所述关节组件包括第一转动件和邻近所述第一转动件的第二转动件,所述第一转动件包括第一转动轮和与所述第一转动轮同轴固定的第二转动轮,所述第二转动件包括第三转动轮,第一传动件,所述第一传动件绕过所述输出轴和所述第一转动轮;以及第二传动件,所述第二传动件绕过所述第二转动轮和所述第三转动轮。本发明技术方案旨在降低外骨骼整体质量,安装空间紧凑,并实现合理的传动比配置,利于实现过载保护,方便使用。
仿生关节和外骨骼机器人.pdf
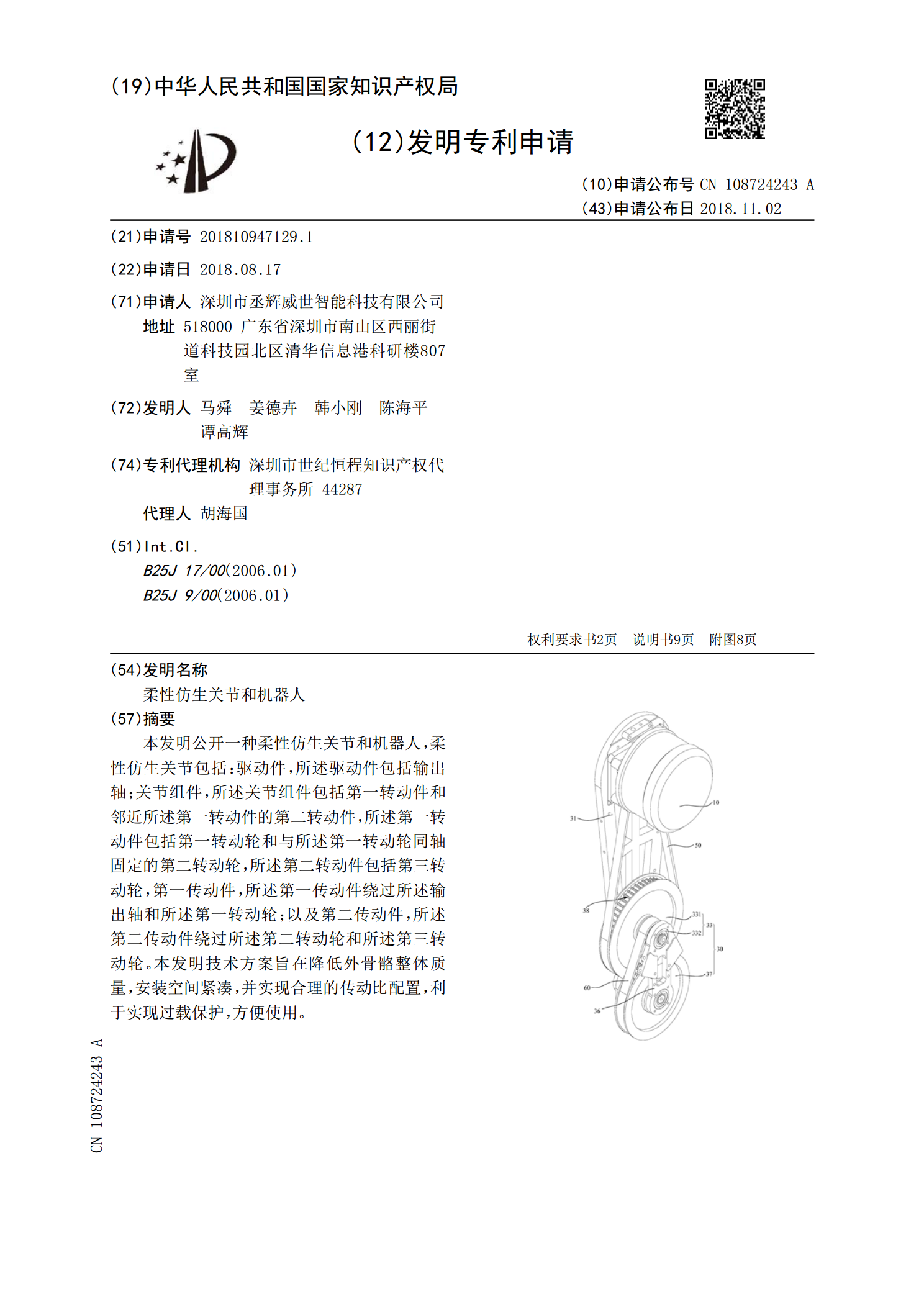
本发明公开一种仿生关节和外骨骼机器人,其中仿生关节包括仿生关节组件,仿生关节组件包括第一关节与第二关节,第二关节与第一关节相对设置;第一连杆,该第一连杆设有沿其长度方向间隔设置的第一转轴孔和第二转轴孔;以及关节转动组件,包括与第一关节固定连接的第一齿轮,和与第二关节固定连接的第二齿轮,第一齿轮和第二齿轮相啮合;第一齿轮转动连接有第一转轴,第一转轴从第一齿轮伸出形成第一伸出端,第一伸出端转动连接于第一转轴孔;第二齿轮固定连接有第二转轴,第二转轴从第二齿轮伸出形成第二伸出端,第二伸出端转动连接于第二转轴孔。用

关节履带复合式仿生机器人.pdf
关节履带复合式仿生机器人,由由四只动力形式相同的动力单元组成,每个运动单元包括大臂、小臂、驱动轮、从动轮和小臂外围的履带,主电机(17)安装在侧架体(3)上,由主电机(17)驱动转动的大臂(2),主齿轮(24)安装在动力电机(8)的动力输出轴上,主齿轮(24)与从齿轮(25)啮合,由从齿轮(25)驱动的驱动轮(11),由驱动轮(11)带动的履带(5),旋转齿轮(26)安装在旋转电机(7)的输出轴上,内齿环(27)与旋转齿轮(26)啮合,大臂(2)的末端嵌入特殊成型填料(20),旋转电机(7)和动力电机(8

一种多关节并联仿生机器人.pdf
本发明公开了一种多关节并联仿生机器人,包括关节本体和控制机箱,所述关节本体由关节支架、伺服直线电机、第一球形关节、第二球形关节、滚珠丝杠模组和连接支腿,所述关节支架上设有伺服直线电机,所述伺服直线电机的数量为,所述伺服直线电机的转动端与滚珠丝杠模组的螺母相连,机器人整体由若干个带伺服直线电机的关节组成。关节的连接为刚性的球头关节。保证刚性运作的同时又不失灵活,运动轨迹可控性强,可以做出各种复杂动作。较传统的弹簧丝带传动的或者为气动肌肉驱动的离散性关节。运动和控制更为精准,且便于控制,并且单个关节本体安装方