
一种高精度多轴机器人.pdf

努力****南绿


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种高精度多轴机器人.pdf
本发明公开了一种高精度多轴机器人,包括机架、升降机构、旋转机构、直线移动机构、机械臂。升降机构活动安装于机架上,沿机架做竖直方向的升降运动。旋转机构安装于升降机构的顶端,与升降机构在竖直方向上同步运动;旋转机构包括转台、第一从动齿轮、第一主动齿轮、第一电机。直线移动机构安装于转台上;直线移动机构包括直线导轨和驱动组件。机械臂活动安装于直线导轨上;驱动组件驱动机械臂沿直线导轨运动;机械臂包括臂体以及安装于臂体上的第二电机、第二主动轮、第二从动轮、第二传动皮带。本发明结构巧妙合理,精度高,稳定性好,可快速实现

一种高精度多轴机床.pdf
本发明公开了一种高精度多轴机床,包括机架、驱动机构以及切削机构,所述驱动机构设置于所述机架上,所述驱动机构包括驱动组件以及定位组件,所述驱动组件和所述定位组件分别连接工件的两端,所述驱动组件带动所述工件在W轴旋转;所述切削机构包括移动组件以及刀具固定组件,所述机架上设置有安装斜面,所述移动组件固定设置于所述安装斜面,所述移动组件带动所述刀具固定组件在X轴以及Y轴方向移动;所述刀具固定组件包括多个刀具,并可驱动其中之一的所述刀具与工件配合;多个所述刀具呈圆周阵列分布,所述刀具固定组件可带动多个所述刀具沿L轴

一种高精度多轴数控机床.pdf
本发明属于数控机床技术领域,本发明公开了一种高精度多轴数控机床,包括底座,所述底座的左表面设置有支撑板,所述支撑板与所述底座滑动连接,所述支撑板的上表面设置有支撑架,所述支撑架与所述支撑板固定连接,所述支撑架的内侧壁设置有固定板,所述固定板与所述支撑架固定连接,所述固定板的前表面设置有切割刀,所述切割刀与所述固定板滑动连接,所述底座的后表面设置有电机;使传动带转动时带动连接杆移动,连接杆移动时带动支撑板移动,从而使支撑板能够带动支撑架进行移动,进而使切割刀改变对物件的切割宽度,使移动支撑架时能够参照刻度尺

一种高精度龙门式四轴机器人.pdf
本发明涉及龙门式机器人技术领域,公开了一种高精度龙门式四轴机器人,包括固定架、第一轴向机构、第二轴向机构、第三轴向机构和第四轴向机构;第二轴向机构设置有安装架,安装架设置有一组滑轨a、与滑轨a配合的滑块a,安装架还设置有第一电机且两端各设置有与第一电机同步连接的同步轮a,同步轮a设置有与滑块a连接的螺杆a,两根螺杆a的螺纹方向相反;本发明具有如下优点:1、本发明方案包括X轴、Y轴、Z轴及旋转轴四个轴向机构,无需安装额外的旋转装置即可实现四轴驱动;2、本发明方案采用两个螺纹相互反向的螺杆同步转动驱使第三轴向
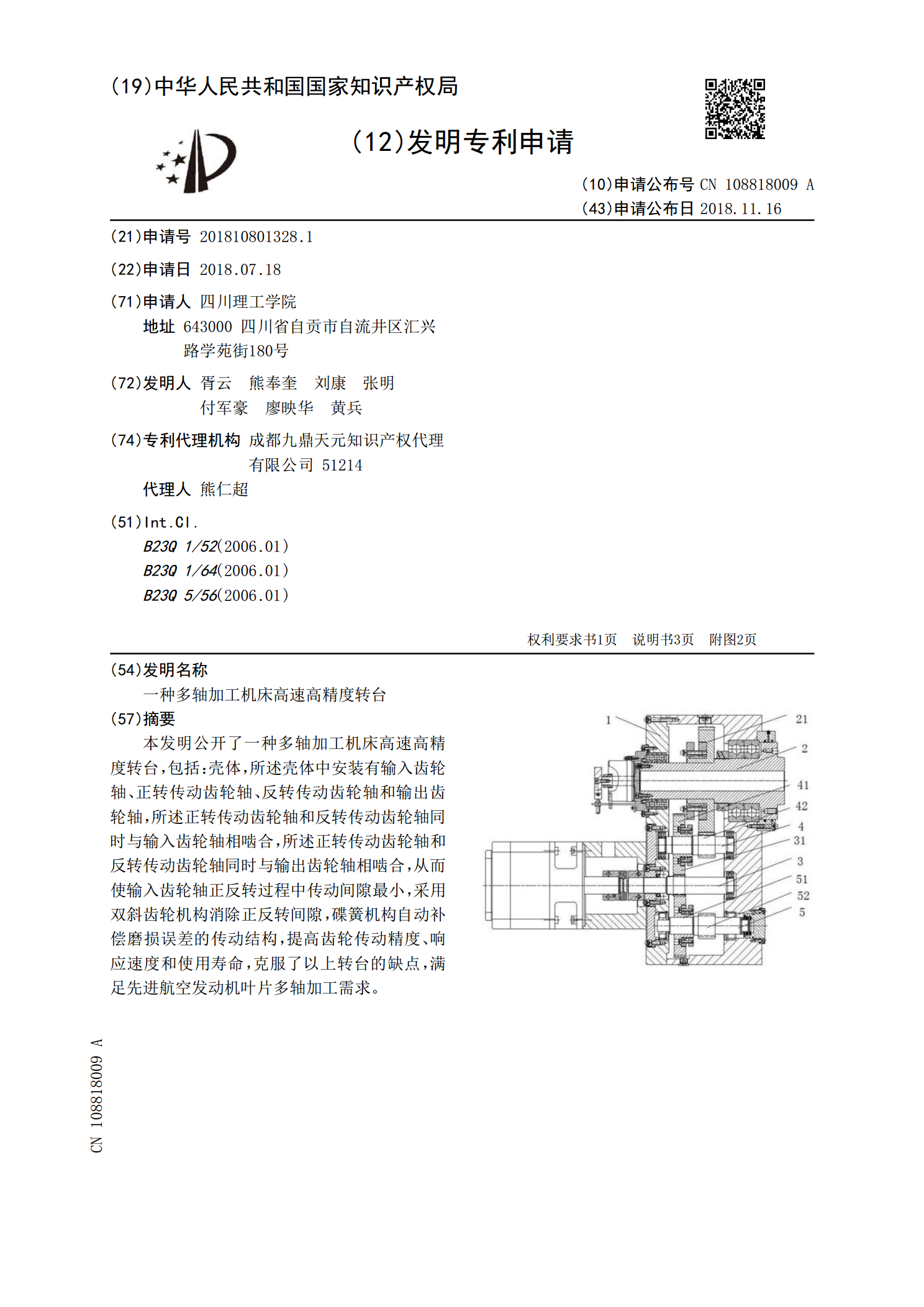
一种多轴加工机床高速高精度转台.pdf
本发明公开了一种多轴加工机床高速高精度转台,包括:壳体,所述壳体中安装有输入齿轮轴、正转传动齿轮轴、反转传动齿轮轴和输出齿轮轴,所述正转传动齿轮轴和反转传动齿轮轴同时与输入齿轮轴相啮合,所述正转传动齿轮轴和反转传动齿轮轴同时与输出齿轮轴相啮合,从而使输入齿轮轴正反转过程中传动间隙最小,采用双斜齿轮机构消除正反转间隙,碟簧机构自动补偿磨损误差的传动结构,提高齿轮传动精度、响应速度和使用寿命,克服了以上转台的缺点,满足先进航空发动机叶片多轴加工需求。