
一种二维指向机构用高精密周向分度装置.pdf

一吃****继勇

1/6
2/6

3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种二维指向机构用高精密周向分度装置.pdf
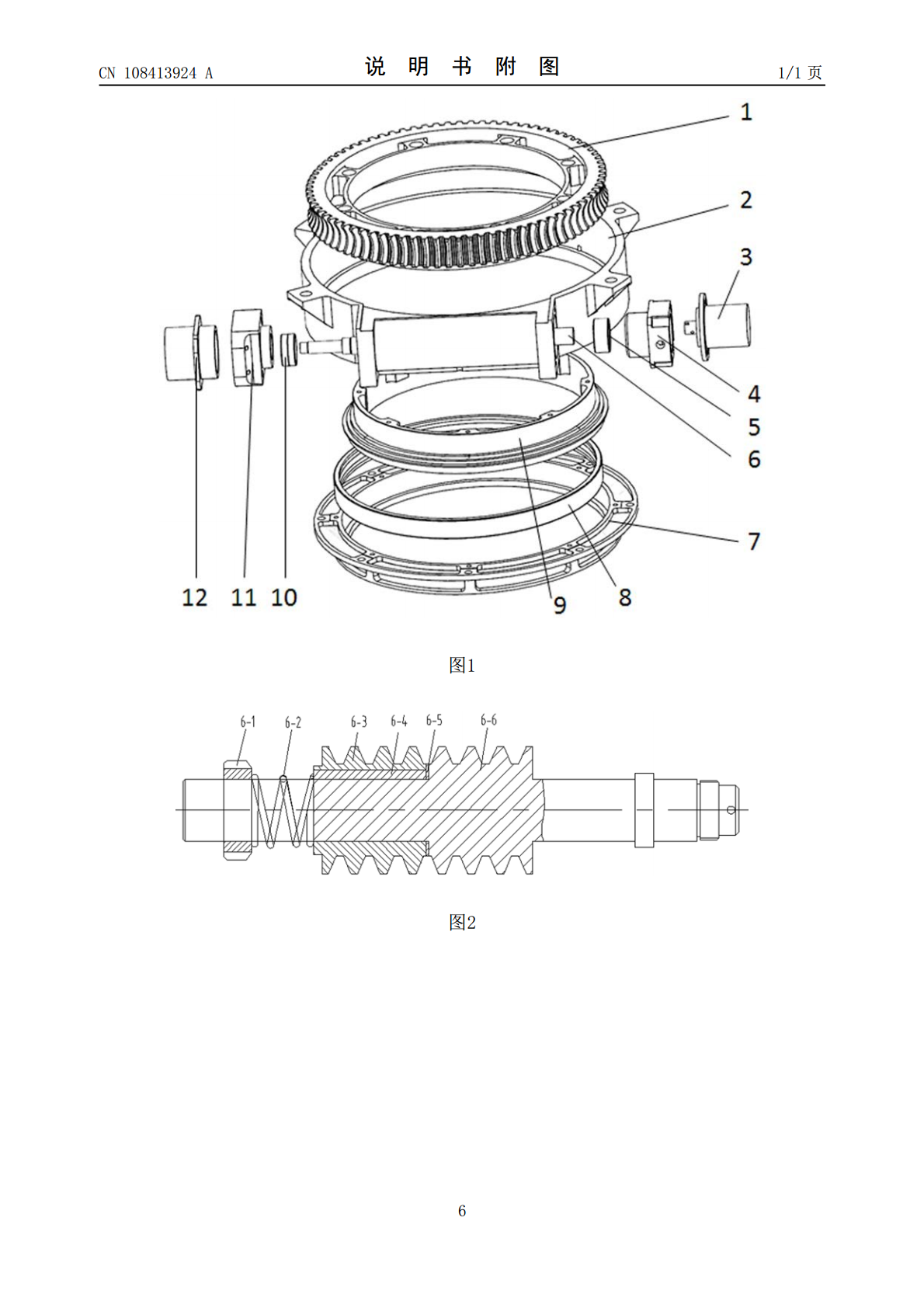
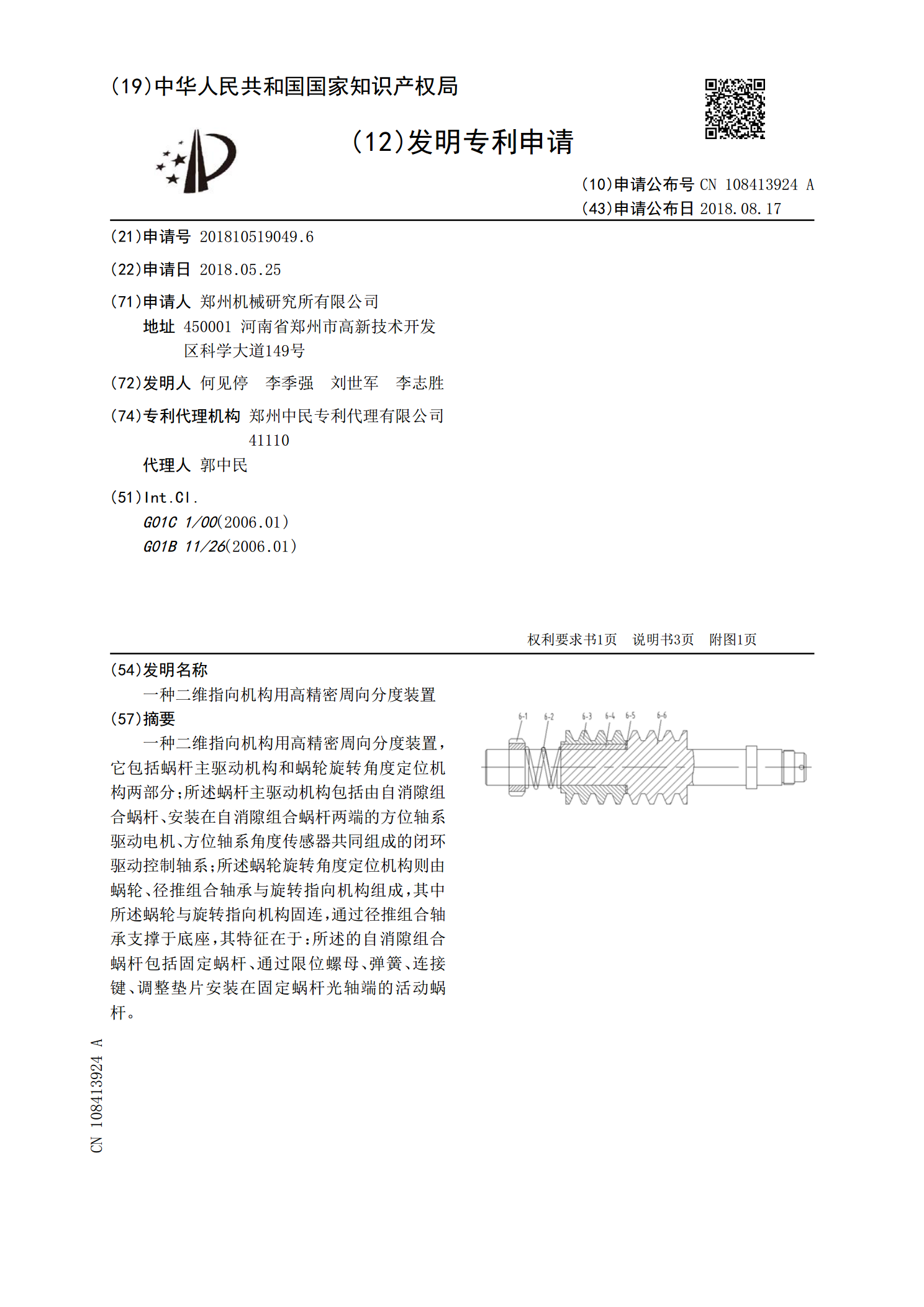
一种二维指向机构用高精密周向分度装置,它包括蜗杆主驱动机构和蜗轮旋转角度定位机构两部分;所述蜗杆主驱动机构包括由自消隙组合蜗杆、安装在自消隙组合蜗杆两端的方位轴系驱动电机、方位轴系角度传感器共同组成的闭环驱动控制轴系;所述蜗轮旋转角度定位机构则由蜗轮、径推组合轴承与旋转指向机构组成,其中所述蜗轮与旋转指向机构固连,通过径推组合轴承支撑于底座,其特征在于:所述的自消隙组合蜗杆包括固定蜗杆、通过限位螺母、弹簧、连接键、调整垫片安装在固定蜗杆光轴端的活动蜗杆。
一种二维指向机构精度测量装置.pdf
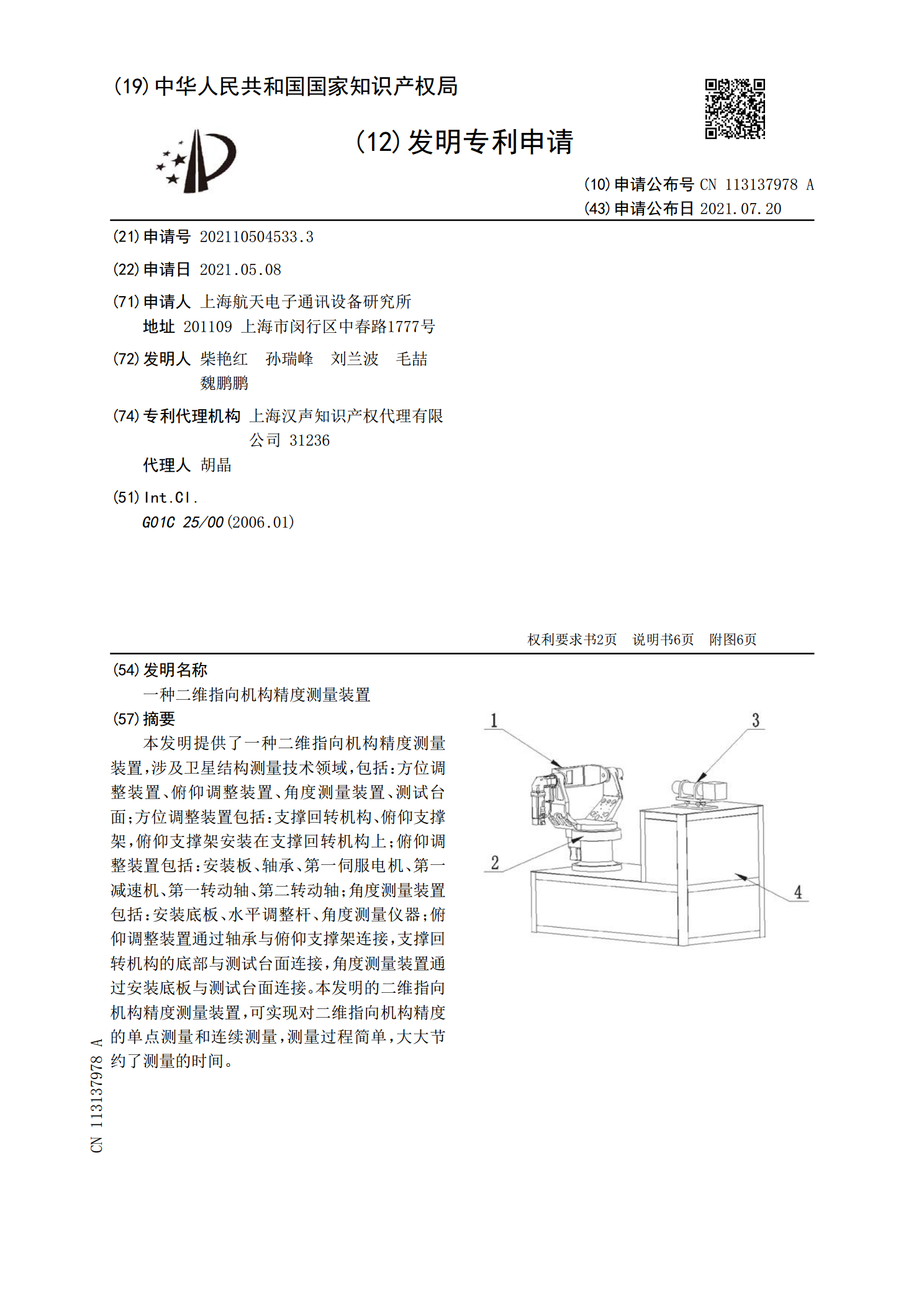
本发明提供了一种二维指向机构精度测量装置,涉及卫星结构测量技术领域,包括:方位调整装置、俯仰调整装置、角度测量装置、测试台面;方位调整装置包括:支撑回转机构、俯仰支撑架,俯仰支撑架安装在支撑回转机构上;俯仰调整装置包括:安装板、轴承、第一伺服电机、第一减速机、第一转动轴、第二转动轴;角度测量装置包括:安装底板、水平调整杆、角度测量仪器;俯仰调整装置通过轴承与俯仰支撑架连接,支撑回转机构的底部与测试台面连接,角度测量装置通过安装底板与测试台面连接。本发明的二维指向机构精度测量装置,可实现对二维指向机构精度的
一种高精密柔性电动伺服指向机构.pdf
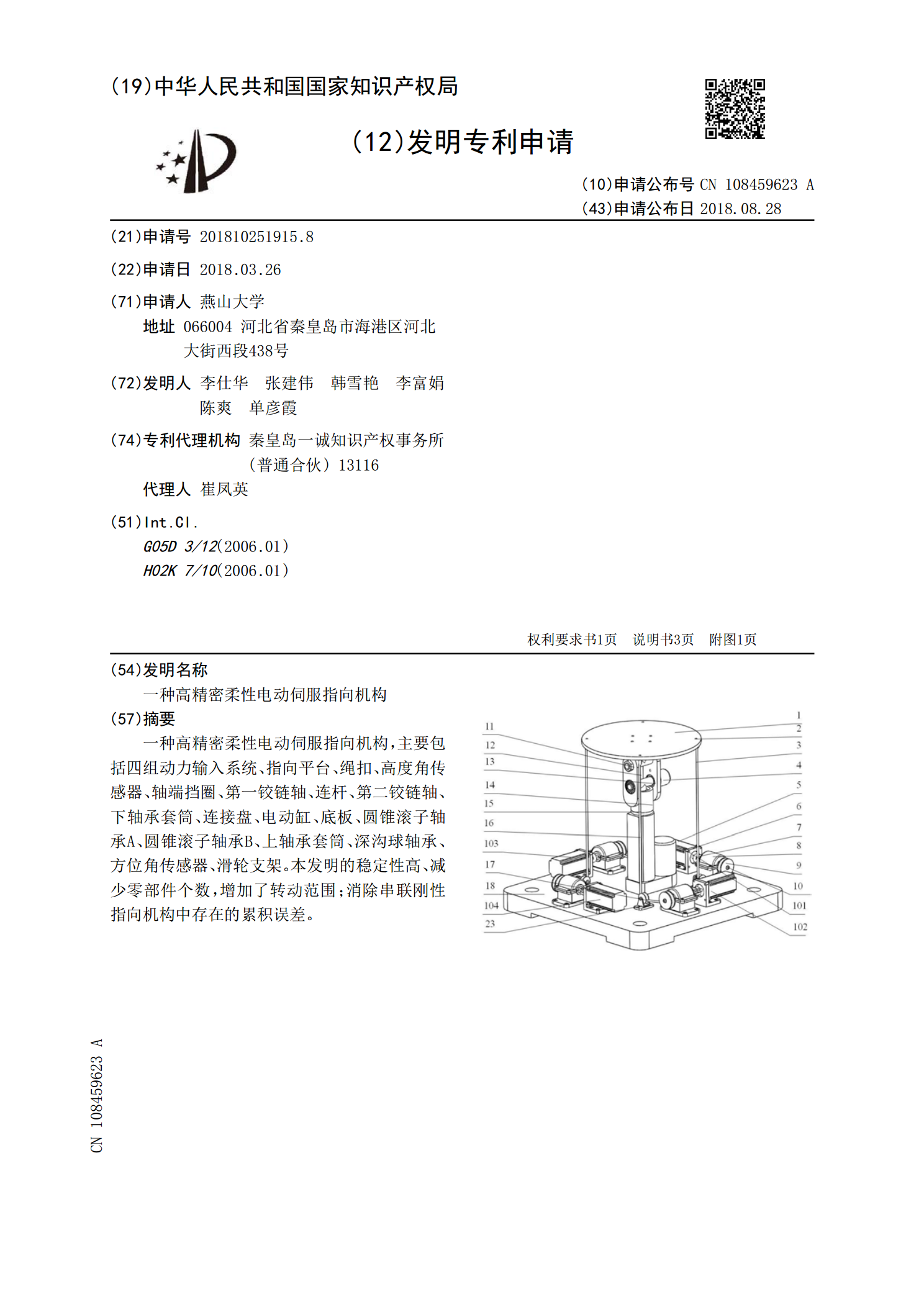
一种高精密柔性电动伺服指向机构,主要包括四组动力输入系统、指向平台、绳扣、高度角传感器、轴端挡圈、第一铰链轴、连杆、第二铰链轴、下轴承套筒、连接盘、电动缸、底板、圆锥滚子轴承A、圆锥滚子轴承B、上轴承套筒、深沟球轴承、方位角传感器、滑轮支架。本发明的稳定性高、减少零部件个数,增加了转动范围;消除串联刚性指向机构中存在的累积误差。

一种二维指向微调装置.pdf
本实用新型公开了一种二维指向微调装置,包括底座、转接件和至少两个驱动组件;底座的一端设有用于将其安装在航天器上的安装部、相对的另一端与转接件转动连接,转接件用于连接载荷;驱动组件包括电机、丝杠、主动连杆和随动杆,电机固设于底座上的第一连接构件上,丝杠的一端固连于电机的输出轴、另一端与底座上的第二连接构件转动连接;主动连杆的一端套设并螺纹连接于丝杠、另一端与随动杆铰接,随动杆的另一端与转接件转动连接。本实用新型转接件与底座直接连接,使得连接刚性大,且电机通过驱动丝杠转动进而带动转接件转动,经丝杠减速后,电机
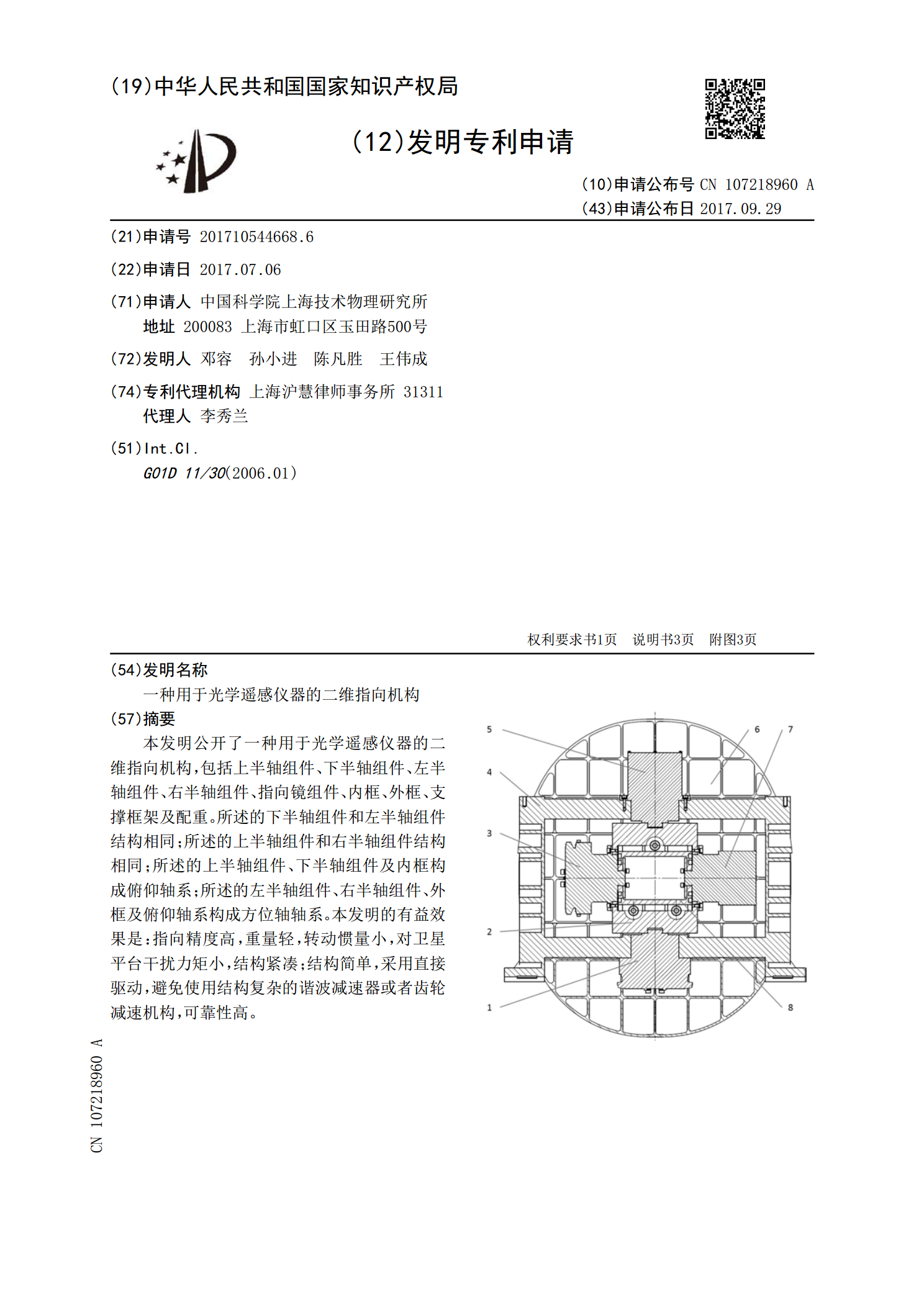
一种用于光学遥感仪器的二维指向机构.pdf
本发明公开了一种用于光学遥感仪器的二维指向机构,包括上半轴组件、下半轴组件、左半轴组件、右半轴组件、指向镜组件、内框、外框、支撑框架及配重。所述的下半轴组件和左半轴组件结构相同;所述的上半轴组件和右半轴组件结构相同;所述的上半轴组件、下半轴组件及内框构成俯仰轴系;所述的左半轴组件、右半轴组件、外框及俯仰轴系构成方位轴轴系。本发明的有益效果是:指向精度高,重量轻,转动惯量小,对卫星平台干扰力矩小,结构紧凑;结构简单,采用直接驱动,避免使用结构复杂的谐波减速器或者齿轮减速机构,可靠性高。