
基于增材再制造点云模型的轮廓提取方法.pdf

康佳****文库

1/10
2/10

3/10
4/10

5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于增材再制造点云模型的轮廓提取方法.pdf
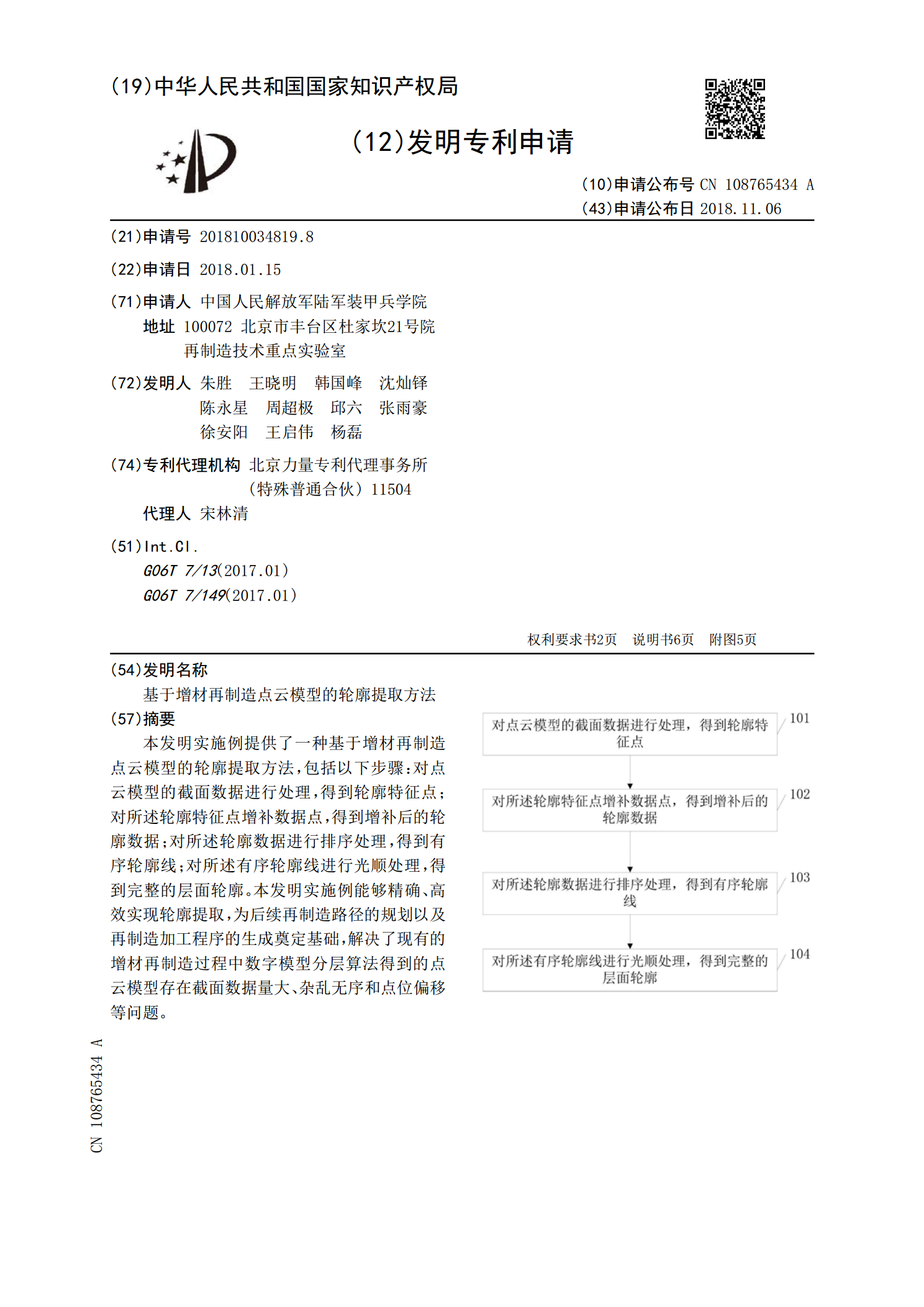
本发明实施例提供了一种基于增材再制造点云模型的轮廓提取方法,包括以下步骤:对点云模型的截面数据进行处理,得到轮廓特征点;对所述轮廓特征点增补数据点,得到增补后的轮廓数据;对所述轮廓数据进行排序处理,得到有序轮廓线;对所述有序轮廓线进行光顺处理,得到完整的层面轮廓。本发明实施例能够精确、高效实现轮廓提取,为后续再制造路径的规划以及再制造加工程序的生成奠定基础,解决了现有的增材再制造过程中数字模型分层算法得到的点云模型存在截面数据量大、杂乱无序和点位偏移等问题。
基于Snake模型的轮廓提取方法.pdf
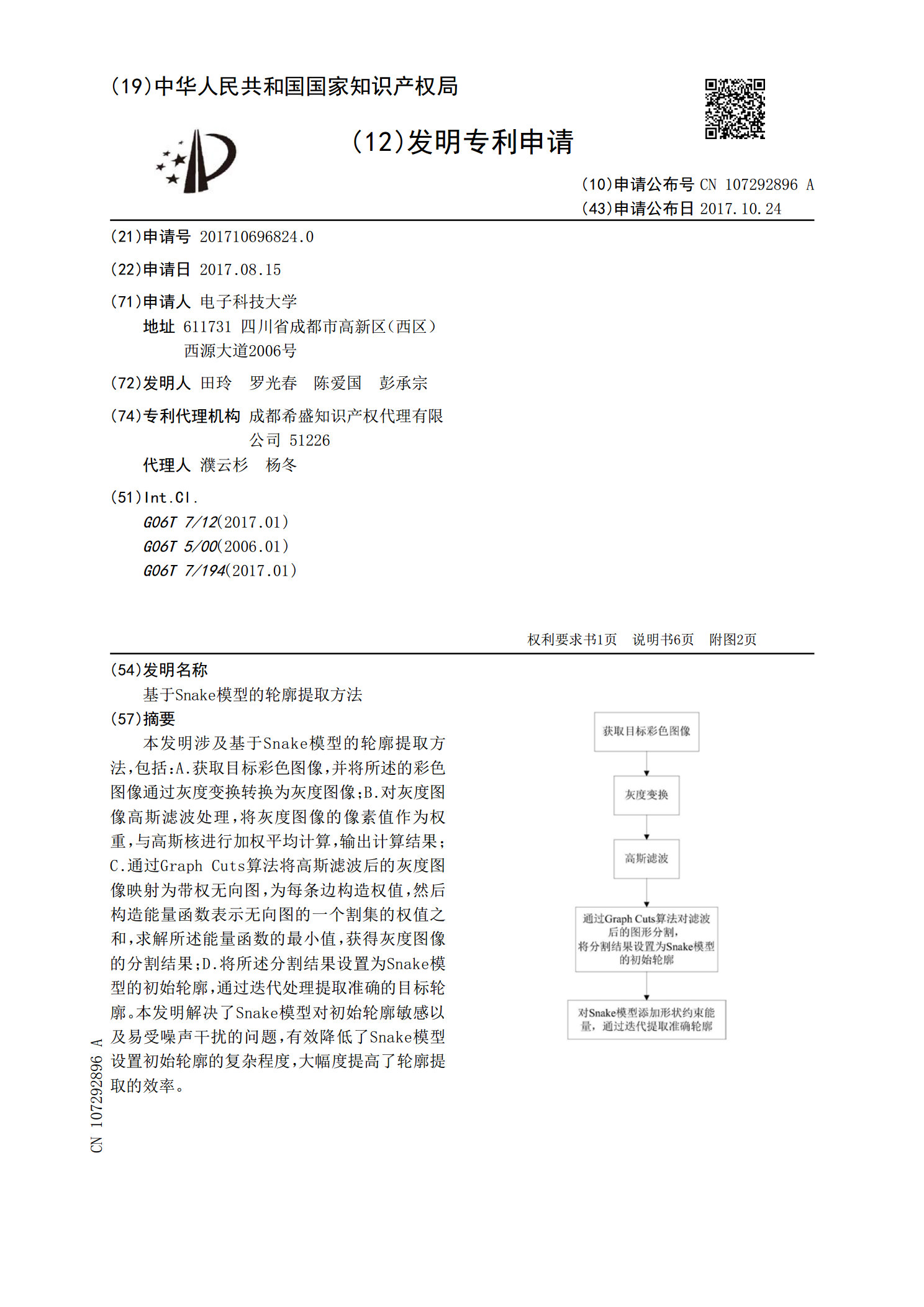
本发明涉及基于Snake模型的轮廓提取方法,包括:A.获取目标彩色图像,并将所述的彩色图像通过灰度变换转换为灰度图像;B.对灰度图像高斯滤波处理,将灰度图像的像素值作为权重,与高斯核进行加权平均计算,输出计算结果;C.通过GraphCuts算法将高斯滤波后的灰度图像映射为带权无向图,为每条边构造权值,然后构造能量函数表示无向图的一个割集的权值之和,求解所述能量函数的最小值,获得灰度图像的分割结果;D.将所述分割结果设置为Snake模型的初始轮廓,通过迭代处理提取准确的目标轮廓。本发明解决了Snake模型

基于LiDAR点云数据的水体轮廓线提取方法研究.docx
基于LiDAR点云数据的水体轮廓线提取方法研究随着科技的不断发展,LiDAR技术逐渐被应用于水体轮廓线的提取。本文将阐述基于LiDAR点云数据的水体轮廓线提取方法的研究。一、LiDAR技术原理LiDAR技术是利用激光雷达的原理来获取地形高程和三维点云数据的技术。LiDAR设备通过发射激光束来扫描地面,激光束照射到地面时会产生反射,激光雷达系统能够接收到反射回来的激光,通过计算激光来回的时间差和光波速度就可以得出激光束到地面的距离。二、水体轮廓线提取方法1、点云分割点云分割是水体轮廓线提取的前置步骤,其目的

柔性增材再制造技术.docx
柔性增材再制造技术柔性增材再制造技术柔性增材再制造技术是一种高效率、低成本的制造技术,能够在不同的生产环境下提供高度的灵活性和适应性。它可以将废旧的材料通过再加工和再利用的方式,转变成新材料,实现资源的再利用和节约,对于可持续发展具有十分重要的意义。本文将介绍柔性增材再制造技术的基本概念、特点、发展现状以及未来发展趋势,旨在让读者对柔性增材再制造技术有更深入的了解。一、基本概念柔性增材再制造技术是一种先进的制造技术,在其生产过程中采用了可重用的材料。这些材料在加工和利用之后,可以再次进行再加工和利用。该技
基于预制基座的增材制造方法.pdf
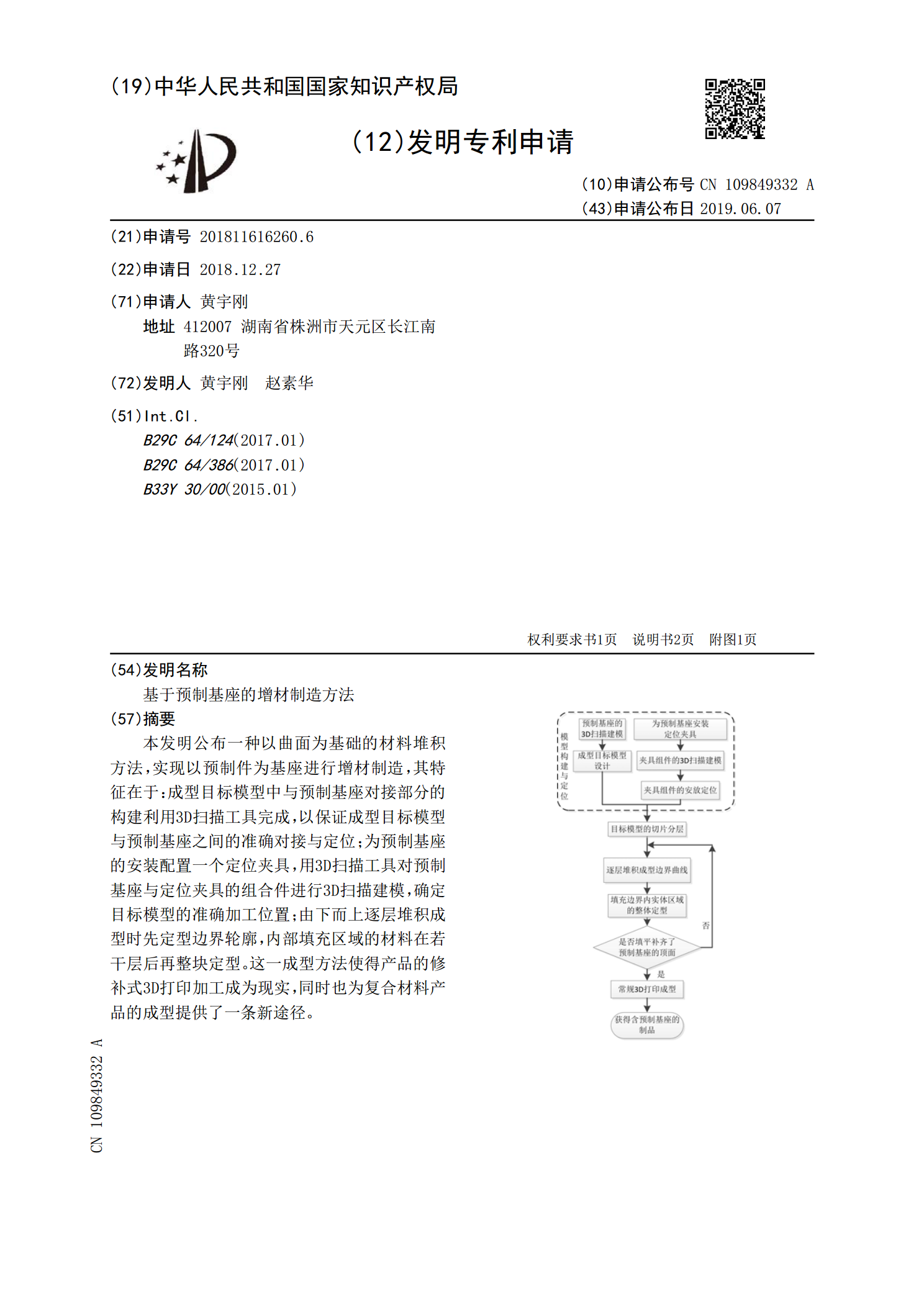
本发明公布一种以曲面为基础的材料堆积方法,实现以预制件为基座进行增材制造,其特征在于:成型目标模型中与预制基座对接部分的构建利用3D扫描工具完成,以保证成型目标模型与预制基座之间的准确对接与定位;为预制基座的安装配置一个定位夹具,用3D扫描工具对预制基座与定位夹具的组合件进行3D扫描建模,确定目标模型的准确加工位置;由下而上逐层堆积成型时先定型边界轮廓,内部填充区域的材料在若干层后再整块定型。这一成型方法使得产品的修补式3D打印加工成为现实,同时也为复合材料产品的成型提供了一条新途径。