
一种可变径管道旋转检测装置.pdf

是秋****写意


1/9

2/9

3/9
4/9

5/9
6/9
7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种可变径管道旋转检测装置.pdf
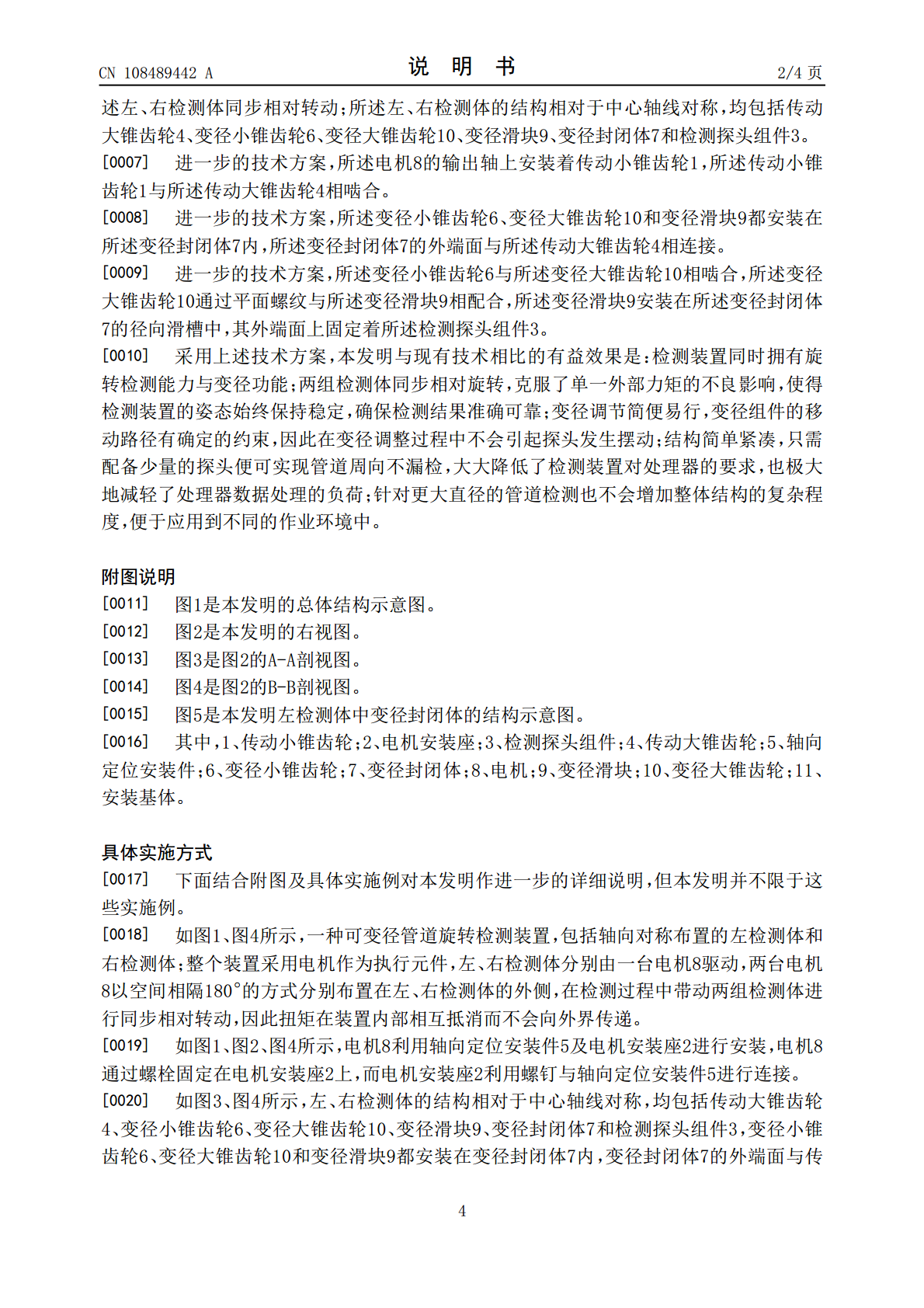
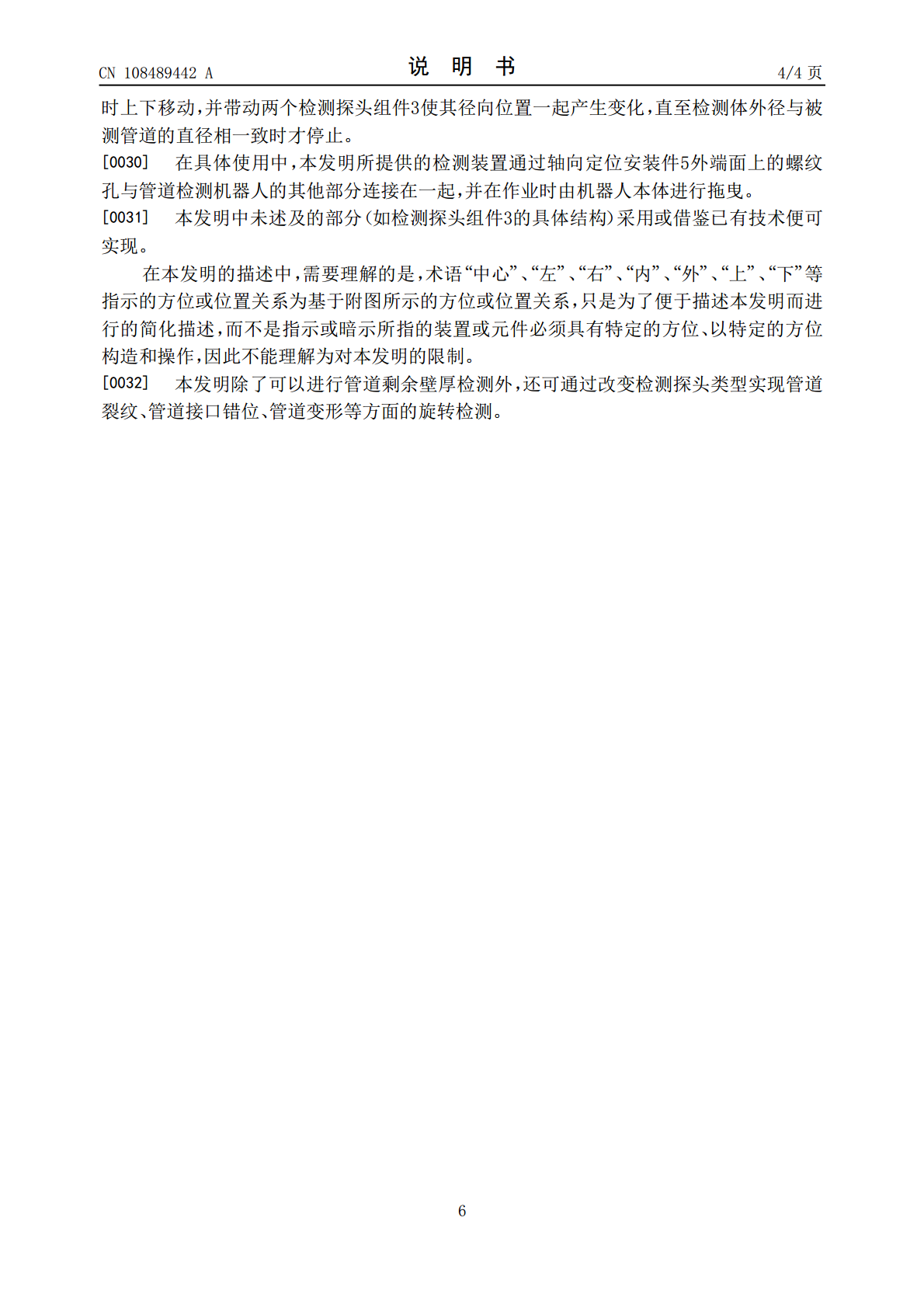
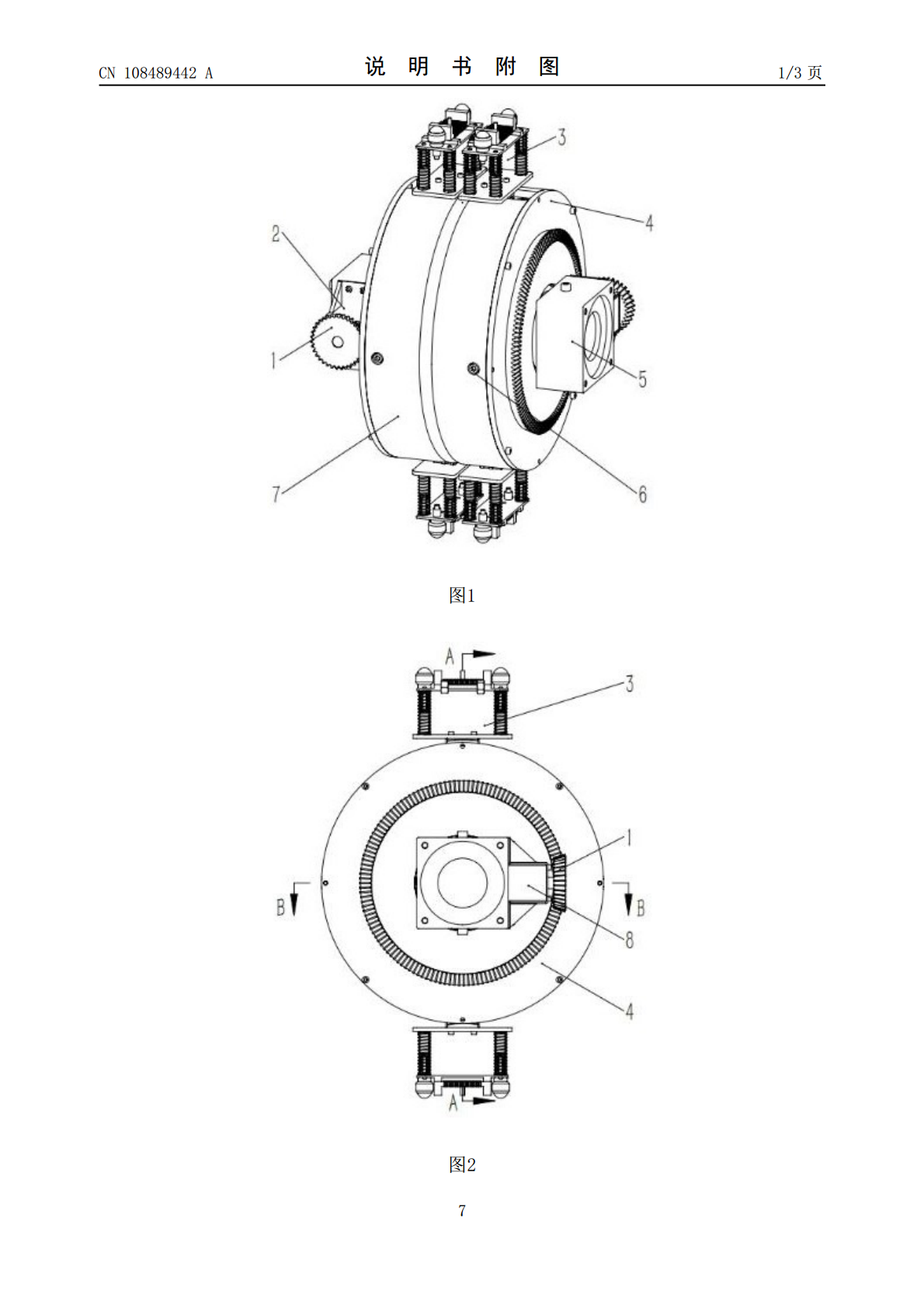
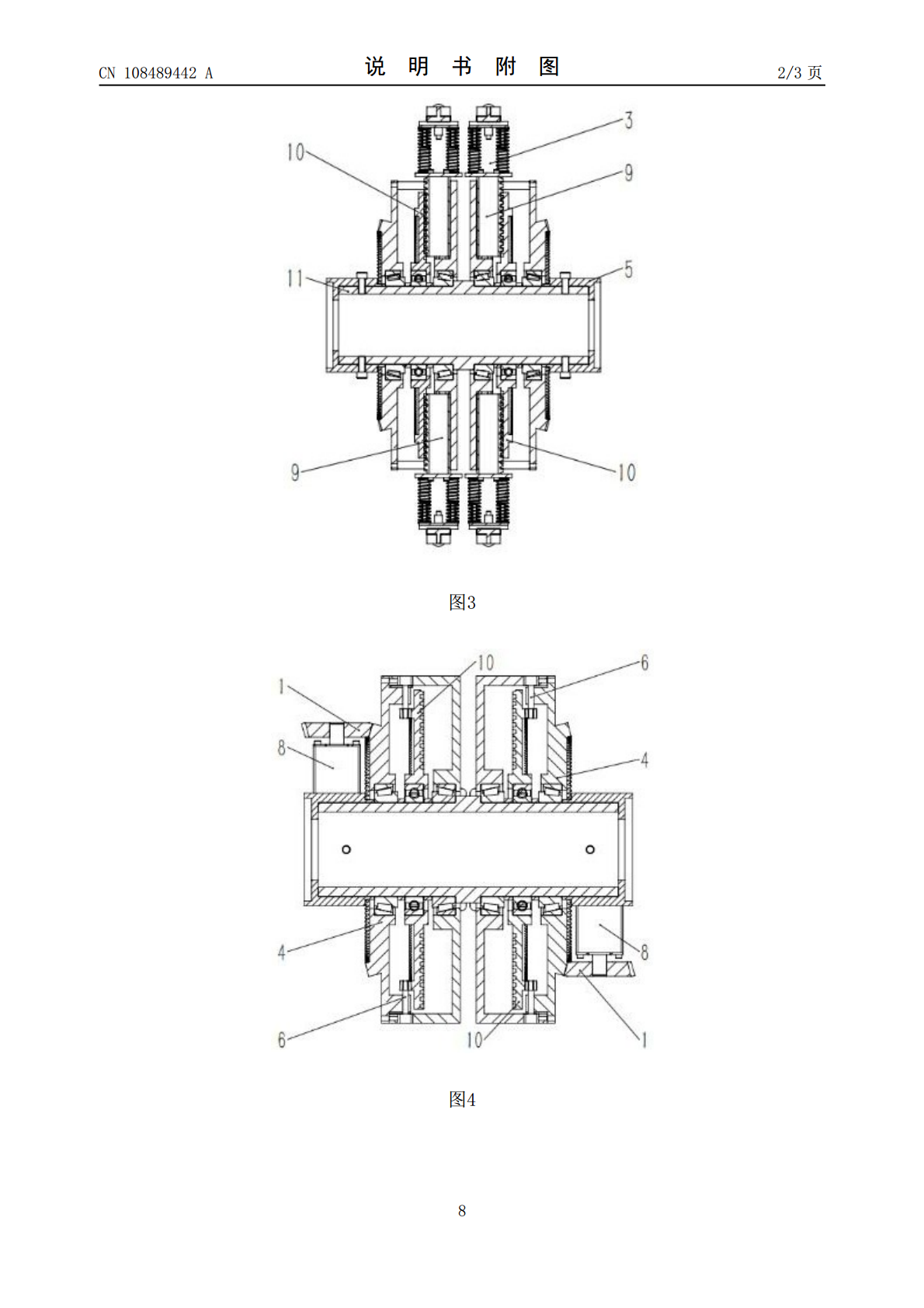
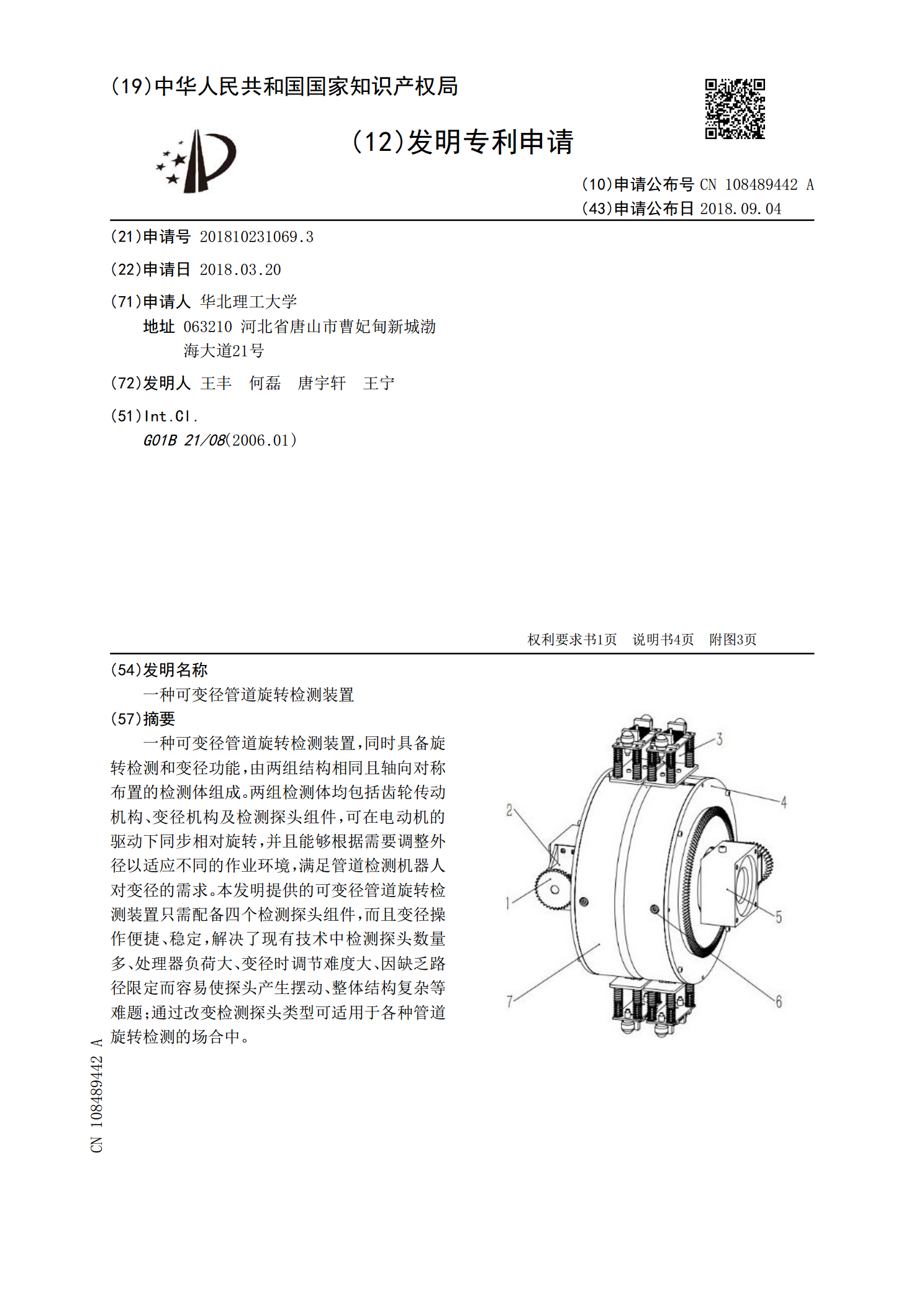
一种可变径管道旋转检测装置,同时具备旋转检测和变径功能,由两组结构相同且轴向对称布置的检测体组成。两组检测体均包括齿轮传动机构、变径机构及检测探头组件,可在电动机的驱动下同步相对旋转,并且能够根据需要调整外径以适应不同的作业环境,满足管道检测机器人对变径的需求。本发明提供的可变径管道旋转检测装置只需配备四个检测探头组件,而且变径操作便捷、稳定,解决了现有技术中检测探头数量多、处理器负荷大、变径时调节难度大、因缺乏路径限定而容易使探头产生摆动、整体结构复杂等难题;通过改变检测探头类型可适用于各种管道旋转检测

一种可变径的旋转杆装置.pdf
本实用新型属于3D生物打印技术领域,特别涉及一种可变径的旋转杆装置,所述装置包括步进电机(1)、传动结构和承载水凝胶结构(6);所述传动结构包括第一连接凸块(21)、第二连接凸块(22)、第一套筒(31)、第二套筒(32)、锥齿轮组(4)、丝杠螺母组(5)和旁路齿轮组(7);所述承载水凝胶结构(6)包括叶片(8)、旋转杆杆片(9)和橡胶膜;本实用新型可实现高效打印内壁褶皱物。旋转杆旋转,同时3D打印机打印喷头沿着杆直线运动,打印效率比通常“种植技术”形成褶皱更快。
一种可变径管道清理装置.pdf
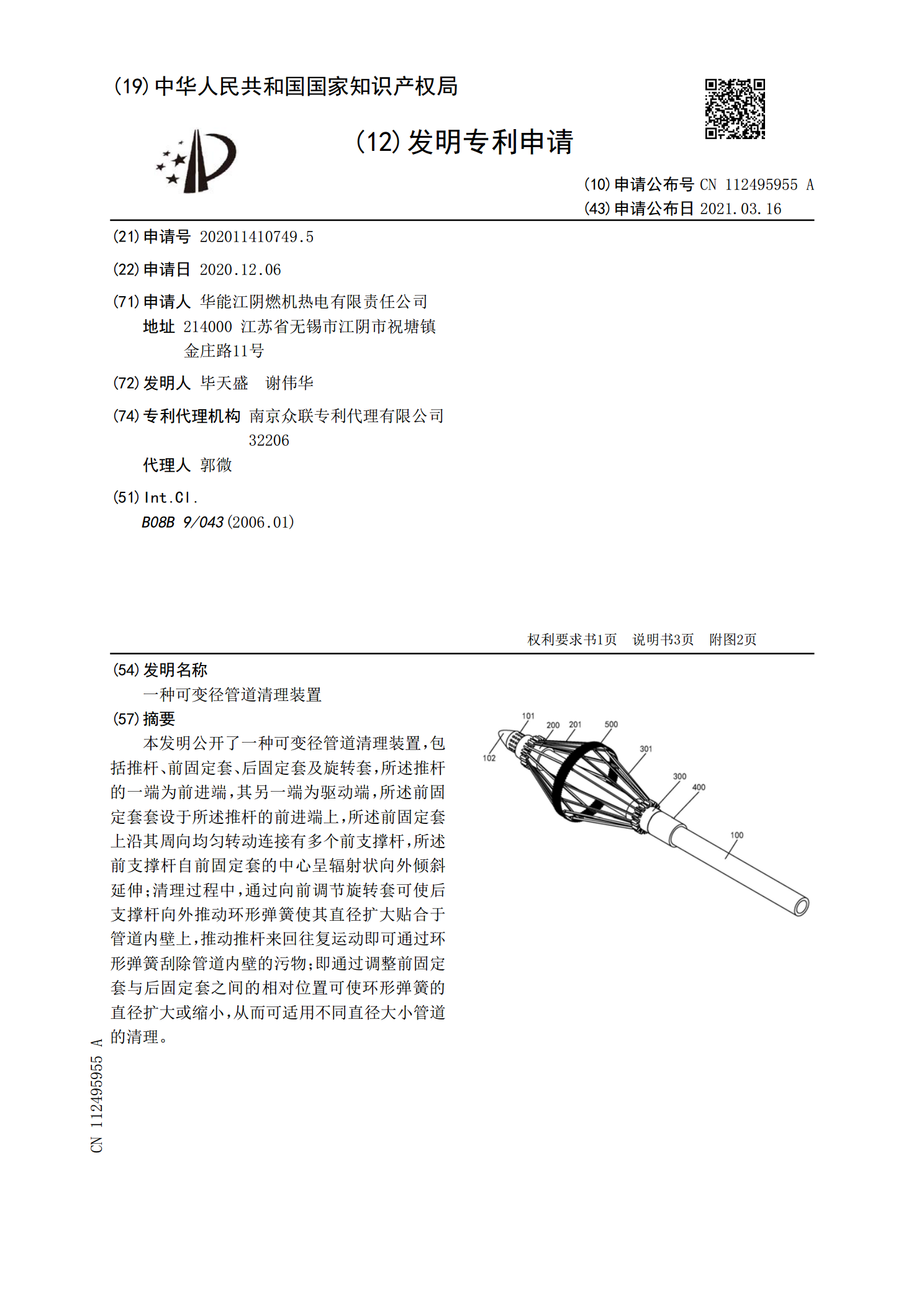
本发明公开了一种可变径管道清理装置,包括推杆、前固定套、后固定套及旋转套,所述推杆的一端为前进端,其另一端为驱动端,所述前固定套套设于所述推杆的前进端上,所述前固定套上沿其周向均匀转动连接有多个前支撑杆,所述前支撑杆自前固定套的中心呈辐射状向外倾斜延伸;清理过程中,通过向前调节旋转套可使后支撑杆向外推动环形弹簧使其直径扩大贴合于管道内壁上,推动推杆来回往复运动即可通过环形弹簧刮除管道内壁的污物;即通过调整前固定套与后固定套之间的相对位置可使环形弹簧的直径扩大或缩小,从而可适用不同直径大小管道的清理。
一种可变径管道检测机器人.pdf
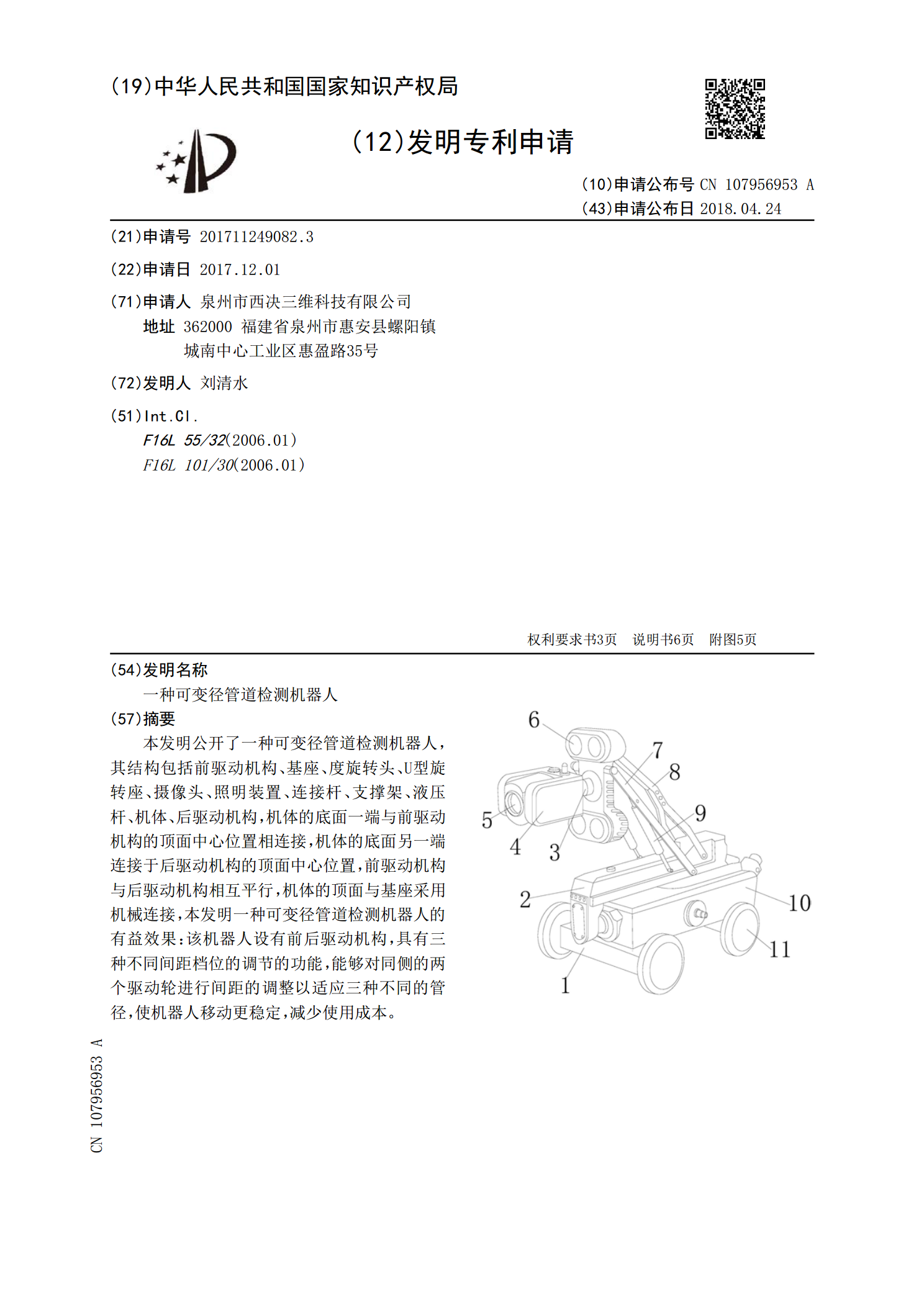
本发明公开了一种可变径管道检测机器人,其结构包括前驱动机构、基座、度旋转头、U型旋转座、摄像头、照明装置、连接杆、支撑架、液压杆、机体、后驱动机构,机体的底面一端与前驱动机构的顶面中心位置相连接,机体的底面另一端连接于后驱动机构的顶面中心位置,前驱动机构与后驱动机构相互平行,机体的顶面与基座采用机械连接,本发明一种可变径管道检测机器人的有益效果:该机器人设有前后驱动机构,具有三种不同间距档位的调节的功能,能够对同侧的两个驱动轮进行间距的调整以适应三种不同的管径,使机器人移动更稳定,减少使用成本。

一种可变径管道检测机器人.pdf
一种可变径管道检测机器人,包括壳体,为整个装置提供动力的行进机构,控制转向的主动转向机构和使整个装置可行使在不同管径的支撑装置;所述行进机构包括两个行进轮、步进电机、减速机、轴承和轴承座,所述两个行进轮呈V型设置,由步进电机提供动力,通过轴承及轴承座连接左右两部分壳体上;所述减速机连接于步进电机和行进轮之间;所述主动转向机构设置在行进机构的后方,包括适用于管道内壁的鼓形转向轮和为转向提供动力的伺服电机;所述支撑装置由四连杆、支撑轮和伸缩杆组成。本发明可变径管道检测机器人,该管道机器人,能够适用于不同管径的