
一种可变径管道检测机器人.pdf

鹏飞****可爱

1/10
2/10

3/10

4/10

5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种可变径管道检测机器人.pdf
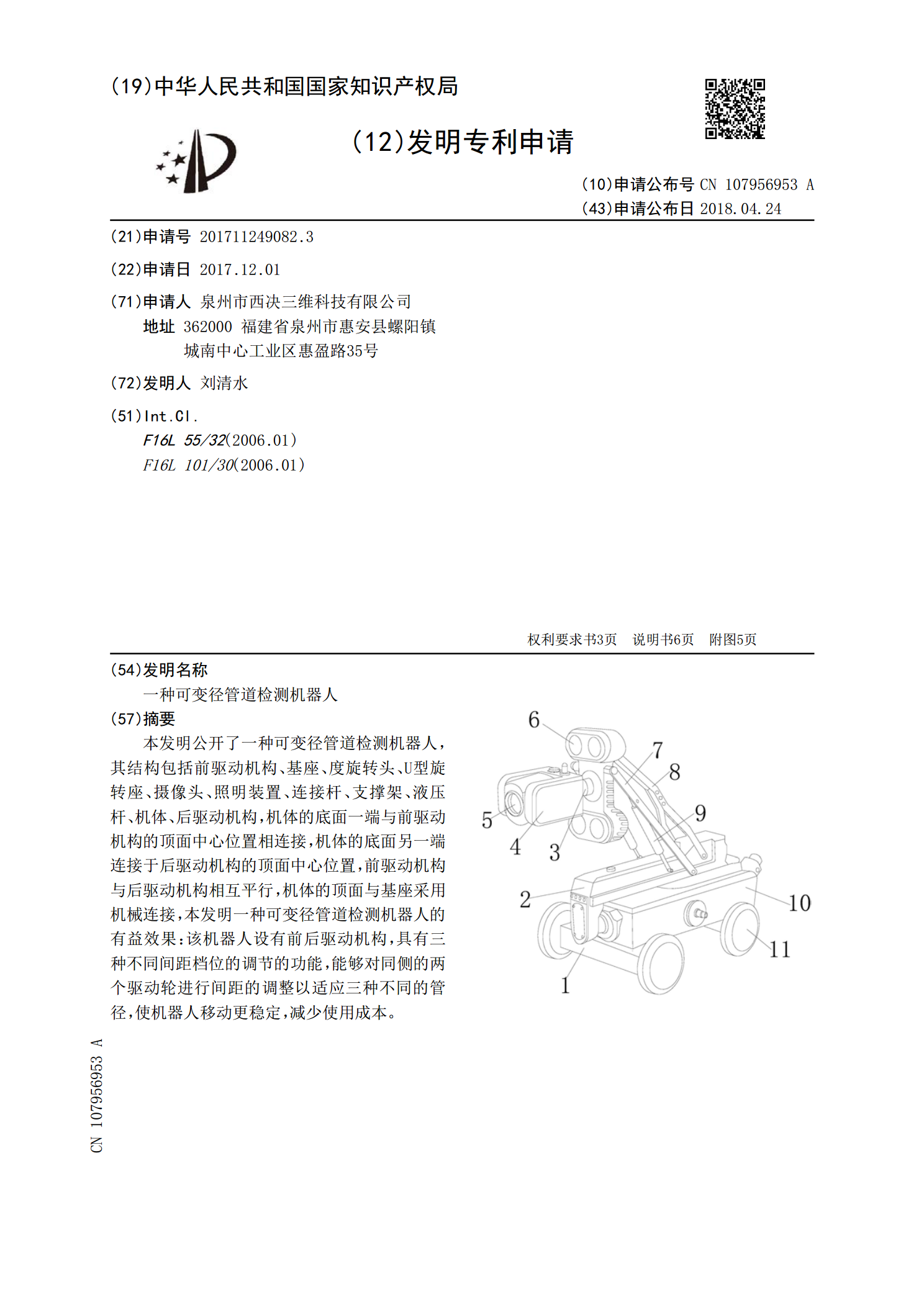
本发明公开了一种可变径管道检测机器人,其结构包括前驱动机构、基座、度旋转头、U型旋转座、摄像头、照明装置、连接杆、支撑架、液压杆、机体、后驱动机构,机体的底面一端与前驱动机构的顶面中心位置相连接,机体的底面另一端连接于后驱动机构的顶面中心位置,前驱动机构与后驱动机构相互平行,机体的顶面与基座采用机械连接,本发明一种可变径管道检测机器人的有益效果:该机器人设有前后驱动机构,具有三种不同间距档位的调节的功能,能够对同侧的两个驱动轮进行间距的调整以适应三种不同的管径,使机器人移动更稳定,减少使用成本。

一种可变径管道检测机器人.pdf
一种可变径管道检测机器人,包括壳体,为整个装置提供动力的行进机构,控制转向的主动转向机构和使整个装置可行使在不同管径的支撑装置;所述行进机构包括两个行进轮、步进电机、减速机、轴承和轴承座,所述两个行进轮呈V型设置,由步进电机提供动力,通过轴承及轴承座连接左右两部分壳体上;所述减速机连接于步进电机和行进轮之间;所述主动转向机构设置在行进机构的后方,包括适用于管道内壁的鼓形转向轮和为转向提供动力的伺服电机;所述支撑装置由四连杆、支撑轮和伸缩杆组成。本发明可变径管道检测机器人,该管道机器人,能够适用于不同管径的
一种可变径管道检测机器人.pdf
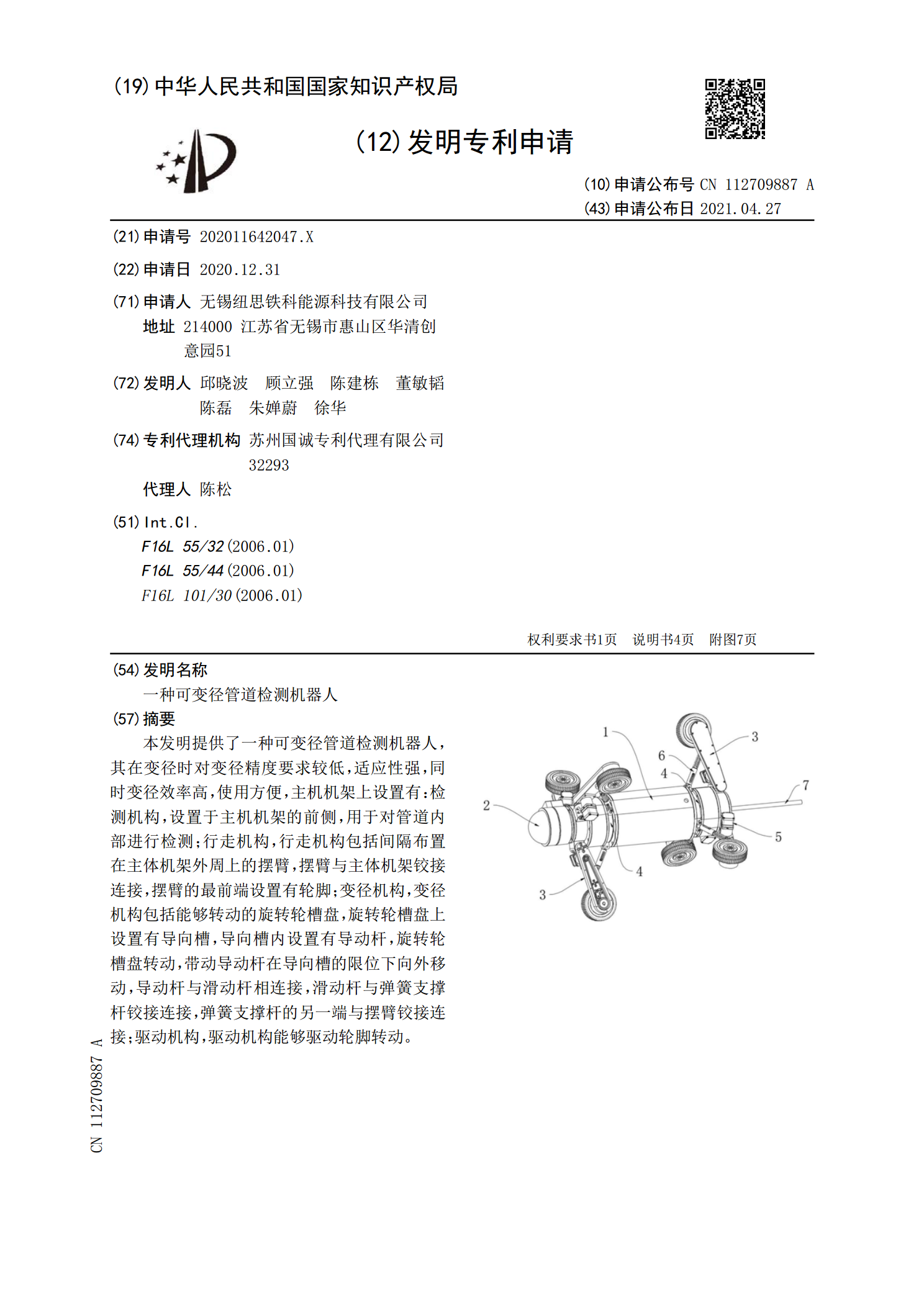
本发明提供了一种可变径管道检测机器人,其在变径时对变径精度要求较低,适应性强,同时变径效率高,使用方便,主机机架上设置有:检测机构,设置于主机机架的前侧,用于对管道内部进行检测;行走机构,行走机构包括间隔布置在主体机架外周上的摆臂,摆臂与主体机架铰接连接,摆臂的最前端设置有轮脚;变径机构,变径机构包括能够转动的旋转轮槽盘,旋转轮槽盘上设置有导向槽,导向槽内设置有导动杆,旋转轮槽盘转动,带动导动杆在导向槽的限位下向外移动,导动杆与滑动杆相连接,滑动杆与弹簧支撑杆铰接连接,弹簧支撑杆的另一端与摆臂铰接连接;驱
一种可变径的管道机器人.pdf
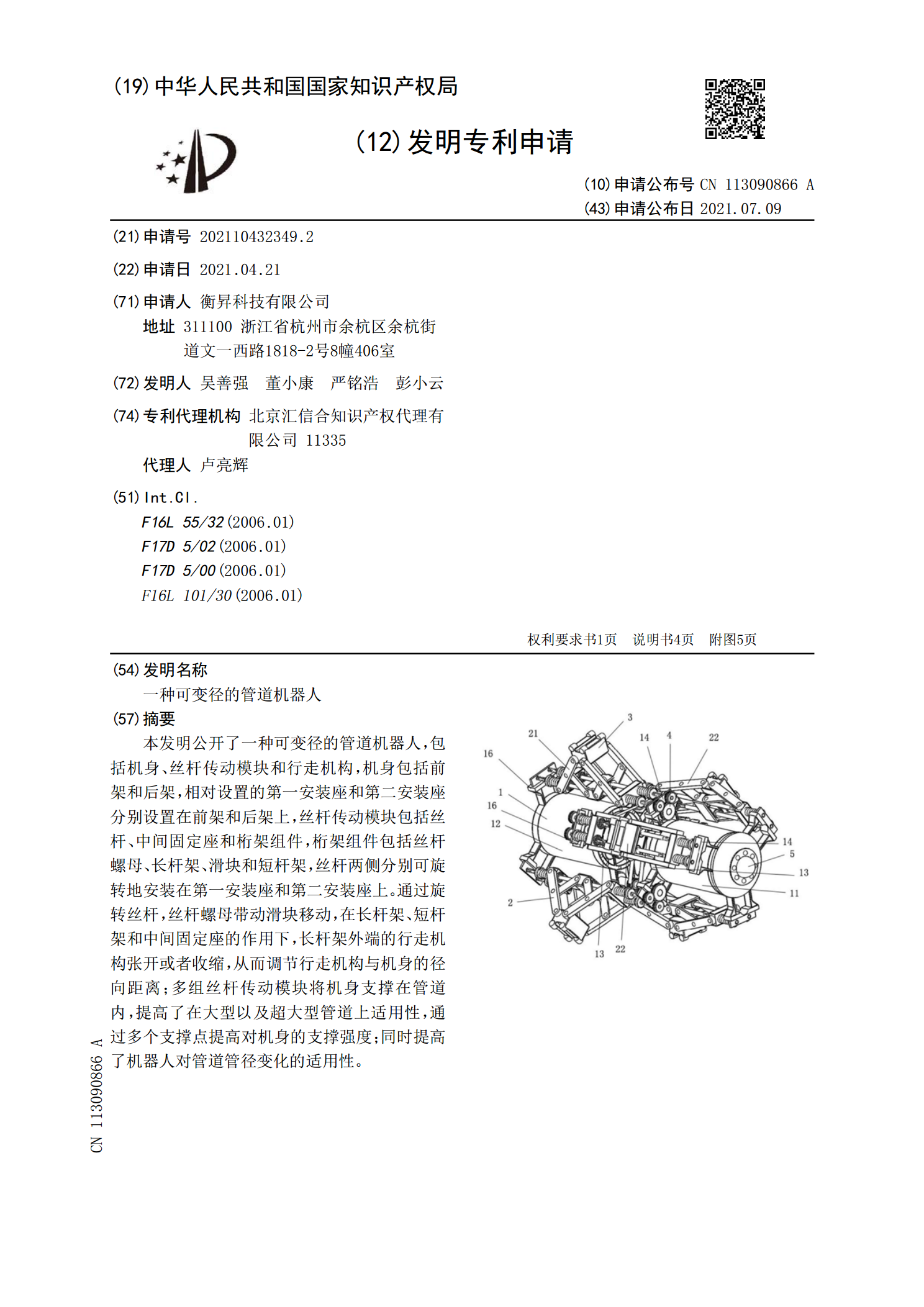
本发明公开了一种可变径的管道机器人,包括机身、丝杆传动模块和行走机构,机身包括前架和后架,相对设置的第一安装座和第二安装座分别设置在前架和后架上,丝杆传动模块包括丝杆、中间固定座和桁架组件,桁架组件包括丝杆螺母、长杆架、滑块和短杆架,丝杆两侧分别可旋转地安装在第一安装座和第二安装座上。通过旋转丝杆,丝杆螺母带动滑块移动,在长杆架、短杆架和中间固定座的作用下,长杆架外端的行走机构张开或者收缩,从而调节行走机构与机身的径向距离;多组丝杆传动模块将机身支撑在管道内,提高了在大型以及超大型管道上适用性,通过多个支
一种可变径管道机器人.pdf
本发明公开了一种可变径管道机器人,包括机身主体,机身主体通过支撑机构与移动机构连接,支撑机构的底部与主动调径机构铰接连接,主动调径机构通过丝杆和光杆安装于机身主体上,支撑机构的顶部与移动机构铰接连接,主动调径机构通过调径伺服电机调整支撑机构的角度,进而实现移动机构的伸展收缩调整,机身主体上设置有用于驱动移动机构行走的驱动机构。本发明通过小孔径检测孔进入不同管径的管道内进行作业,适用范围广泛;采用异形齿轮的传动机构,使得管道机器人机体结构紧凑;通过主动调径机构保证移动机构履带与作业管道的支撑力,能够完成管道