
基于双目立体视觉运动估计方法、电子设备、车辆和介质.pdf

一只****呀9

1/10

2/10

3/10
4/10
5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于双目立体视觉运动估计方法、电子设备、车辆和介质.pdf
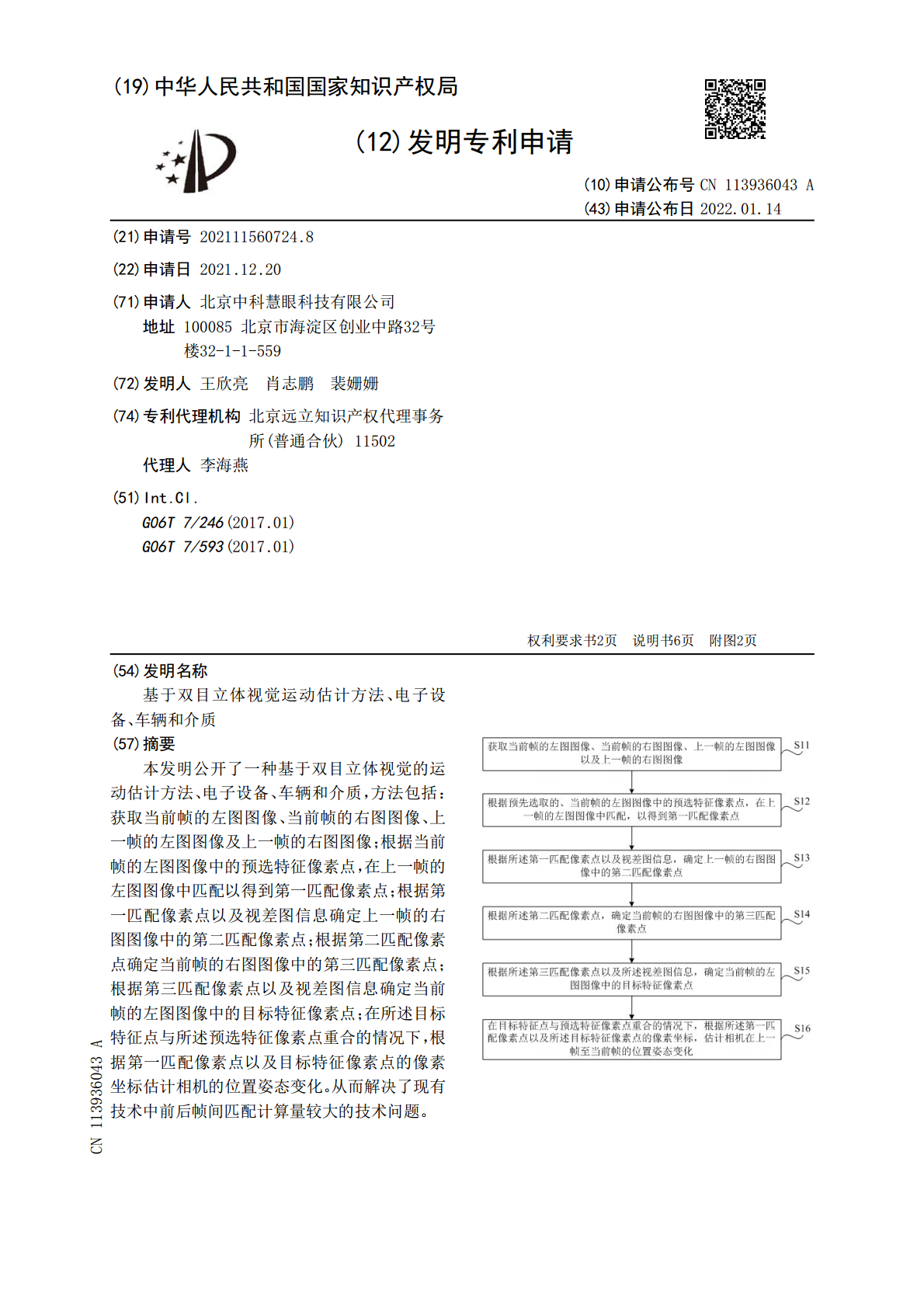
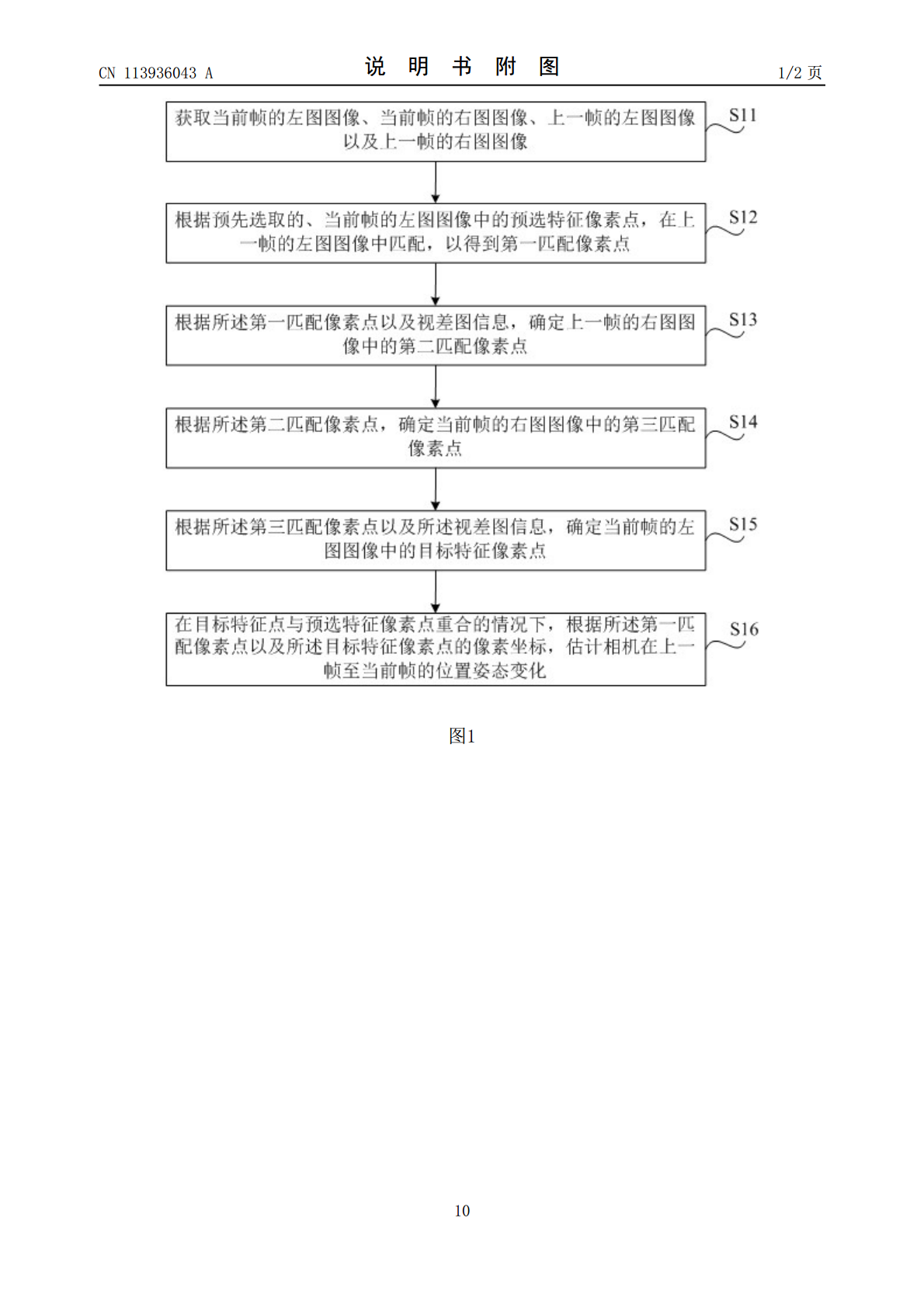
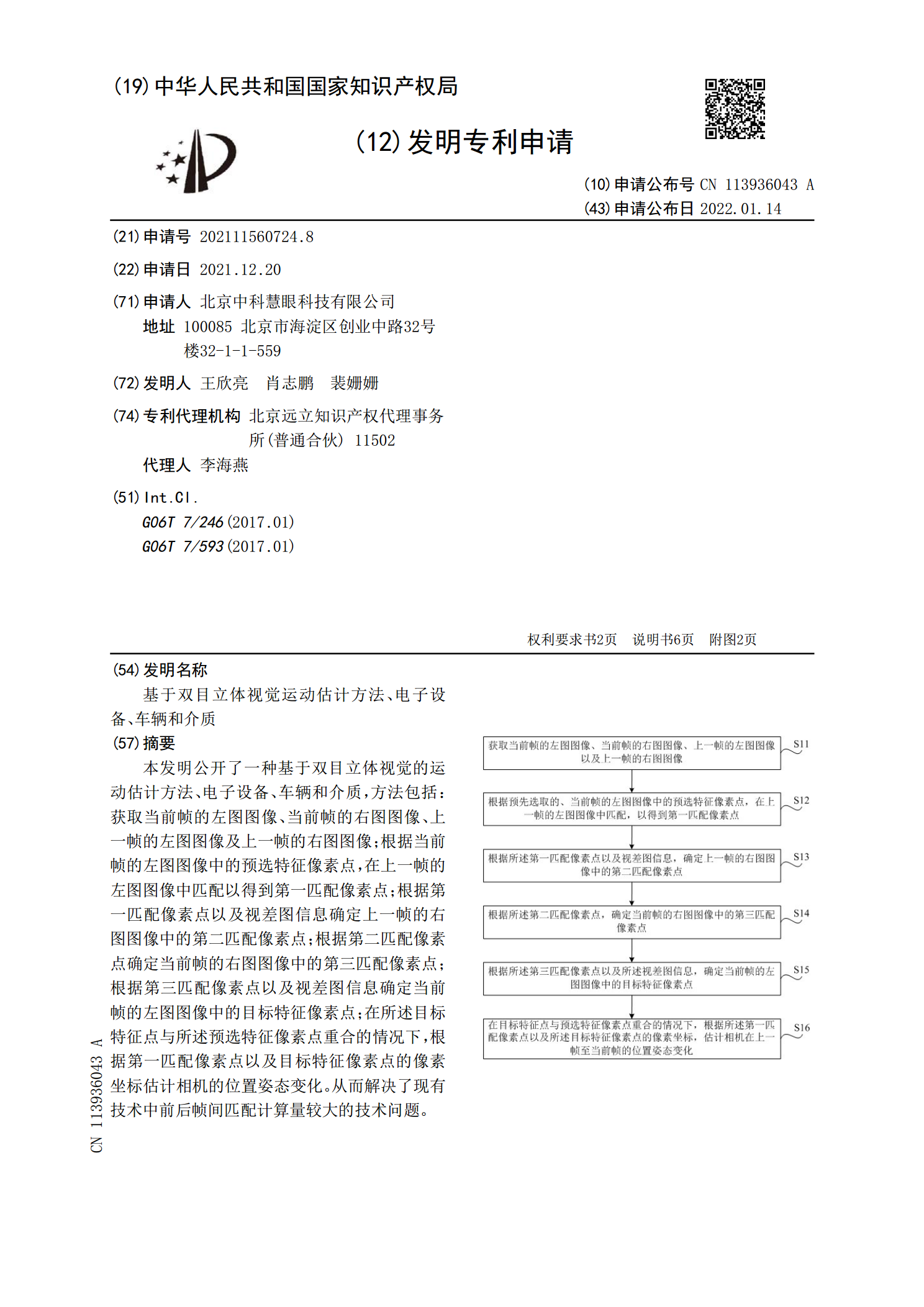
本发明公开了一种基于双目立体视觉的运动估计方法、电子设备、车辆和介质,方法包括:获取当前帧的左图图像、当前帧的右图图像、上一帧的左图图像及上一帧的右图图像;根据当前帧的左图图像中的预选特征像素点,在上一帧的左图图像中匹配以得到第一匹配像素点;根据第一匹配像素点以及视差图信息确定上一帧的右图图像中的第二匹配像素点;根据第二匹配像素点确定当前帧的右图图像中的第三匹配像素点;根据第三匹配像素点以及视差图信息确定当前帧的左图图像中的目标特征像素点;在所述目标特征点与所述预选特征像素点重合的情况下,根据第一匹配像素

基于双目视觉的车辆运动估计技术研究综述报告.docx
基于双目视觉的车辆运动估计技术研究综述报告摘要:车辆运动估计技术在自动驾驶、交通安全、智能交通等领域具有广泛的应用前景。本文对基于双目视觉的车辆运动估计技术研究进行了综述,分别从传统的像素匹配法、光流法,到基于深度学习的卷积神经网络方法和视觉惯性融合方法等方面介绍了相关算法及其优缺点,同时简要分析了其发展趋势。关键词:车辆运动估计;双目视觉;深度学习;视觉惯性融合一、引言随着计算机视觉技术的不断发展,车辆运动估计技术成为了计算机视觉领域内的一个重要研究方向。车辆运动估计旨在从视频序列中提取有关车辆的运动信

基于立体视觉的车辆检测与运动估计方法研究的开题报告.docx
基于立体视觉的车辆检测与运动估计方法研究的开题报告一、选题背景和意义现代社会中,机动车辆的数量不断增加,同时交通事故也日益增多。车辆的检测与运动估计是自动驾驶等应用领域中一个重要的研究方向。而基于立体视觉的车辆检测与运动估计方法是近年来的研究热点之一,其具有精度高、鲁棒性好、能够在复杂环境下实现高效检测等优点。二、研究内容及方法本文将围绕立体视觉的车辆检测与运动估计方法展开研究。首先,对立体视觉技术和车辆检测与运动估计相关理论进行系统的学习和总结。对传统的立体视觉算法(例如基于SIFT特征点匹配的方法、基

基于双目立体视觉系统的景深测量与估计.docx
基于双目立体视觉系统的景深测量与估计双目立体视觉系统是一种常见的三维视觉测量系统,也是一种比较实用的机器视觉估计方法。该系统利用平行摄像机从不同的角度同时捕捉物体的图像,从而实现物体的三维定位、测量与重构等目标。其中,景深测量与估计是双目立体视觉系统的一个重要应用领域。本文将介绍景深测量与估计的原理、方法以及应用方案,并探讨其在现实生活中的应用实例。一、景深测量与估计原理景深指在物体前后离焦平面上的图像清晰程度不同,清晰的范围称为景深区域。景深测量与估计的原理就是通过双目立体视觉方法测量景深范围,然后根据

基于深度学习的双目立体视觉深度估计研究.docx
基于深度学习的双目立体视觉深度估计研究基于深度学习的双目立体视觉深度估计研究摘要:双目立体视觉深度估计是计算机视觉领域的基础问题,对于场景的三维重建、机器人导航和增强现实等应用具有重要意义。本论文基于深度学习的方法,探讨了双目立体视觉深度估计的研究现状和发展趋势。首先,介绍了深度学习在计算机视觉领域的应用背景,并引入了双目立体视觉的原理和相关技术。然后,详细介绍了基于深度学习的双目立体视觉深度估计的研究进展,包括网络模型的设计和训练方法。最后,总结了目前存在的问题和挑战,并提出未来研究的方向,为深度学习在