
一种智能消防机器人.pdf

是飞****文章

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种智能消防机器人.pdf
本发明涉及电子辅助设备技术领域,具体涉及一种智能消防机器人,包括爬行装置、发射装置、提升装置、电动导轨、电动转台、高压水泵摄像头和遥控器,遥控器内嵌有红外发射模块,电动转台内嵌有红外接收模块;提升装置、电动导轨、电动转台和高压水泵的执行电机与红外接收模块电性相连,爬行装置包括机架和滚轮,滚轮安装在机架底部,发射装置和提升装置由外到内对称安装在机架的底部;机架的上部固定安装有电动导轨,电动转台通过滑台安装在电动导轨的上方,电动转台的上方设有高压水泵;本发明有效地解决了中低层建筑消防效率低和灭火效果差的问题。
一种智能消防机器人.pdf
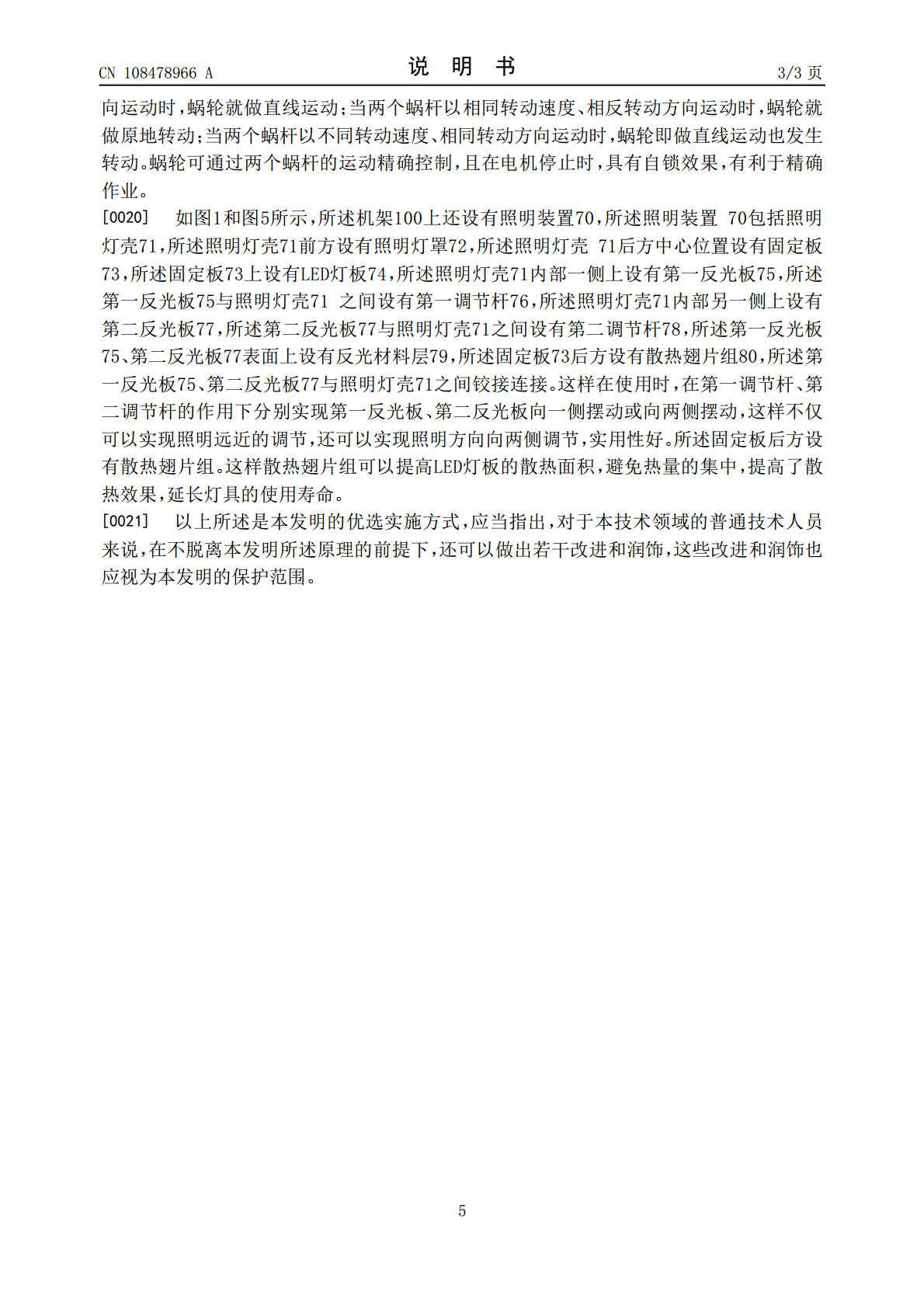
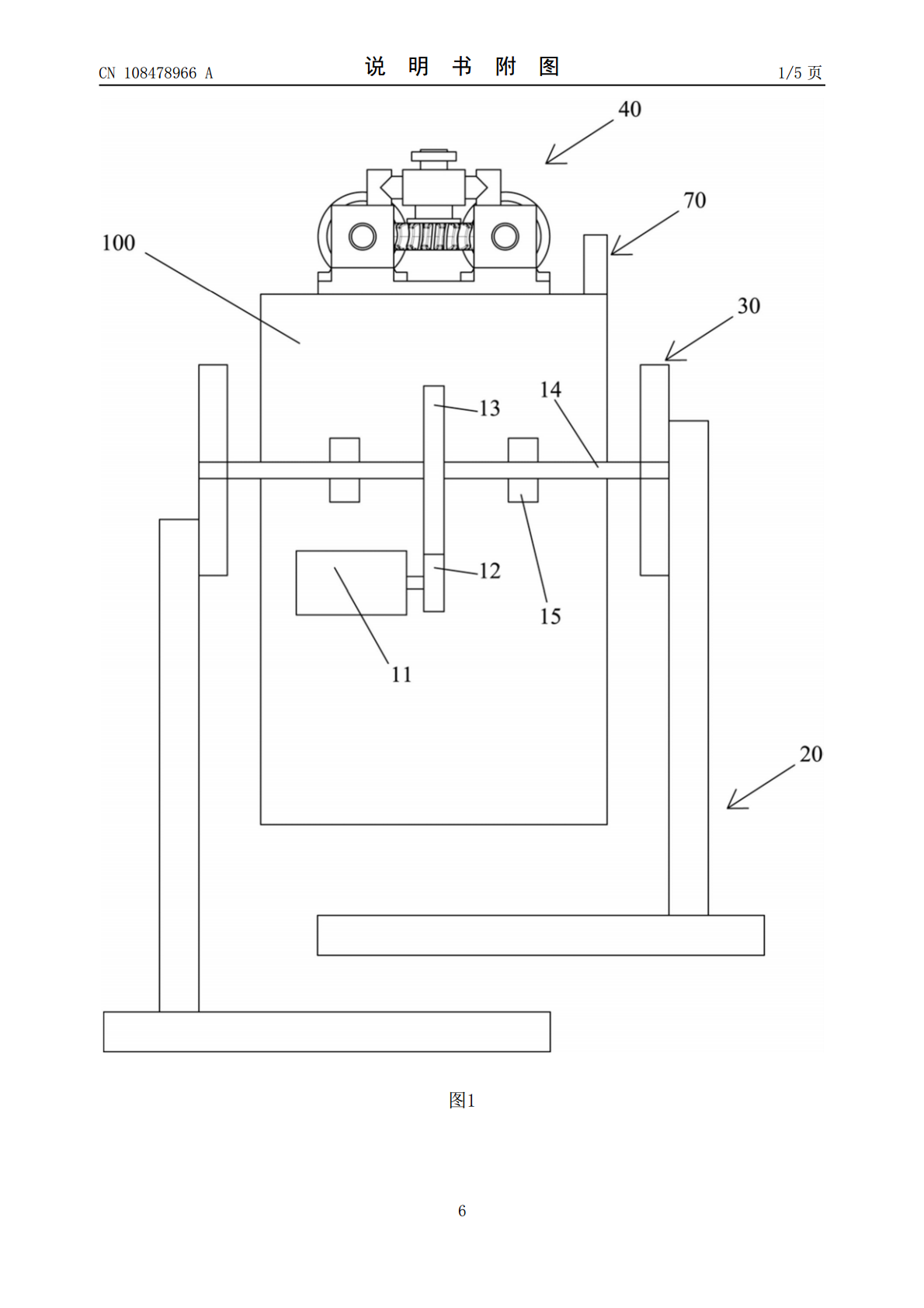
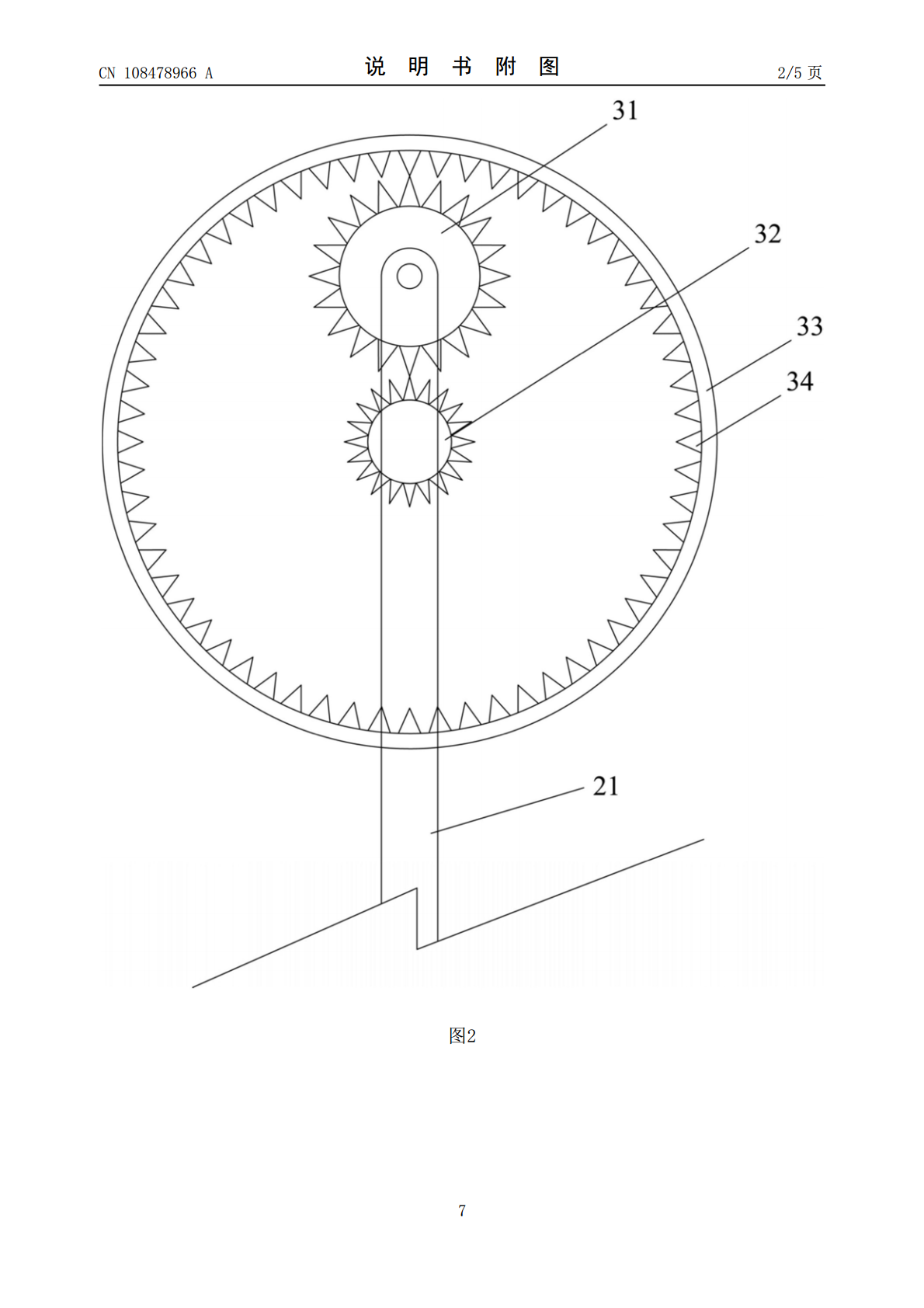
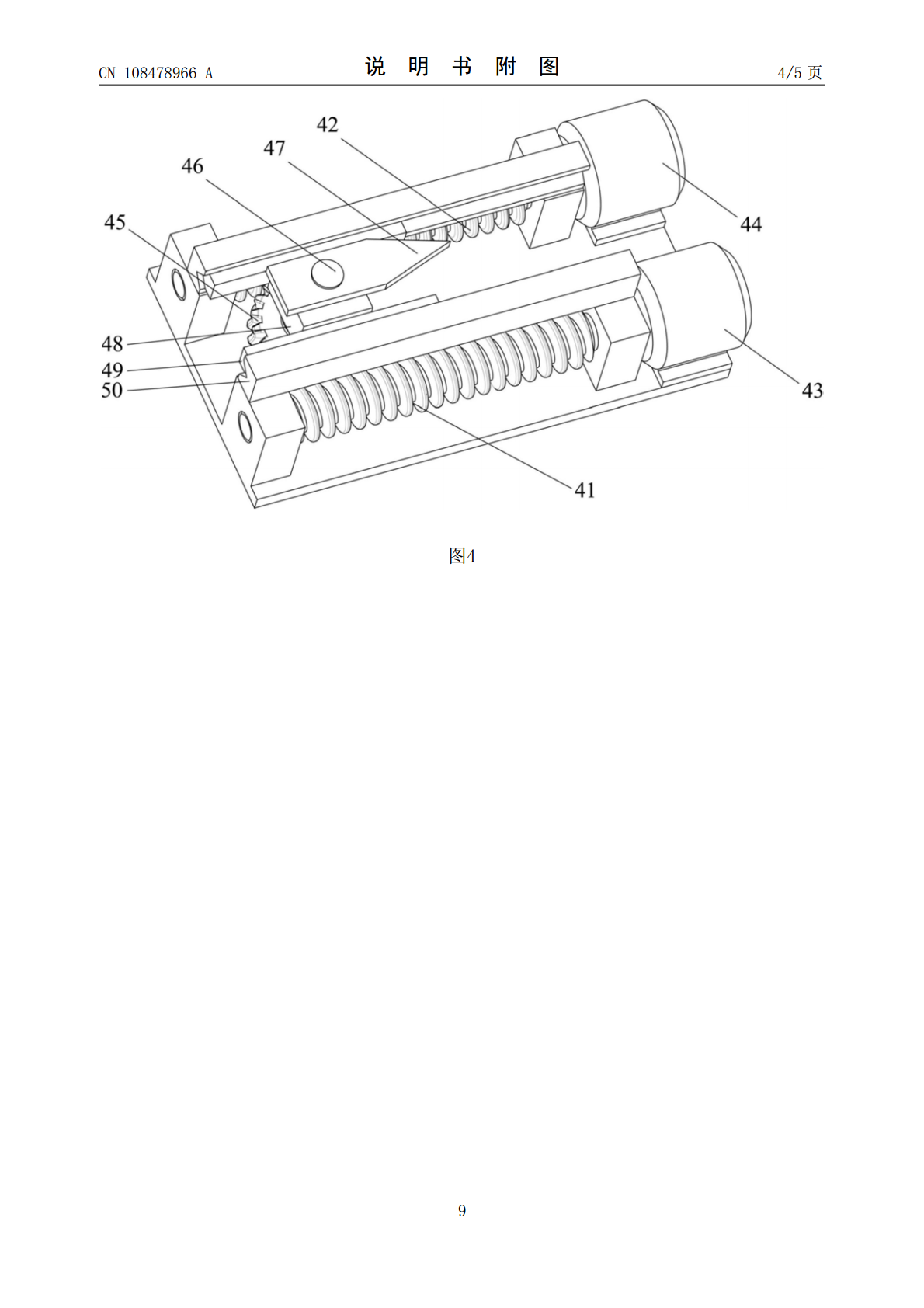
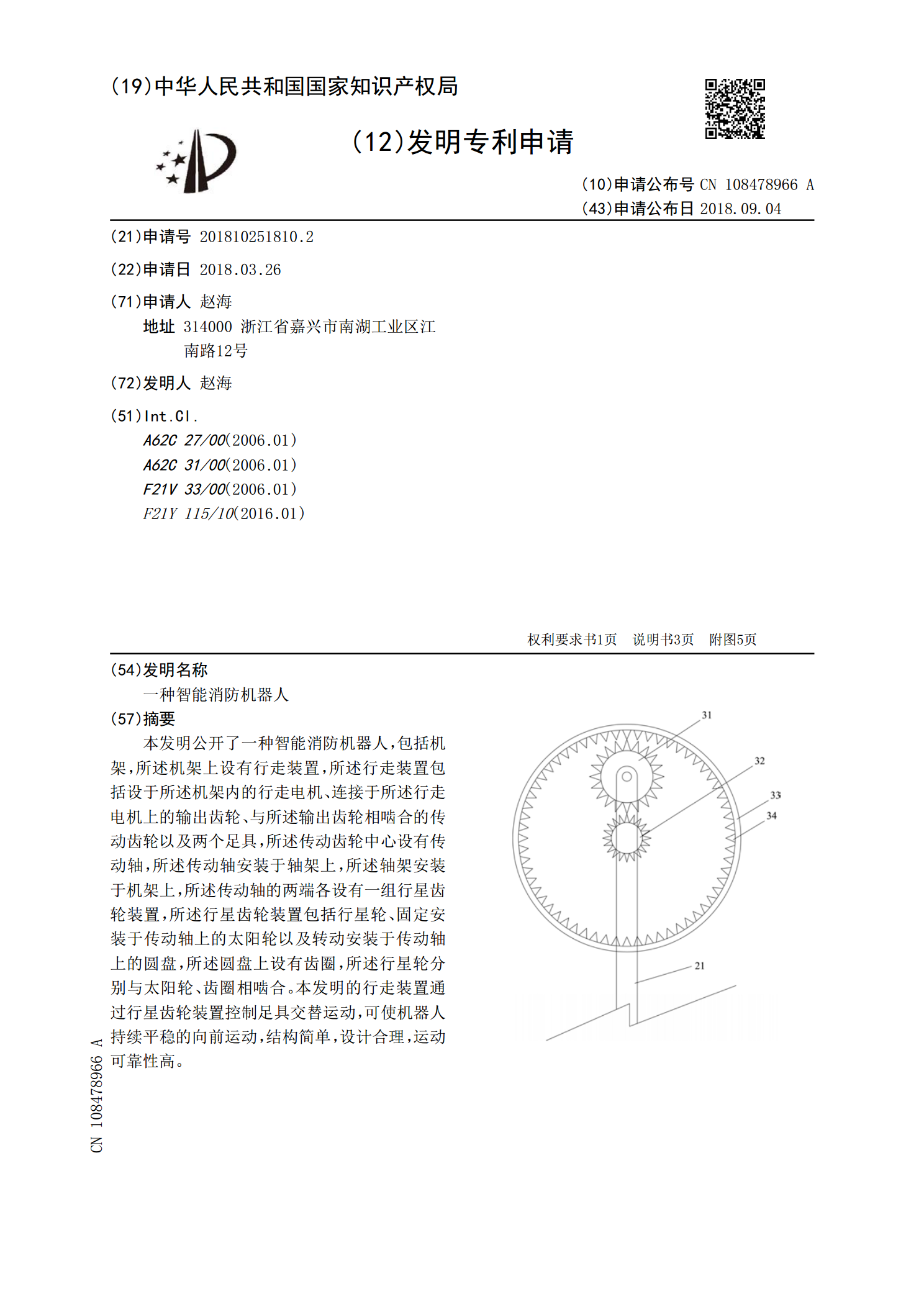
本发明公开了一种智能消防机器人,包括机架,所述机架上设有行走装置,所述行走装置包括设于所述机架内的行走电机、连接于所述行走电机上的输出齿轮、与所述输出齿轮相啮合的传动齿轮以及两个足具,所述传动齿轮中心设有传动轴,所述传动轴安装于轴架上,所述轴架安装于机架上,所述传动轴的两端各设有一组行星齿轮装置,所述行星齿轮装置包括行星轮、固定安装于传动轴上的太阳轮以及转动安装于传动轴上的圆盘,所述圆盘上设有齿圈,所述行星轮分别与太阳轮、齿圈相啮合。本发明的行走装置通过行星齿轮装置控制足具交替运动,可使机器人持续平稳的向
一种智能消防机器人.pdf
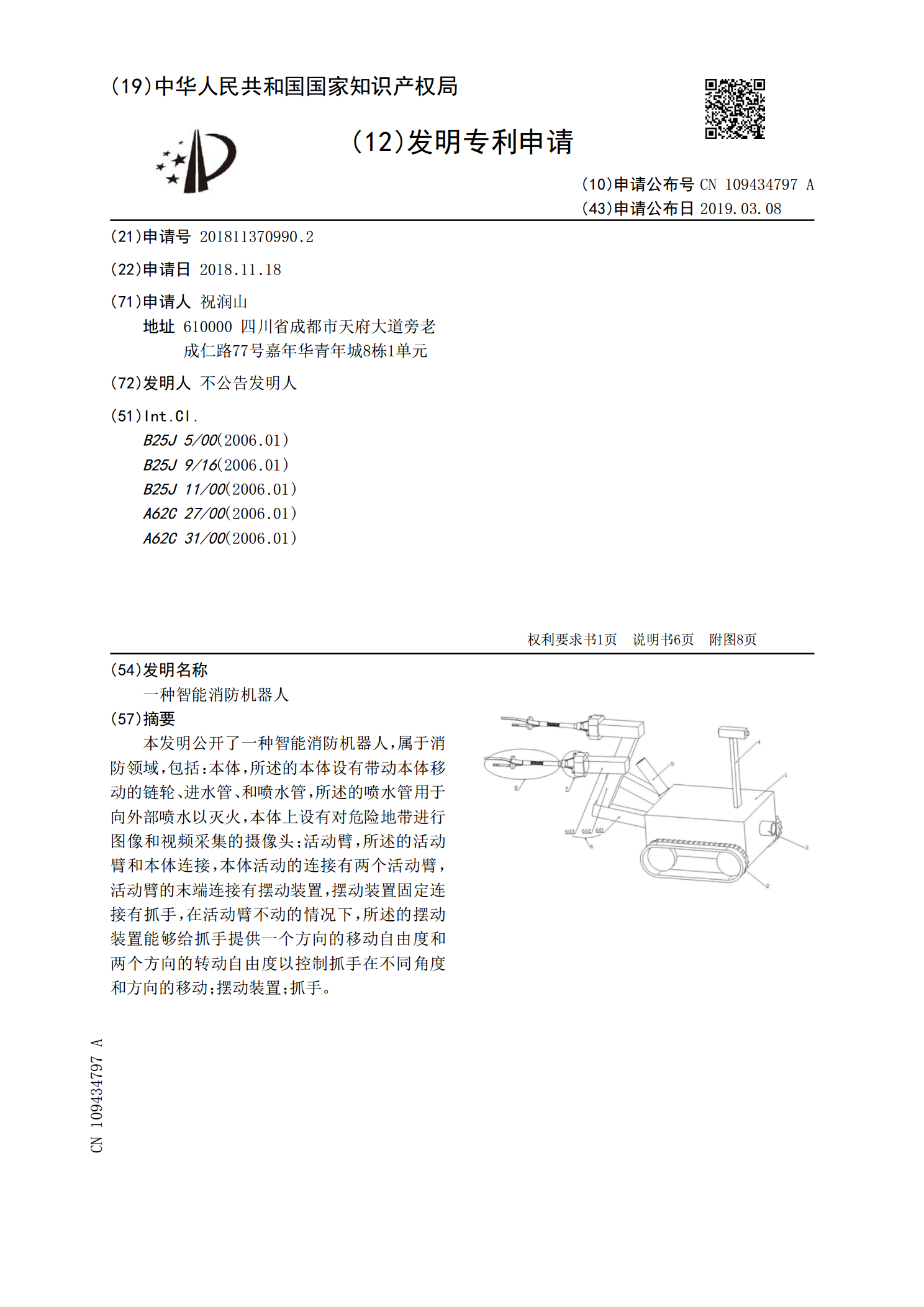
本发明公开了一种智能消防机器人,属于消防领域,包括:本体,所述的本体设有带动本体移动的链轮、进水管、和喷水管,所述的喷水管用于向外部喷水以灭火,本体上设有对危险地带进行图像和视频采集的摄像头;活动臂,所述的活动臂和本体连接,本体活动的连接有两个活动臂,活动臂的末端连接有摆动装置,摆动装置固定连接有抓手,在活动臂不动的情况下,所述的摆动装置能够给抓手提供一个方向的移动自由度和两个方向的转动自由度以控制抓手在不同角度和方向的移动;摆动装置;抓手。
一种消防智能机器人.pdf
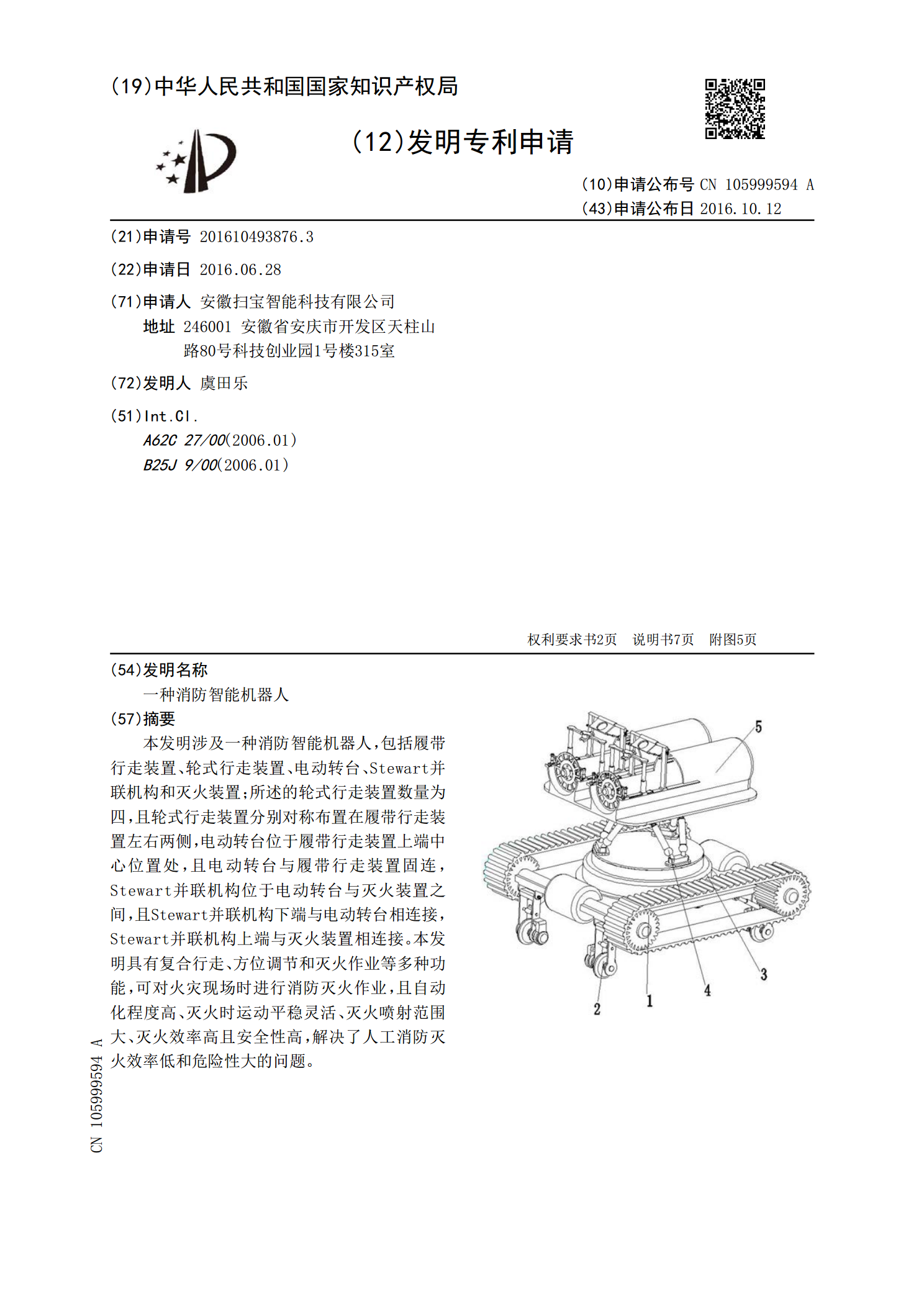
本发明涉及一种消防智能机器人,包括履带行走装置、轮式行走装置、电动转台、Stewart并联机构和灭火装置;所述的轮式行走装置数量为四,且轮式行走装置分别对称布置在履带行走装置左右两侧,电动转台位于履带行走装置上端中心位置处,且电动转台与履带行走装置固连,Stewart并联机构位于电动转台与灭火装置之间,且Stewart并联机构下端与电动转台相连接,Stewart并联机构上端与灭火装置相连接。本发明具有复合行走、方位调节和灭火作业等多种功能,可对火灾现场时进行消防灭火作业,且自动化程度高、灭火时运动平稳灵活
一种智能消防机器人及消防装置.pdf
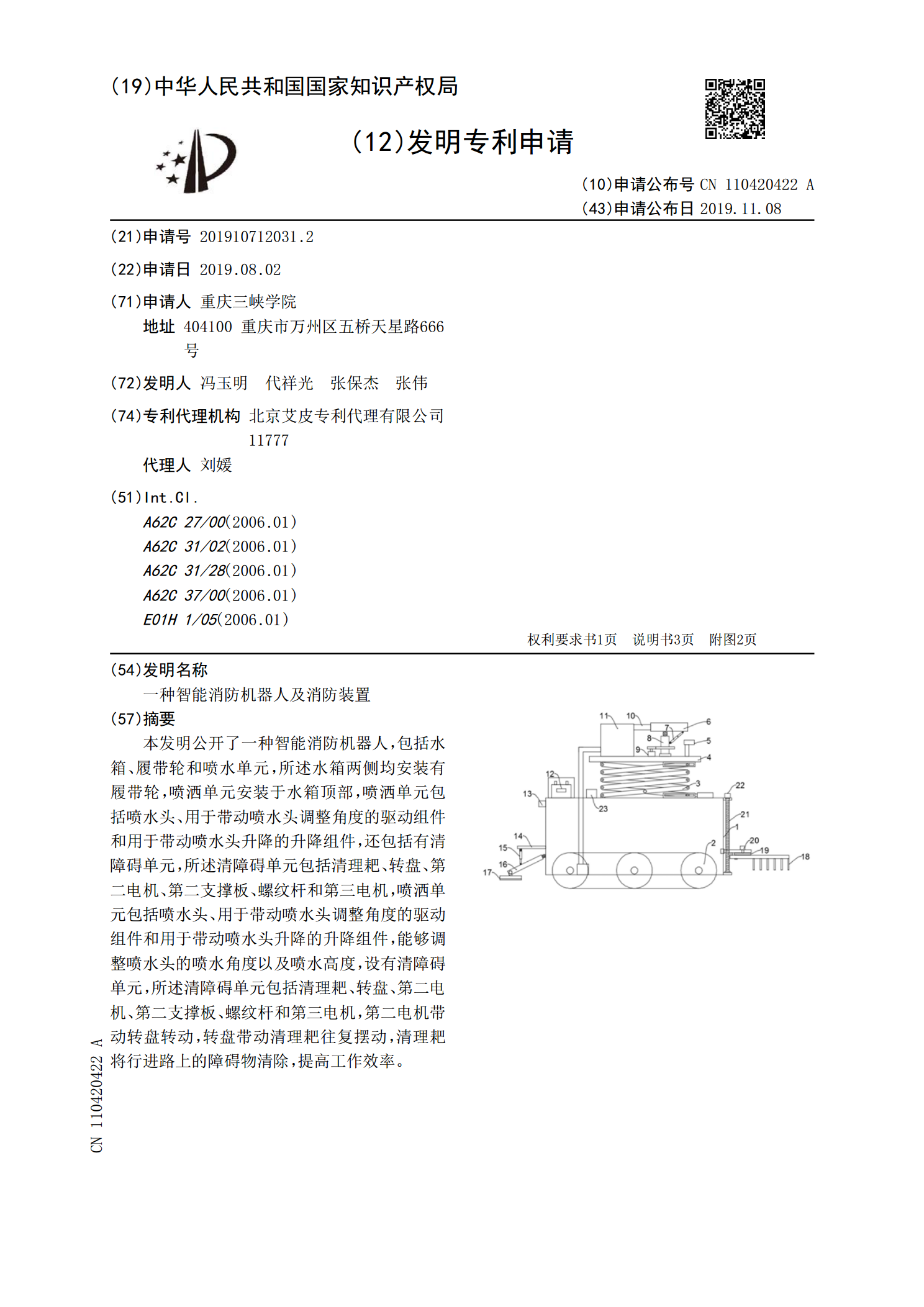
本发明公开了一种智能消防机器人,包括水箱、履带轮和喷水单元,所述水箱两侧均安装有履带轮,喷洒单元安装于水箱顶部,喷洒单元包括喷水头、用于带动喷水头调整角度的驱动组件和用于带动喷水头升降的升降组件,还包括有清障碍单元,所述清障碍单元包括清理耙、转盘、第二电机、第二支撑板、螺纹杆和第三电机,喷洒单元包括喷水头、用于带动喷水头调整角度的驱动组件和用于带动喷水头升降的升降组件,能够调整喷水头的喷水角度以及喷水高度,设有清障碍单元,所述清障碍单元包括清理耙、转盘、第二电机、第二支撑板、螺纹杆和第三电机,第二电机带动