
车辆控制装置及其控制方法.pdf

志玉****爱啊

1/10

2/10

3/10

4/10

5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

车辆控制装置及其控制方法.pdf
本发明公开一种车辆控制装置及其控制方法。该装置包括:输入部,接收由感测装置感测的车轮滑移值;计算部,接收输入的车轮滑移值,并利用滑移预测模型信息,基于车轮滑移值中的以往的车轮滑移值和当前车轮滑移值,计算车轮滑移预测值;判断部,基于计算出的车轮滑移预测值,判断是否为从高摩擦路面向低摩擦路面移动的第一状态,当判断为第一状态时,比较计算出的车轮滑移预测值与设定的目标滑移预测值的范围,并判断将EPB装置的操作状态控制为施加状态、终止状态及释放状态中的哪一种状态;以及控制部,当判断为第一状态时,将对应于施加状态的施

车辆的控制装置及其控制方法.pdf
本发明涉及一种车辆的控制装置及其控制方法,在发动机(1)的转速比释放转速低时则释放锁止离合器(2c)的车辆的控制装置中,基于将滑行线的初级带轮转速(Npri)设定得比驱动线中的初级带轮转速(Npri)高的变速图而变更变速机构(20)的变速比,进行加速踏板开度(APO)成为第一规定开度以下的加速踏板(51)的操作的情况下,将变速机构(20)的目标输入转速(Nint)设定为比驱动线中的初级带轮转速(Npri)高的规定目标输入转速(Nintp)。由此,本发明能够抑制因摩擦联接元件即锁止离合器(2c)被释放产生的

车辆控制装置及其控制方法.pdf
一种车辆控制装置,其中,在判定为摩擦联接元件(32、33、34)相对于联接指示未联接的情况下,基于摩擦联接元件(32、33、34)的指示扭矩容量和由无级变速机构(20)的输入扭矩算出的带容量算出目标管路压,在算出的目标管路压比上限管路压高的情况下,基于上限管路压算出驱动源(1)的扭矩降低量,在判定为摩擦联接元件(32、33、34)未联接的情况下,基于输入扭矩和由实际管路压算出的带容量算出摩擦联接元件(32、33、34)的限制扭矩容量,在判定为摩擦联接元件(32、33、34)未联接的情况下,基于目标管路压、
车辆控制装置及其控制方法.pdf
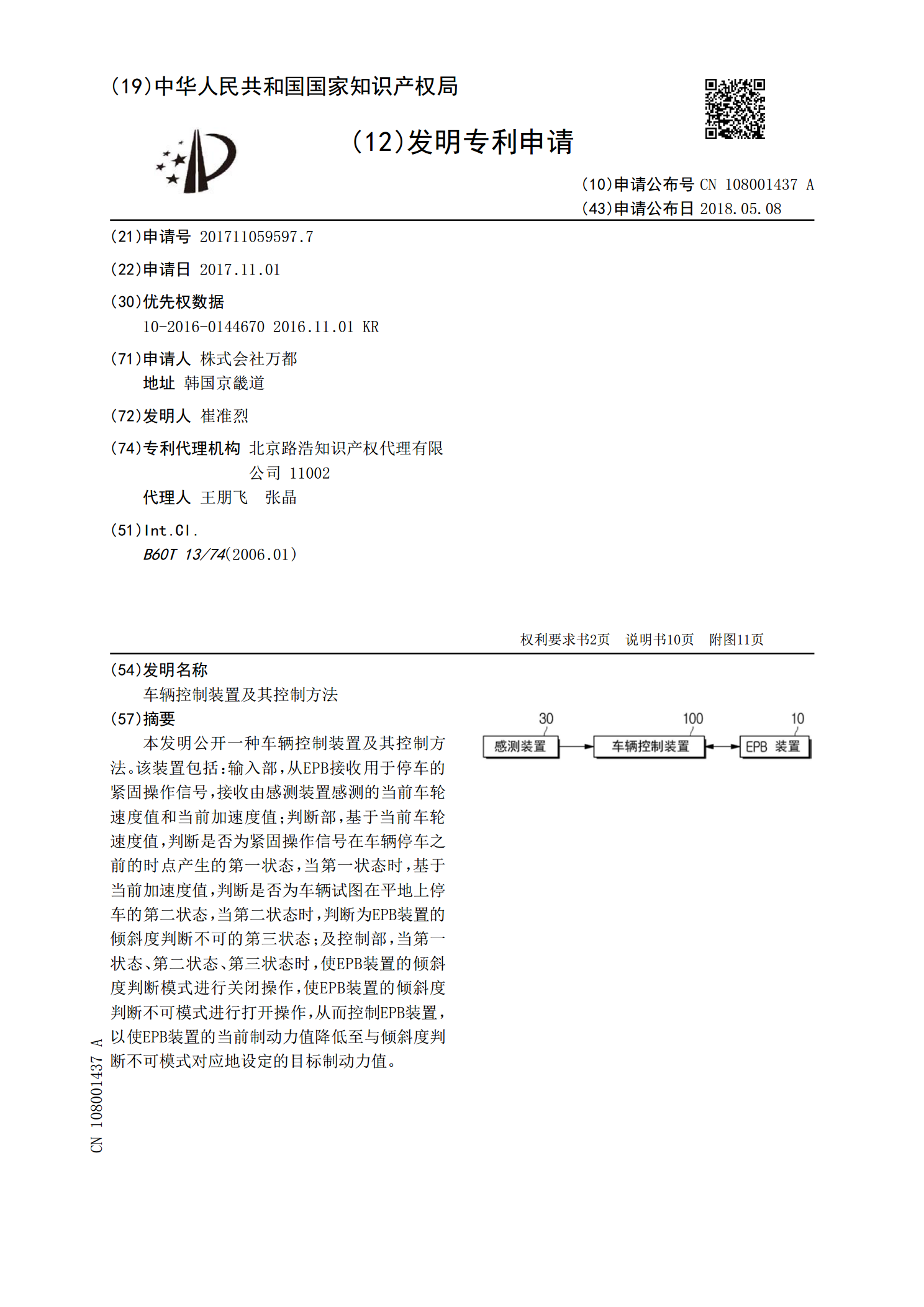
本发明公开一种车辆控制装置及其控制方法。该装置包括:输入部,从EPB接收用于停车的紧固操作信号,接收由感测装置感测的当前车轮速度值和当前加速度值;判断部,基于当前车轮速度值,判断是否为紧固操作信号在车辆停车之前的时点产生的第一状态,当第一状态时,基于当前加速度值,判断是否为车辆试图在平地上停车的第二状态,当第二状态时,判断为EPB装置的倾斜度判断不可的第三状态;及控制部,当第一状态、第二状态、第三状态时,使EPB装置的倾斜度判断模式进行关闭操作,使EPB装置的倾斜度判断不可模式进行打开操作,从而控制EPB
车辆控制装置及其控制方法.pdf
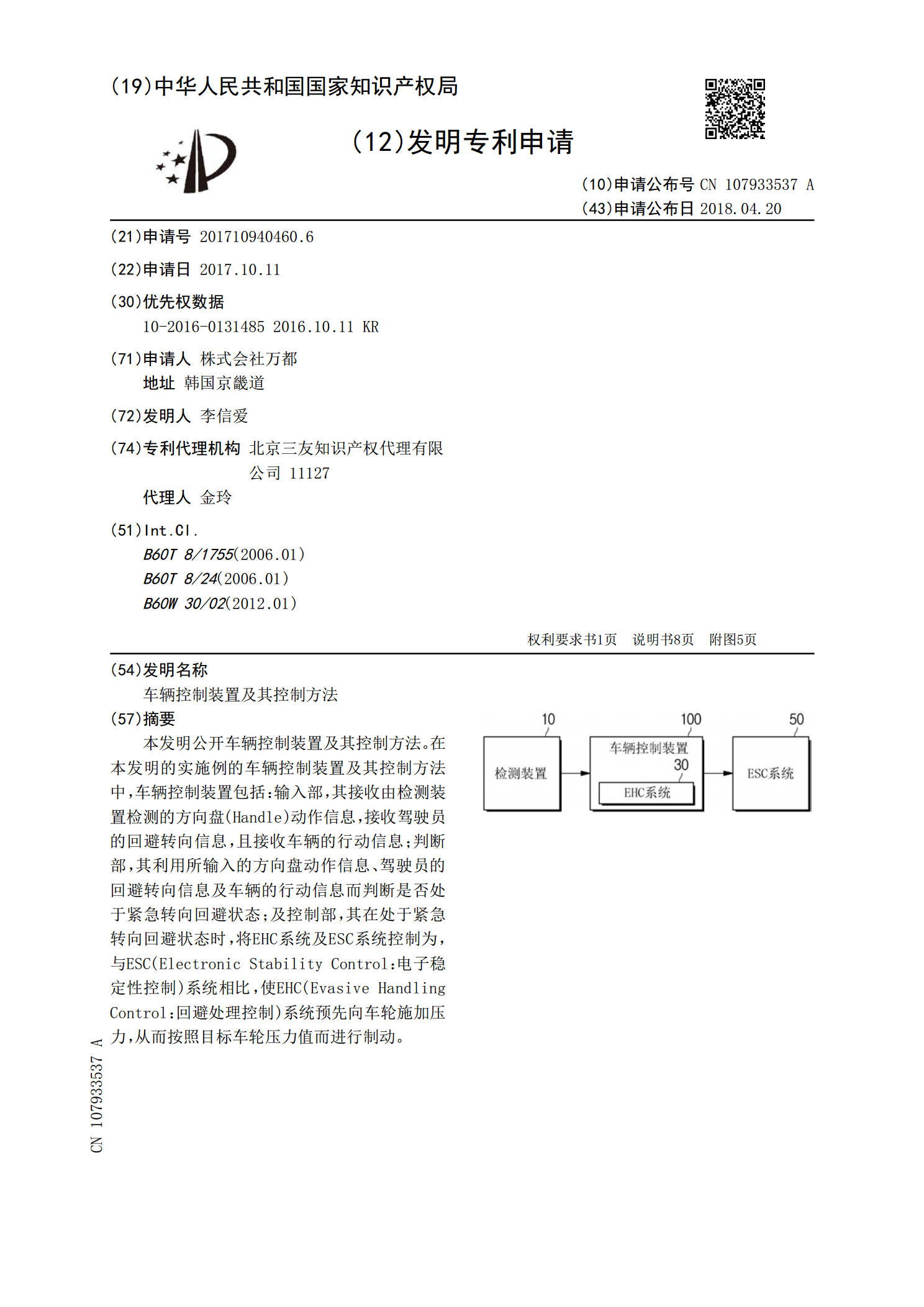
本发明公开车辆控制装置及其控制方法。在本发明的实施例的车辆控制装置及其控制方法中,车辆控制装置包括:输入部,其接收由检测装置检测的方向盘(Handle)动作信息,接收驾驶员的回避转向信息,且接收车辆的行动信息;判断部,其利用所输入的方向盘动作信息、驾驶员的回避转向信息及车辆的行动信息而判断是否处于紧急转向回避状态;及控制部,其在处于紧急转向回避状态时,将EHC系统及ESC系统控制为,与ESC(ElectronicStabilityControl:电子稳定性控制)系统相比,使EHC(EvasiveHa