
线性系统部分总复习(XX).ppt

天马****23


1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共72页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
线性系统部分总复习(XX).ppt
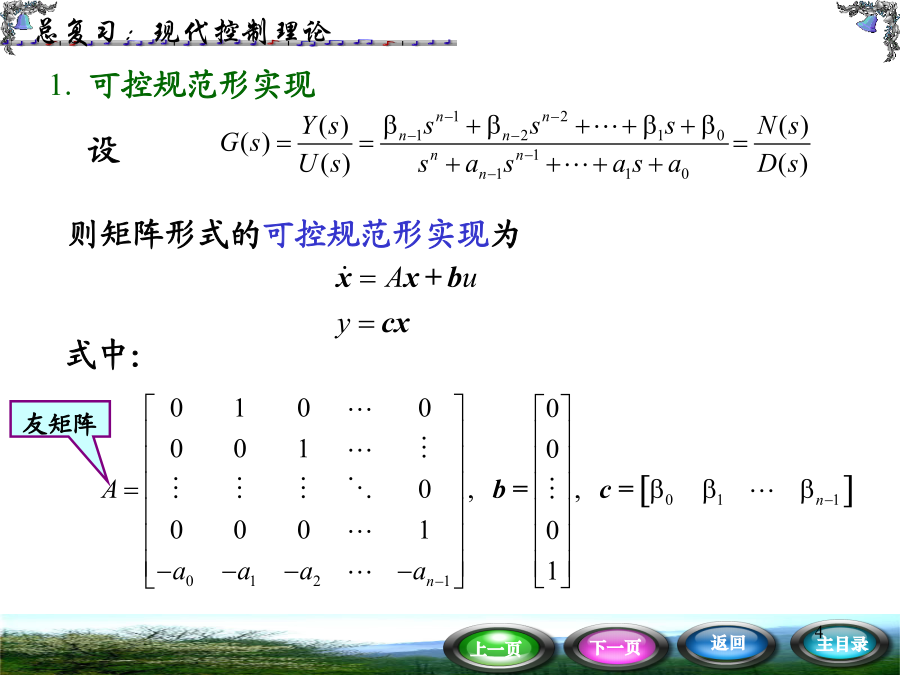
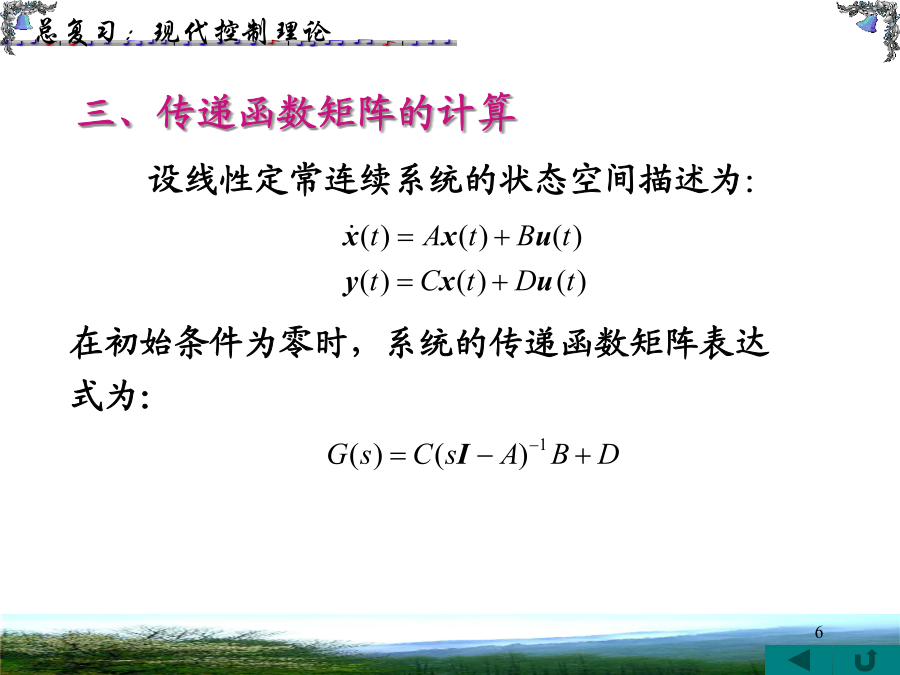
主要学习内容一.系统数学描述的两种基本类型二、线性定常连续系统状态空间表达式的建立1.可控规范形实现2)可观测规范形实现三、传递函数矩阵的计算1.非奇异线性变换的不变特性2.线性时不变系统等价状态空间描述对角规范形状态方程中的系统矩阵A具有对角形的形式。1)对角线规范形2)约当规范形3)特征值的代数重数和几何重数(b)几何重数说明:约当规范形的特点五、组合系统的状态空间描述两个线性时不变子系统S1和S2的状态空间描述分别为:二、子系统串联三、子系统反馈连接第3章线性系统的运动分析二.线性定常系统的状态转移
总复习(信号与线性系统).ppt
信号与线性系统内容回顾内容回顾1连续信号的时域描述及运算注意积分区间1.2信号的运算注意:例:已知f(1-2t)如图所示,求f(t)的波形。1)齐次性例2:已知某线性时不变系统:当激励e(t)=ε(t),初始状态x1(0-)=1,x2(0-)=2时,响应2、连续时间系统的时域分析2.1求解系统零输入响应的一般步骤:例1:已知某系统激励为零,初始值r(0)=2,r’(0)=1,r”(0)=0,描述系统的传输算子为a)求传输算子H(p);b)如果m≥n,用长除法将H(p)化为真分式;c)H(p)部分分式;d)
总复习(信号与线性系统必过知识点).ppt
信号与线性系统内容回顾内容回顾1连续信号的时域描述及运算注意积分区间1.2信号的运算注意:例:已知f(1-2t)如图所示,求f(t)的波形。1)齐次性例2:已知某线性时不变系统:当激励e(t)=ε(t),初始状态x1(0-)=1,x2(0-)=2时,响应2、连续时间系统的时域分析2.1求解系统零输入响应的一般步骤:例1:已知某系统激励为零,初始值r(0)=2,r’(0)=1,r”(0)=0,描述系统的传输算子为a)求传输算子H(p);b)如果m≥n,用长除法将H(p)化为真分式;c)H(p)部分分式;d)

总复习信号与线性系统必过知识点.ppt
信号与线性系统内容回顾内容回顾1连续信号的时域描述及运算注意积分区间1.2信号的运算注意:例:已知f(1-2t)如图所示,求f(t)的波形。1)齐次性例2:已知某线性时不变系统:当激励e(t)=ε(t),初始状态x1(0-)=1,x2(0-)=2时,响应2、连续时间系统的时域分析2.1求解系统零输入响应的一般步骤:例1:已知某系统激励为零,初始值r(0)=2,r’(0)=1,r”(0)=0,描述系统的传输算子为a)求传输算子H(p);b)如果m≥n,用长除法将H(p)化为真分式;c)H(p)部分分式;d)
宏观部分总复习.ppt
宏观部分总复习第十章简单国民收入决定模型3.生命周期理论:是F·莫迪利安尼等人提出的。消费不取决于现期收入,而取决于一生的收入和财产收入,持久收入理论:是由弗里德曼提出来的。居民消费取决于居民的持久收入。6、投资乘数:投资引起的收入增加量与投资增加量之间的比率。投资乘数产生的根源在于社会经济各部门之间的相互关联性。第十二章总需求与总供给模型2、影响总需求曲线移动的原因:在一个特定的价格总水平下,任何引起总支出变动的因素都将导致总需求曲线的移动。短期总供给曲线:bc线,从右上方向左下方倾斜,表示总供给和价格