
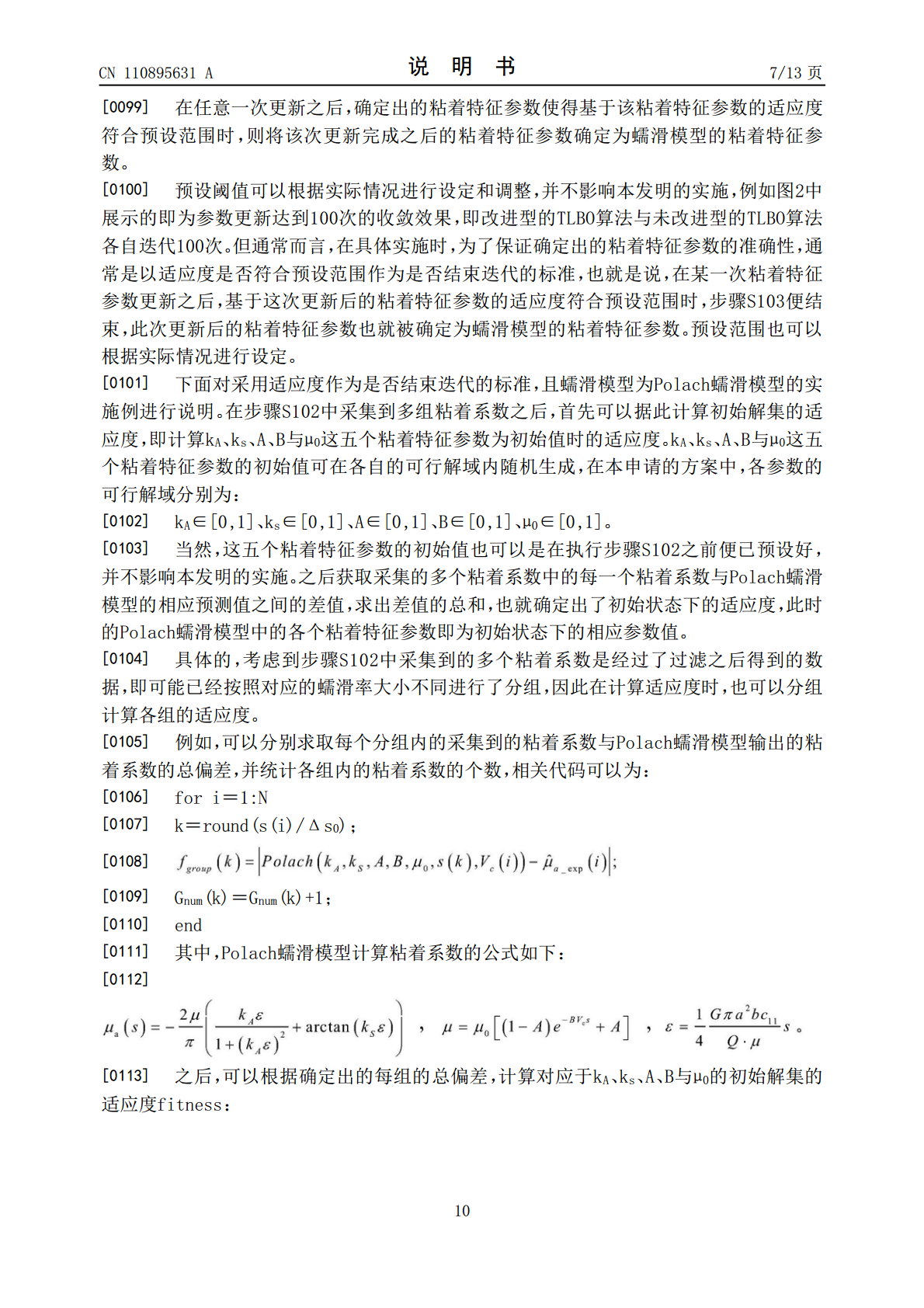
一种轮轨粘着特性的辨识方法以及系统.pdf

fa****楠吖


1/10

2/10

3/10
4/10

5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种轮轨粘着特性的辨识方法以及系统.pdf
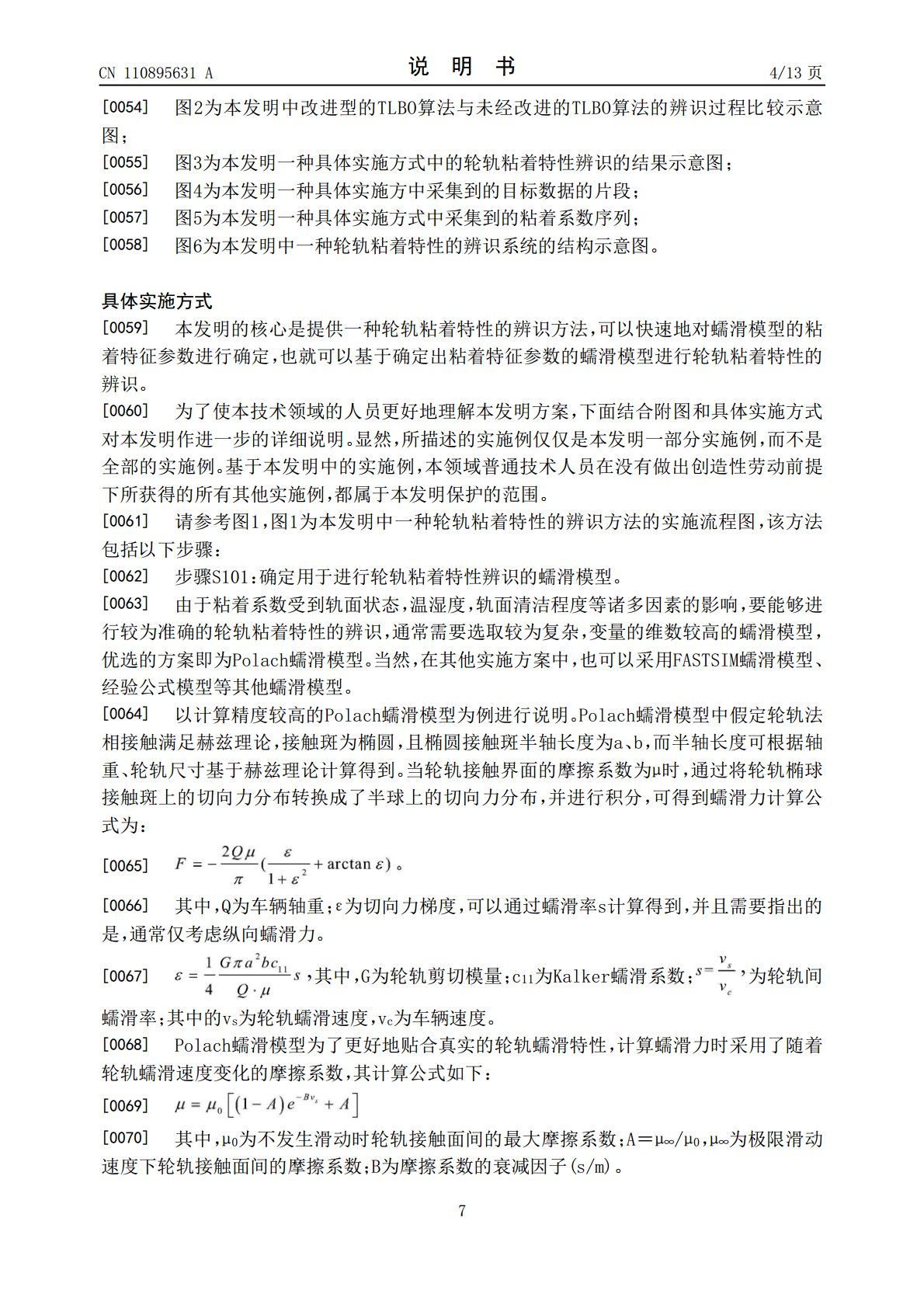
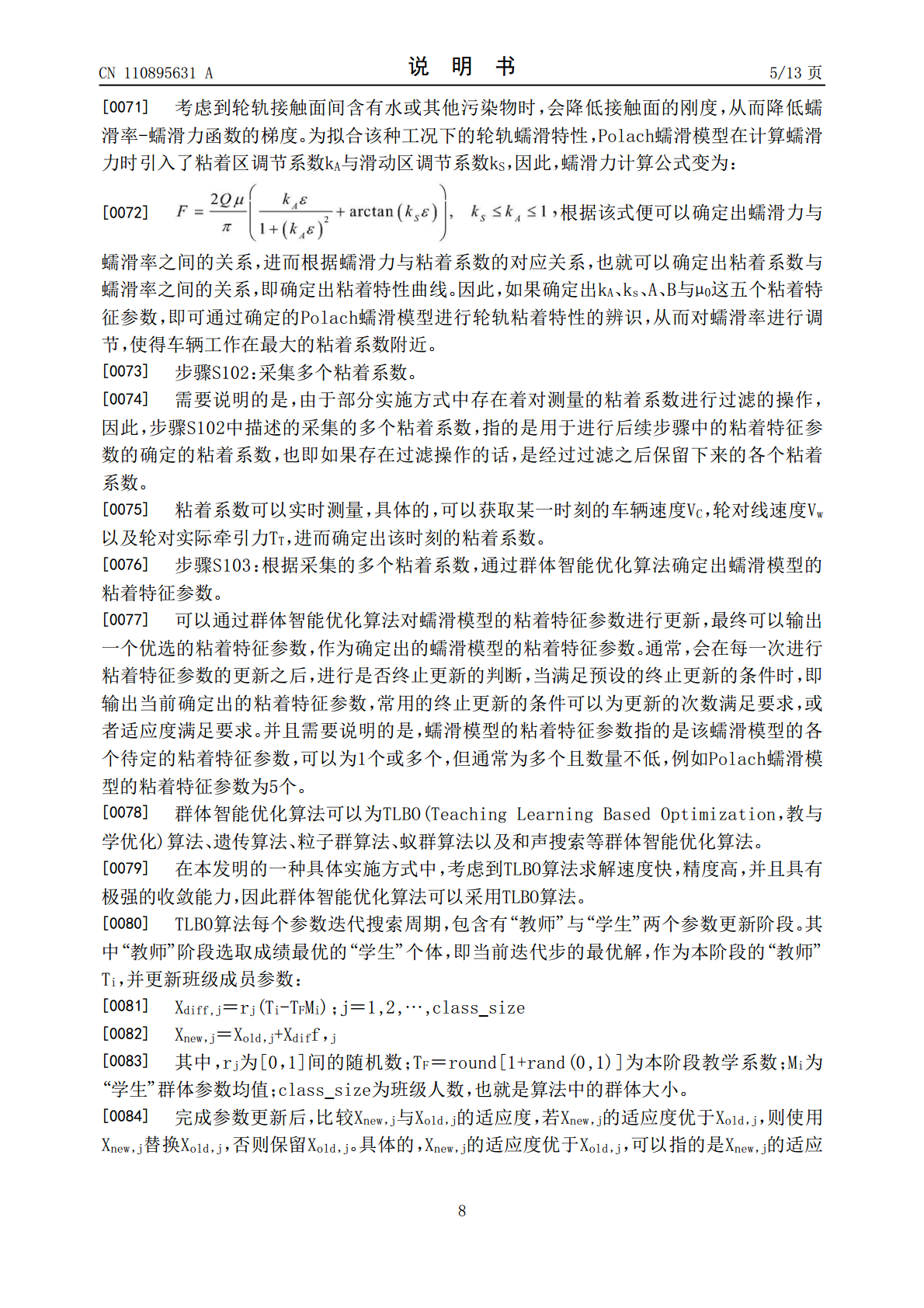
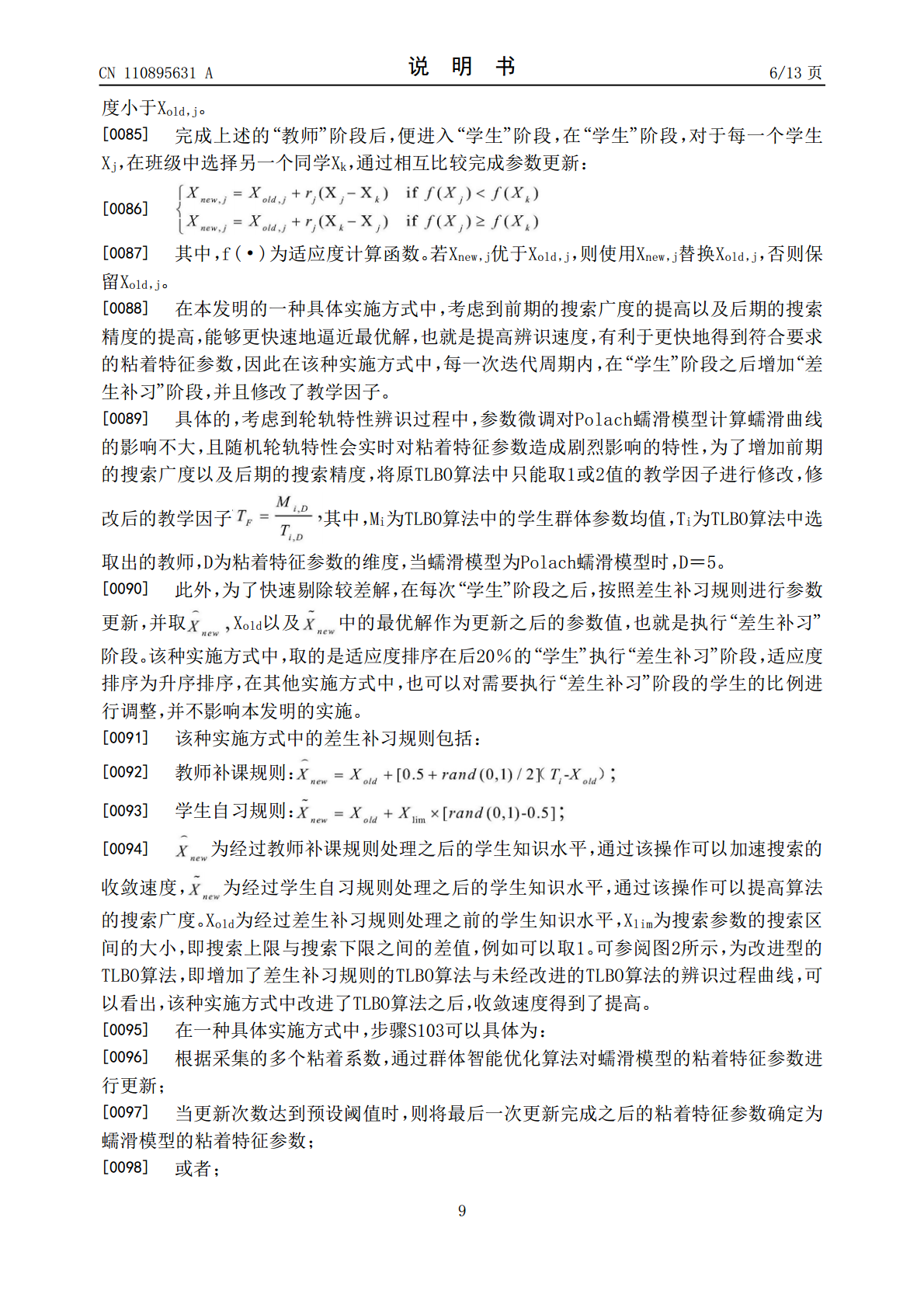
本发明公开了一种轮轨粘着特性的辨识方法,包括:确定用于进行轮轨粘着特性辨识的蠕滑模型;采集多个粘着系数;根据采集的多个粘着系数,通过群体智能优化算法确定出蠕滑模型的粘着特征参数;基于确定出粘着特征参数的蠕滑模型进行轮轨粘着特性的辨识。应用本申请的技术方案,可以快速地对蠕滑模型的粘着特征参数进行确定,也就可以基于确定出粘着特征参数的蠕滑模型进行轮轨粘着特性的辨识。本申请还公开了一种轮轨粘着特性的辨识系统,具有相应技术效果。
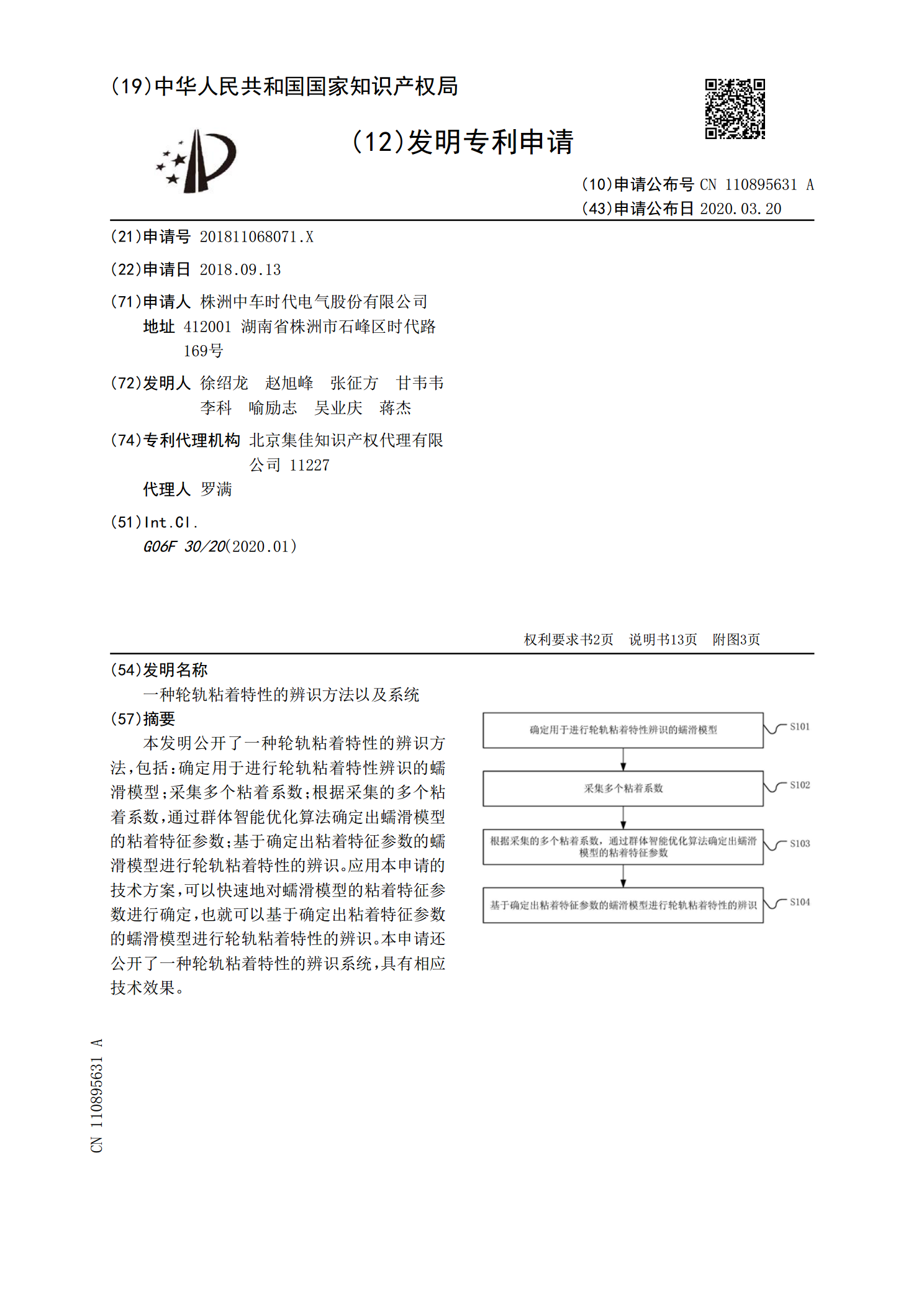
一种全息轮轨力辨识方法及系统.pdf
本发明提供了一种全息轮轨力辨识方法及系统,利用综合检测列车采集车辆的动态响应数据,将动态响应数据输入最优控制轮轨力载荷辨识模型,获得车辆的各轮对的轮轨垂向力,将一轮对的轮轨垂向力输入单轮对的滚动接触轮轨力载荷辨识模型,获得当前轮对对应的轮轨横向力。本发明基于最优控制轮轨力载荷辨识模型辨识各轮对的轮轨垂向力及轮轴横向力,在根据单轮对的滚动接触轮轨力载荷辨识模型辨识当前轮对对应的轮轨横向力,解决了轮轨横向力辨识机理模型遇到的方程数不适定问题,具有在测试数据不足的情况下,能够准确的辨识整车全部轮轨横向力及轮轨垂

油介质下轮轨粘着特性研究.docx
油介质下轮轨粘着特性研究摘要:为了探究油介质下的轮轨粘着特性,本文进行了系统的研究。通过对不同介质下轮轨之间的摩擦系数进行测试,可以得出:在润滑良好的油介质中,表面间碳基摩擦力系数会下降,在高负荷作用下不易出现粘着问题,这可能与油膜的润滑作用有关。本文也讨论了油介质在轮轨间的流态形态,其中包括了溅油、飞油等几种不同的现象,这些现象也在一定程度上影响了轮轨粘着的出现概率。因此,在轮轨使用过程中,应该考虑到油介质的润滑效果,同时注重机器的清洗和维护,以确保轮轨使用的安全可靠性。关键词:油介质;轮轨;粘着;润滑

浅论轮轨间粘着的改善方法.docx
浅论轮轨间粘着的改善方法浅论轮轨间粘着的改善方法引言:铁路交通作为一种高效、快速、环保的交通方式,受到了越来越多人的青睐。然而,在高速铁路的运行过程中,轮轨间的粘着问题成为了一个受关注的瓶颈。轮轨间粘着的存在不仅会增加能耗和阻力,甚至会引发严重的运行事故。因此,研究轮轨间粘着的改善方法是当前铁路领域亟待解决的问题之一。一、轮轨间粘着的成因与危害轮轨间粘着是指轮轨之间发生接触时产生粘附力的现象,主要成因有三个方面:1.摩擦力:轮轨间的摩擦力增大,会导致粘着现象的发生。摩擦力增大的原因可以是轮轨表面光滑度不足

水介质条件下轮轨粘着特性研究.docx
水介质条件下轮轨粘着特性研究摘要:随着交通运输技术的不断发展,铁路交通成为现代交通的重要组成部分。然而,在湿润环境下,轮轨粘着特性的变化会对铁路运输安全和运行效率产生不利影响。因此,研究轮轨粘着特性在水介质条件下的变化规律,对于提高铁路交通运输的安全性和可靠性具有重要意义。本文以国内外相关研究为基础,综述了轮轨粘着特性研究的现状和研究方法,分析了水介质条件对轮轨粘着特性的影响,探讨了提高轮轨粘着特性的方法,为铁路交通运输的发展提供了一定的理论基础和技术支撑。关键词:轮轨粘着特性,水介质条件,影响因素,提高