
一种机器人避障装置.pdf

Jo****34

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种飞行机器人避障装置及飞行机器人的避障方法.pdf
本发明公开了一种飞行机器人避障装置及飞行机器人的避障方法,包括飞行本体和设置在其下端的支腿,所述支腿下端设有用于支撑整个装置的支撑板,所述飞行本体由两个同轴且平行设置的圆形块以及将两个圆形块连接的连接柱构成,所述连接柱外侧转动设有转动圈,所述转动圈与连接柱之间通过固定轴承转动连接,所述转动圈外侧阵列分布有数量不少于三个的飞行臂,每个飞行臂端部都设有一个电机,所述电机的输出端设有叶片,所述飞行臂端部设有用于调节电机安装角度的角度调节座,本发明针对现有装置的弊端进行设计,在飞行本体四周形成一个封闭的检测区,无
一种机器人避障装置.pdf
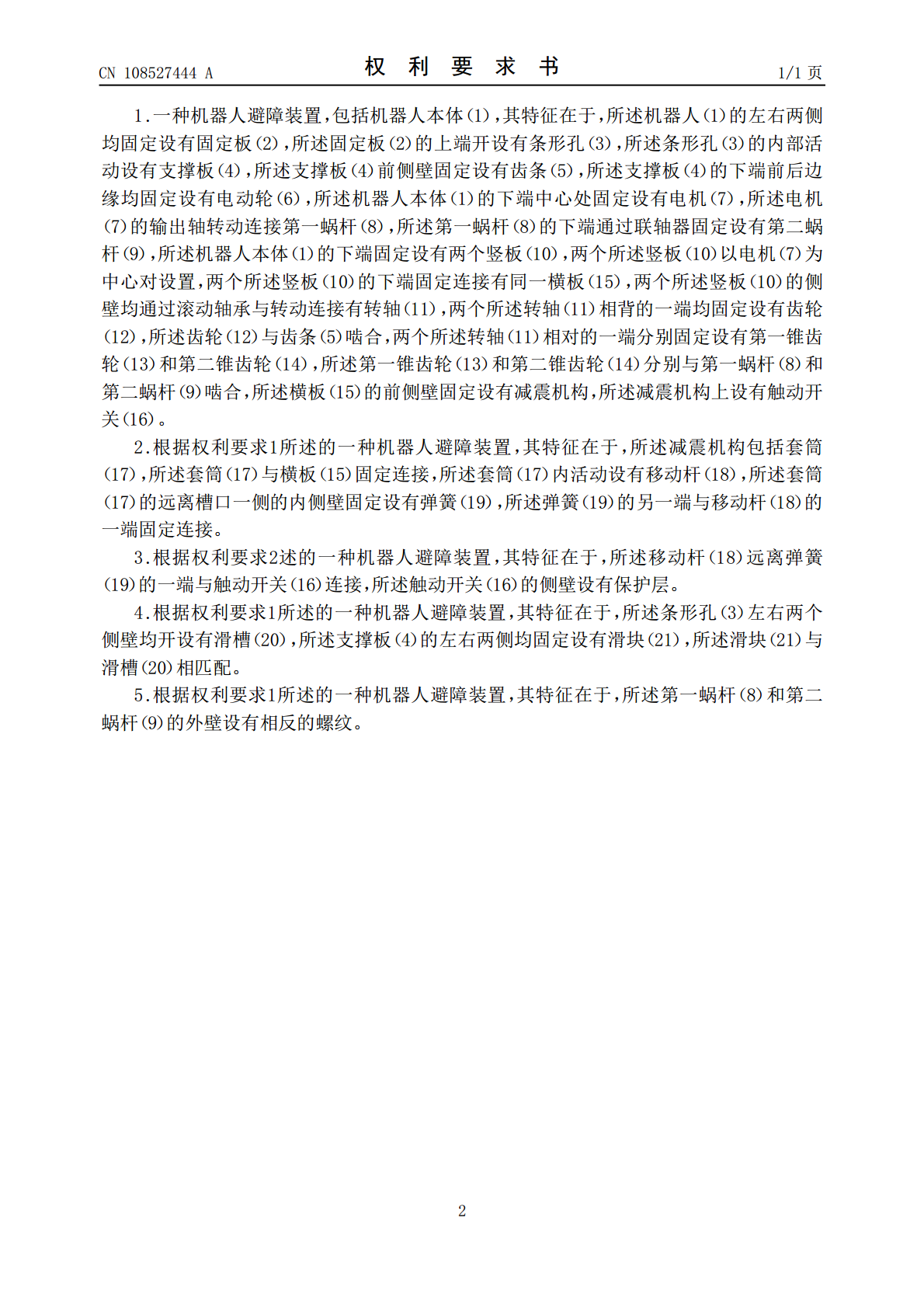
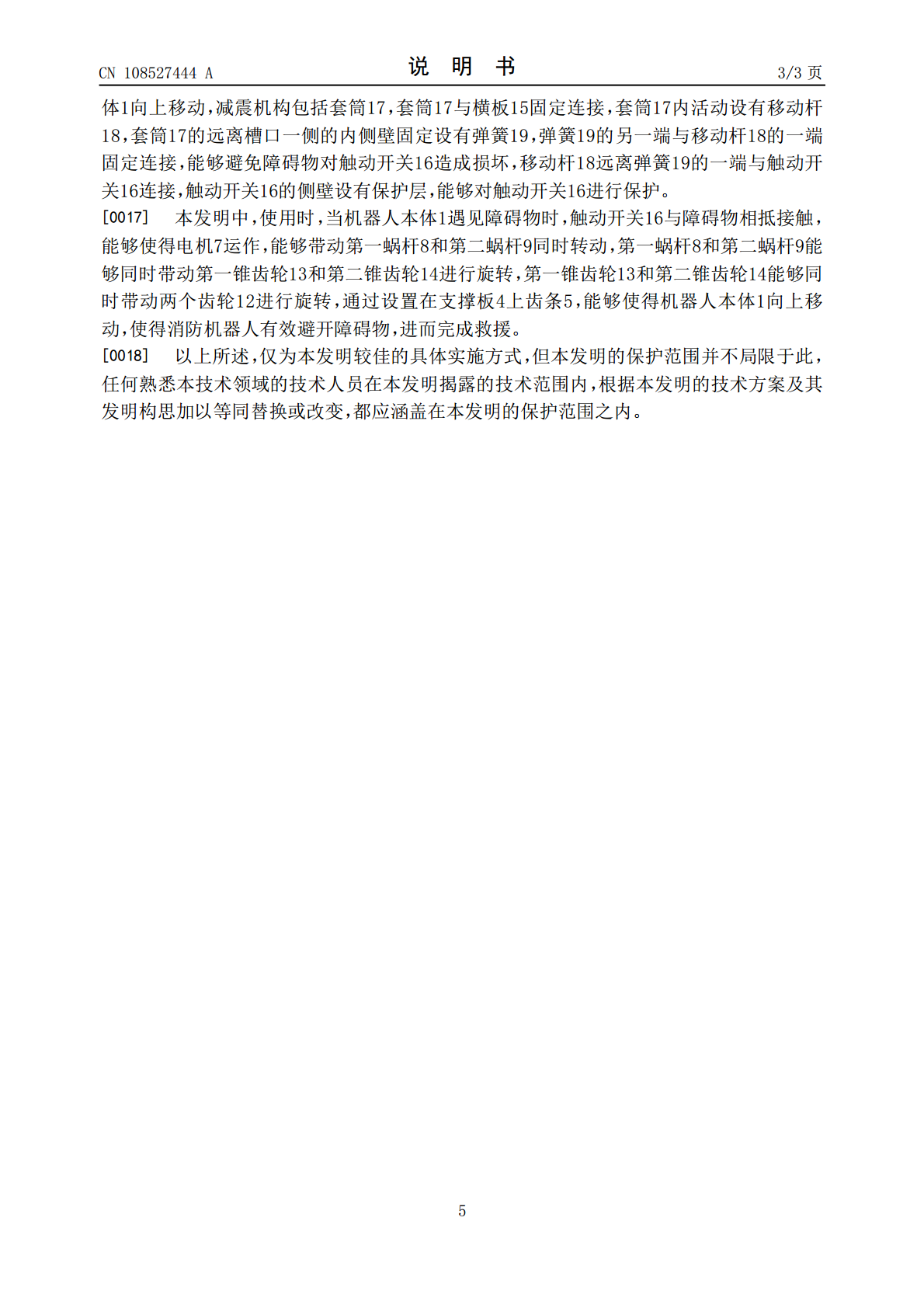
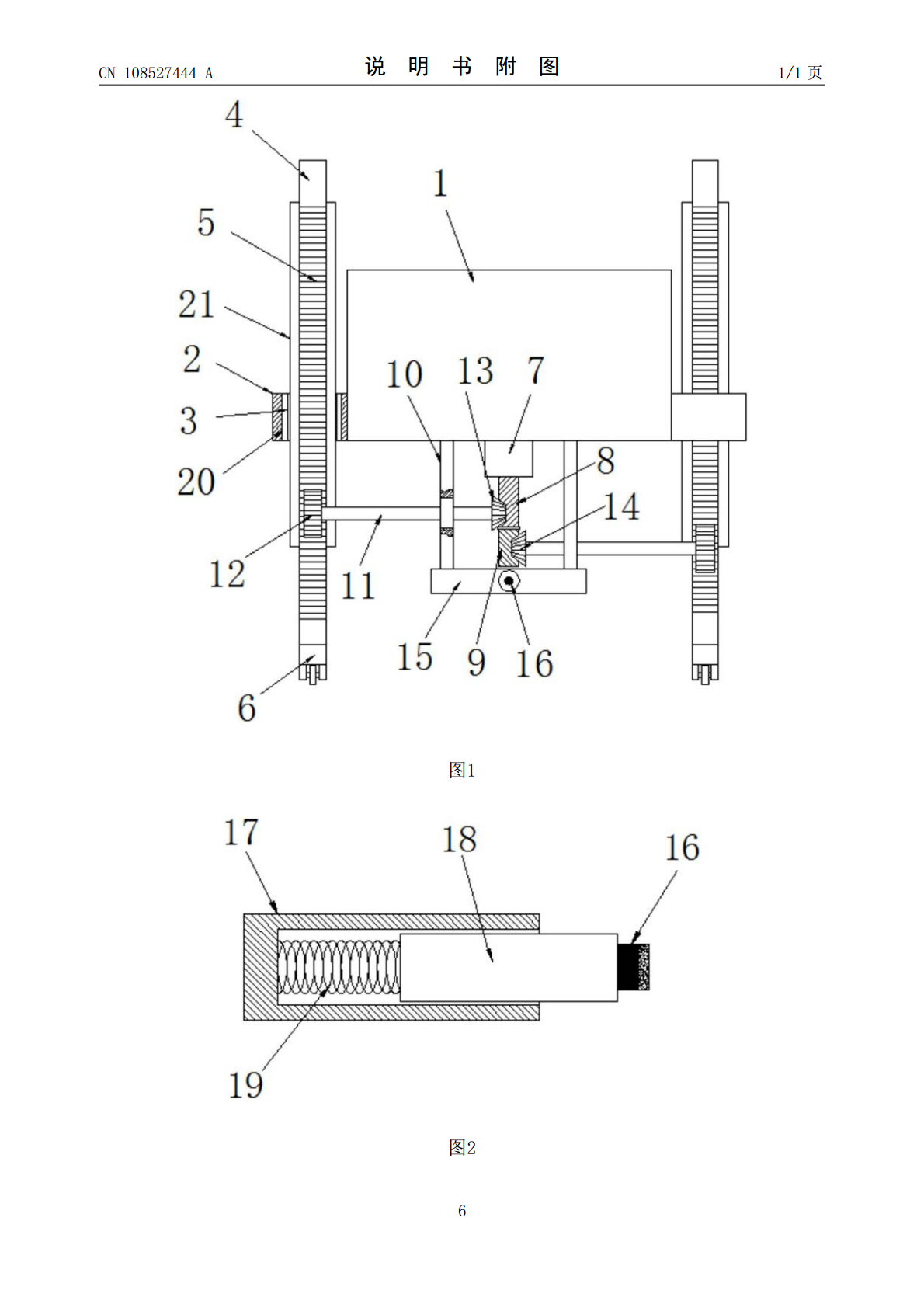
本发明公开了一种机器人避障装置,包括机器人本体,机器人的左右两侧均固定设有固定板,固定板的上端开设有条形孔,条形孔的内部活动设有支撑板,支撑板前侧壁固定设有齿条,支撑板的下端前后边缘均固定设有电动轮,机器人本体的下端中心处固定设有电机,电机的输出轴转动连接第一蜗杆,第一蜗杆的下端通过联轴器固定设有第二蜗杆,机器人本体的下端固定设有两个竖板,两个竖板以电机为中心对设置,两个竖板的下端固定连接有同一横板,两个竖板的侧壁均通过滚动轴承与转动连接有转轴,两个转轴相背的一端均固定设有齿轮,齿轮与齿条啮合。本发明操作
一种机器人行动避障装置.pdf
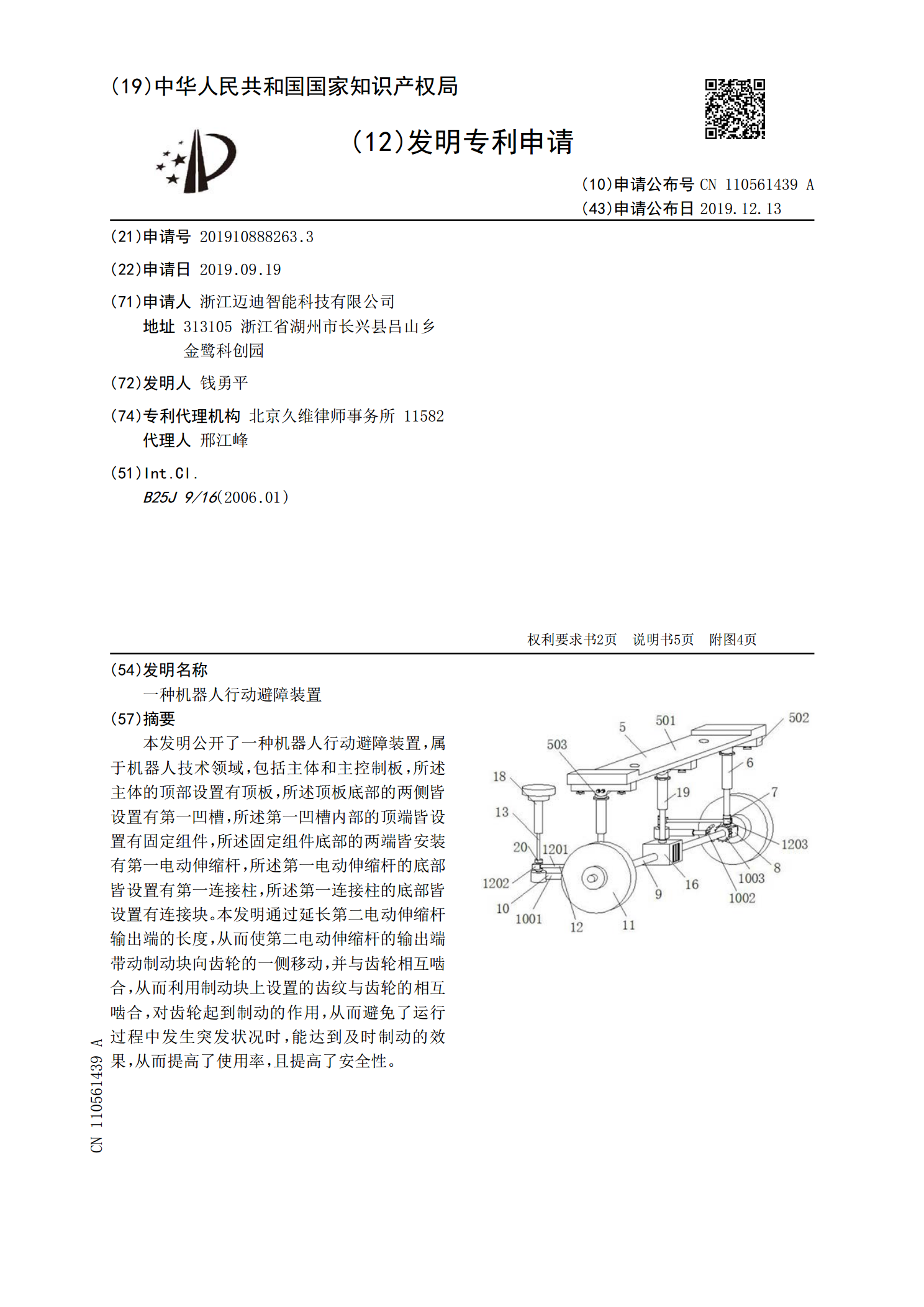
本发明公开了一种机器人行动避障装置,属于机器人技术领域,包括主体和主控制板,所述主体的顶部设置有顶板,所述顶板底部的两侧皆设置有第一凹槽,所述第一凹槽内部的顶端皆设置有固定组件,所述固定组件底部的两端皆安装有第一电动伸缩杆,所述第一电动伸缩杆的底部皆设置有第一连接柱,所述第一连接柱的底部皆设置有连接块。本发明通过延长第二电动伸缩杆输出端的长度,从而使第二电动伸缩杆的输出端带动制动块向齿轮的一侧移动,并与齿轮相互啮合,从而利用制动块上设置的齿纹与齿轮的相互啮合,对齿轮起到制动的作用,从而避免了运行过程中发生
一种具备避障装置的机器人.pdf
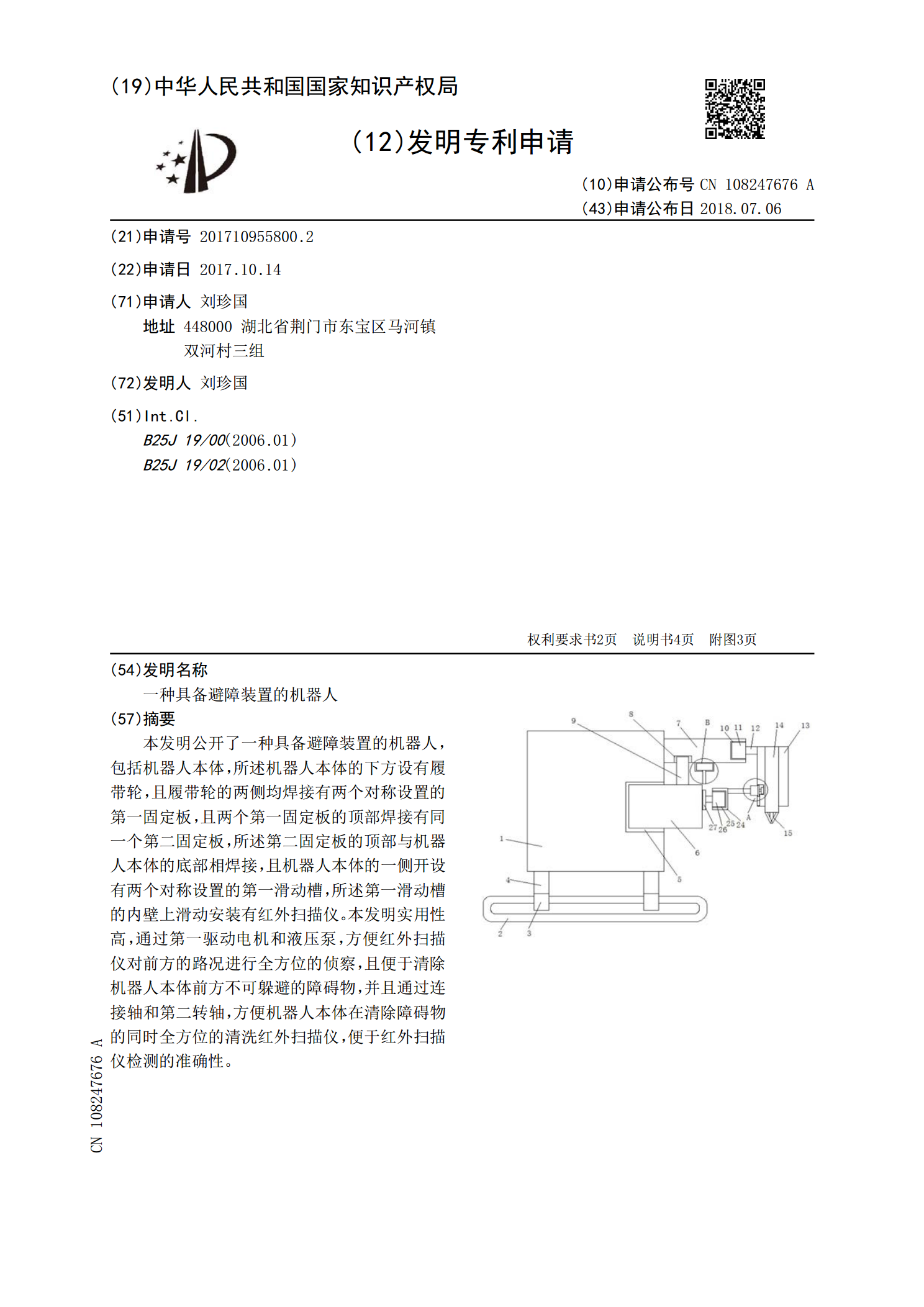
本发明公开了一种具备避障装置的机器人,包括机器人本体,所述机器人本体的下方设有履带轮,且履带轮的两侧均焊接有两个对称设置的第一固定板,且两个第一固定板的顶部焊接有同一个第二固定板,所述第二固定板的顶部与机器人本体的底部相焊接,且机器人本体的一侧开设有两个对称设置的第一滑动槽,所述第一滑动槽的内壁上滑动安装有红外扫描仪。本发明实用性高,通过第一驱动电机和液压泵,方便红外扫描仪对前方的路况进行全方位的侦察,且便于清除机器人本体前方不可躲避的障碍物,并且通过连接轴和第二转轴,方便机器人本体在清除障碍物的同时全方
一种机器人避障方法、装置和机器人.pdf
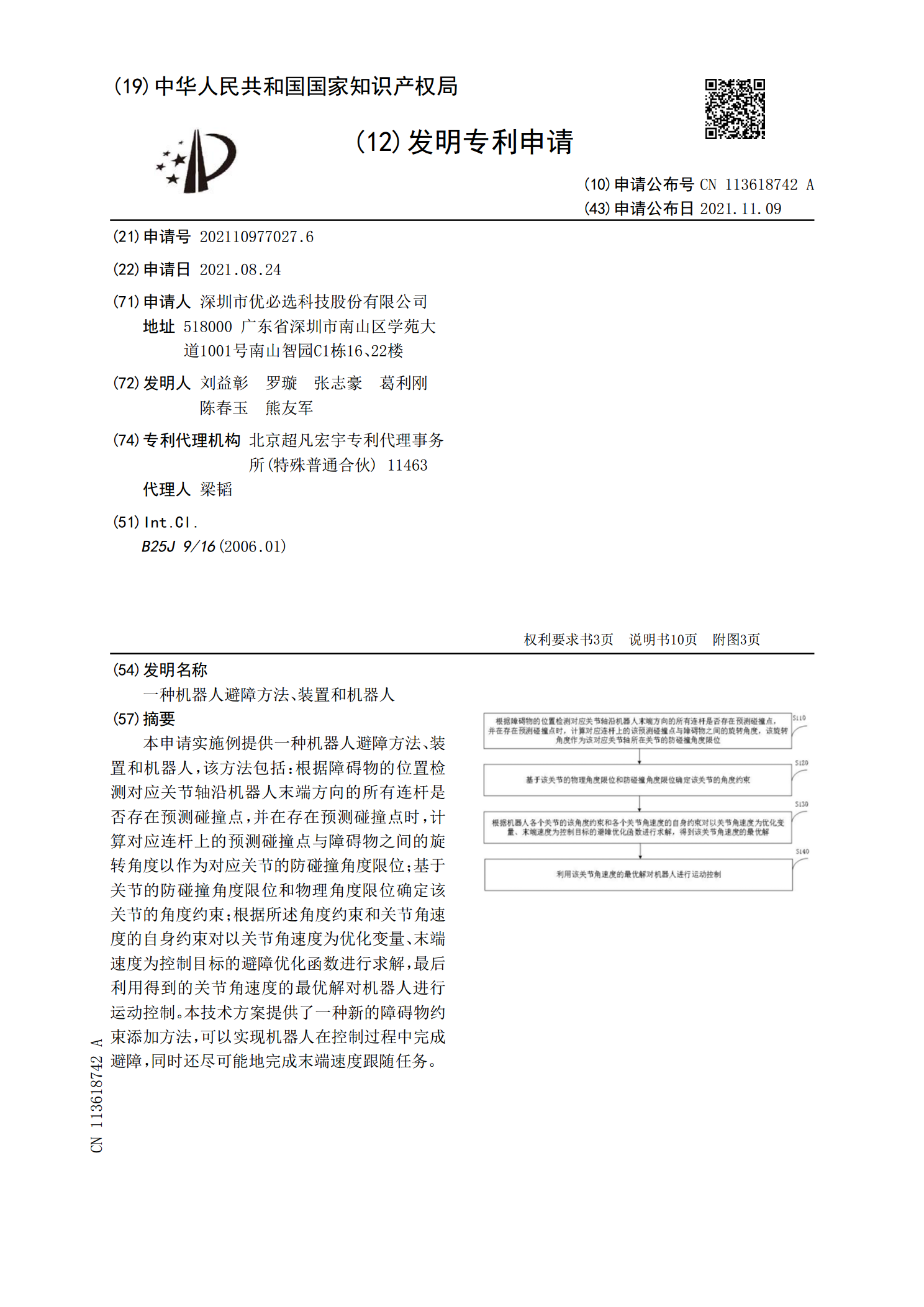
本申请实施例提供一种机器人避障方法、装置和机器人,该方法包括:根据障碍物的位置检测对应关节轴沿机器人末端方向的所有连杆是否存在预测碰撞点,并在存在预测碰撞点时,计算对应连杆上的预测碰撞点与障碍物之间的旋转角度以作为对应关节的防碰撞角度限位;基于关节的防碰撞角度限位和物理角度限位确定该关节的角度约束;根据所述角度约束和关节角速度的自身约束对以关节角速度为优化变量、末端速度为控制目标的避障优化函数进行求解,最后利用得到的关节角速度的最优解对机器人进行运动控制。本技术方案提供了一种新的障碍物约束添加方法,可以实