
一种轮圈自动校正系统和方法.pdf

秋花****姐姐


1/10

2/10
3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种轮圈自动校正系统和方法.pdf
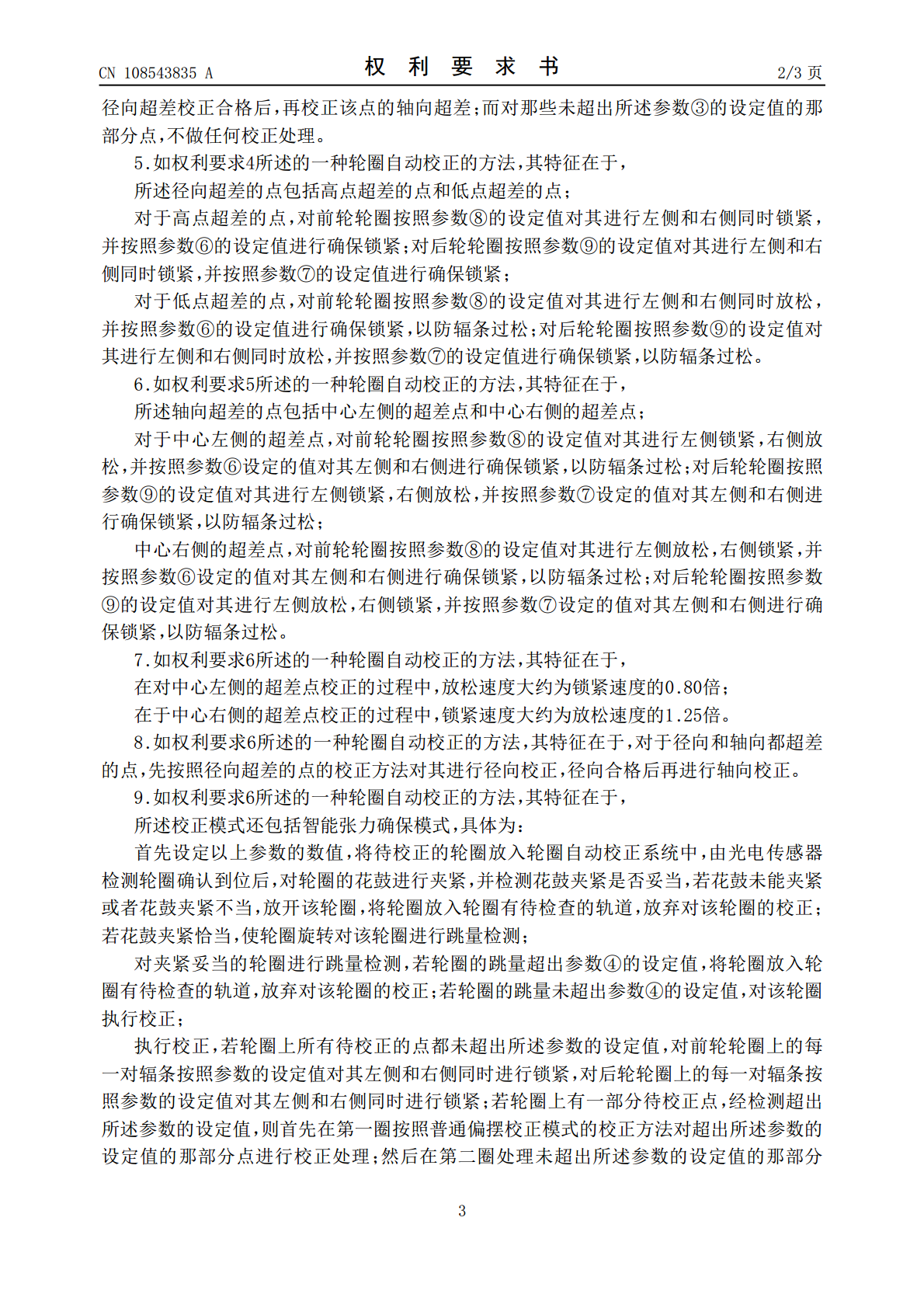
本发明提供了一种全自动的轮圈自动校正系统和方法,本发明利用由PLC控制器,激光传感器,光电传感器,三套伺服系统,四个编码器,一对机械手,阀岛和一对气缸组成的系统,通过轮圈固定,跳量检测,执行校正等步骤,进行轮圈校正,既可以保证轮圈的精度,又可以保证中心偏差,其中轴向跳量和径向跳量均可以控制在0.5mm以下,中心偏差可以控制在0.5mm以下,更能确保轮圈的张力均匀,不松条。而且可以将所有辐条张力较小的轮圈校正以后,使其在精度,中心值和张力均匀度等方面都合格。在智能校正张力确保模式下,本发明生产效率在现有技术

轮圈检测校正装置及其校正方法.pdf
本发明公开了一种轮圈检测校正装置,它包括:入料装置、定位装置、驱动装置;轴向检测装置和第一旋转编码器,轴向检测装置用于检测轮圈沿轴向的跳动值,第一旋转编码器将检测到的轴向跳动值转换为数据信号;径向检测装置和第二旋转编码器,径向检测装置用于检测轮圈沿径向的跳动值,第二旋转编码器将检测到的径向跳动值转换为数据信号;角度检测装置;位于轮圈上部的第一对铜头锁紧装置;位于轮圈下部的第二对铜头锁紧装置;控制装置,控制装置在接收到第一旋转编码器和第二旋转编码器的数据信号后进行数据处理,驱动装置根据处理完成的数据在角度检

一种转向系统自动校正方法.pdf
本发明提供了一种转向系统自动校正方法,包括:轮速计采集设定时间间隔内的第一和第二后轮脉冲信号,处理得到第一和第二后轮的实际转动距离;结合车辆的轮距和轴距参数,计算得到车辆当前的实际车轮偏转角;处理器确定车辆当前的实际车轮偏转角与线控系统的角传动比的乘积是否大于车辆的最小车轮偏转角度;如果大于,自动驾驶控制器根据车辆的最小车轮偏转角度得到线控系统的控制转向角度修正参数,用于车辆转向系统进行自动校正;确定车辆当前的实际车轮偏转角与线控系统的角传动比的乘积是否大于目标转向角度;如果大于,循环执行之前的步骤,直至

一种盲文图像自动倾斜校正方法及系统.pdf
本发明涉及一种盲文图像自动倾斜校正方法及系统,包括:利用采集设备获取纸版盲文的数字化图像;对该数字化图像的盲文进行盲文点检测,获得待校正图像;获取该待校正图像中盲文点的位置信息;根据该位置信息将该待校正图像中的盲文点和背景二值化,获得二值化图像,将背景的像素点赋值为0;将该二值化图像以预设角度为间隔进行第一轮多次旋转,将每次旋转后水平投影行像素值和为0的行数和竖直投影列像素和为0的列数相加,作为行列数,并将该行列数最大时对应的旋转角度作为校正角度,通过该校正角度对待校正图像进行倾斜校正。
校正系统、校正装置和校正方法.pdf
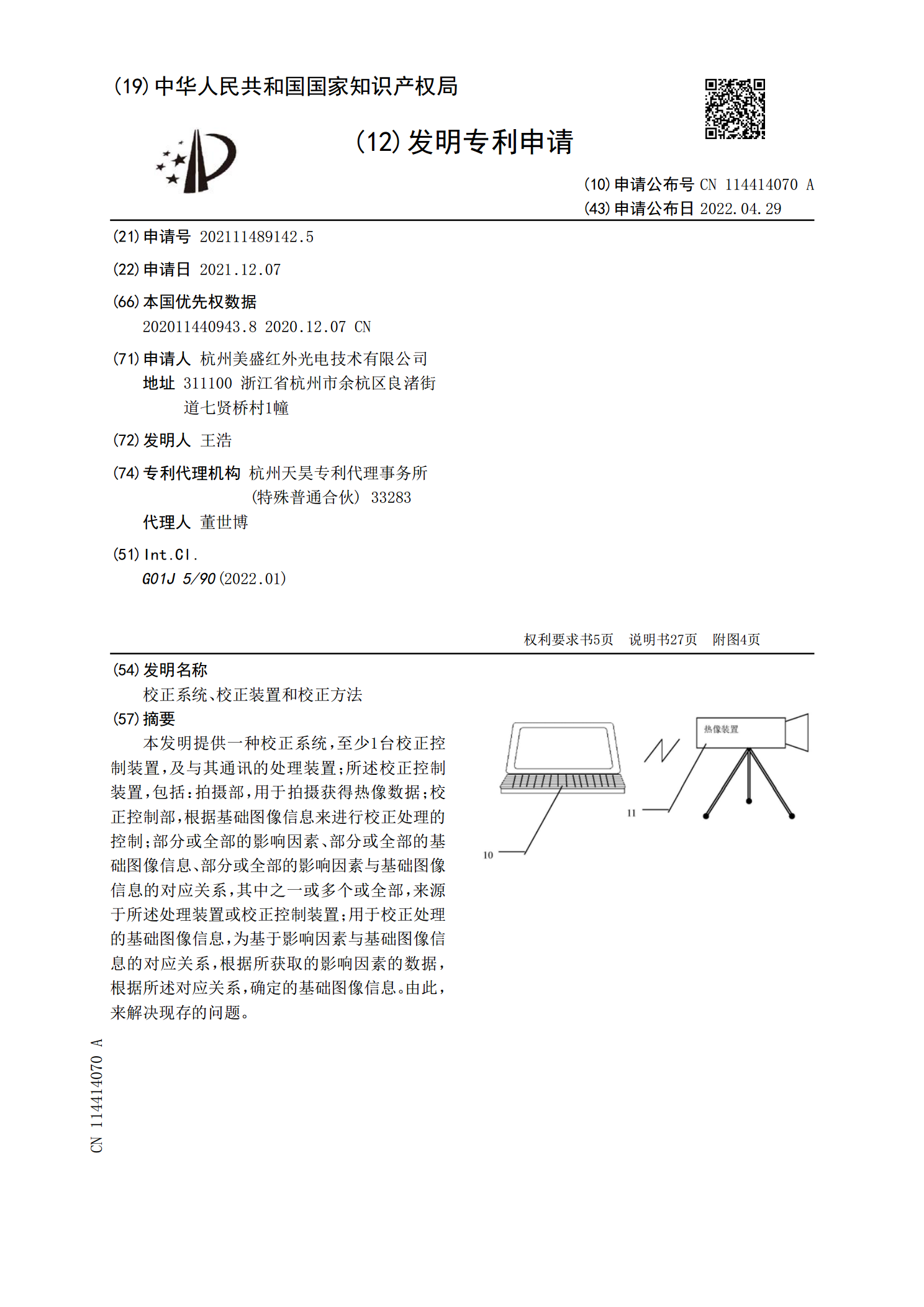
本发明提供一种校正系统,至少1台校正控制装置,及与其通讯的处理装置;所述校正控制装置,包括:拍摄部,用于拍摄获得热像数据;校正控制部,根据基础图像信息来进行校正处理的控制;部分或全部的影响因素、部分或全部的基础图像信息、部分或全部的影响因素与基础图像信息的对应关系,其中之一或多个或全部,来源于所述处理装置或校正控制装置;用于校正处理的基础图像信息,为基于影响因素与基础图像信息的对应关系,根据所获取的影响因素的数据,根据所述对应关系,确定的基础图像信息。由此,来解决现存的问题。