
一种轮式管道机器人转向装置.pdf

Ch****91


1/7
2/7

3/7

4/7
5/7
6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种轮式管道机器人转向装置.pdf
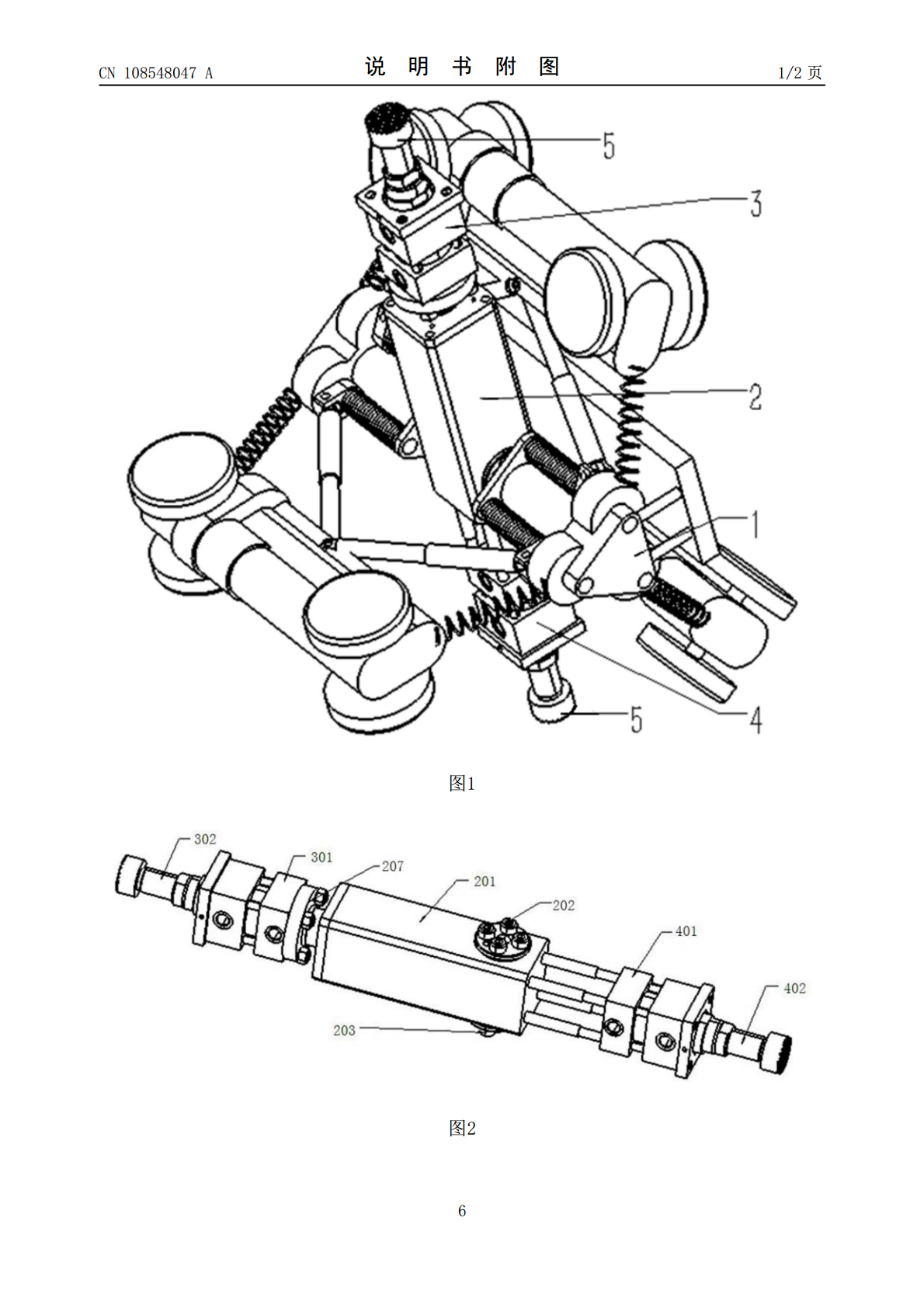
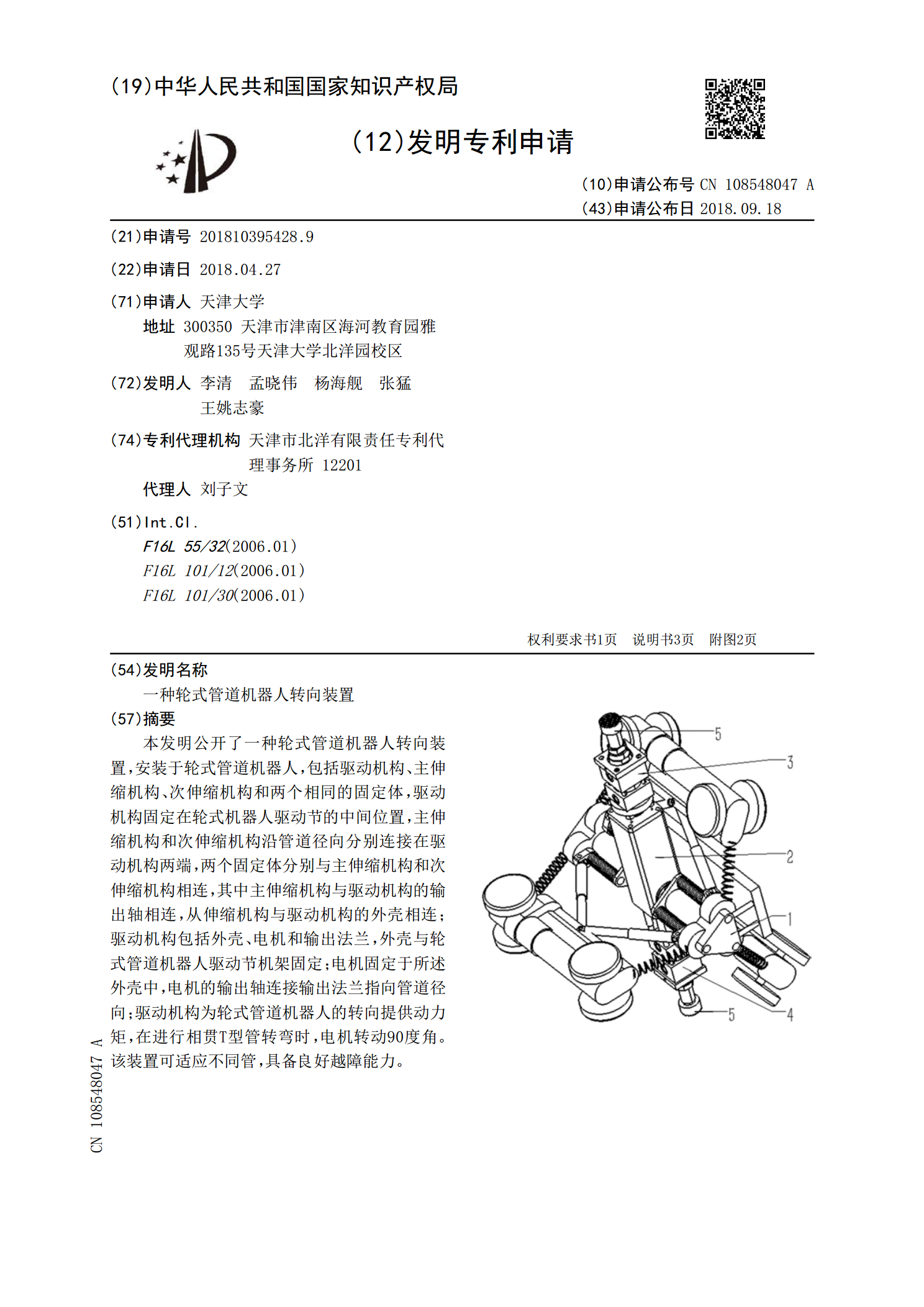
本发明公开了一种轮式管道机器人转向装置,安装于轮式管道机器人,包括驱动机构、主伸缩机构、次伸缩机构和两个相同的固定体,驱动机构固定在轮式机器人驱动节的中间位置,主伸缩机构和次伸缩机构沿管道径向分别连接在驱动机构两端,两个固定体分别与主伸缩机构和次伸缩机构相连,其中主伸缩机构与驱动机构的输出轴相连,从伸缩机构与驱动机构的外壳相连;驱动机构包括外壳、电机和输出法兰,外壳与轮式管道机器人驱动节机架固定;电机固定于所述外壳中,电机的输出轴连接输出法兰指向管道径向;驱动机构为轮式管道机器人的转向提供动力矩,在进行相
一种自适应自主转向的轮式管道机器人.pdf
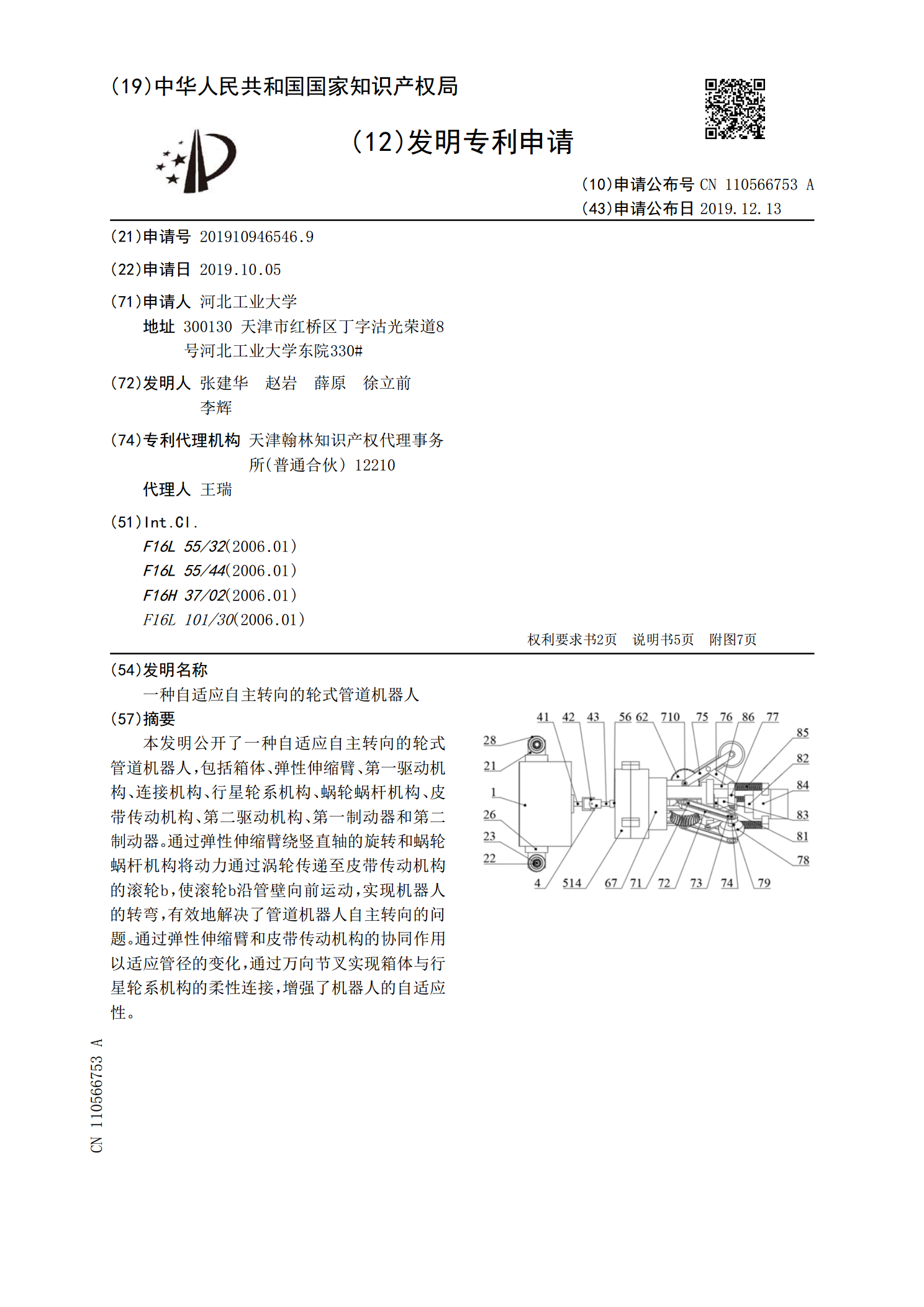
本发明公开了一种自适应自主转向的轮式管道机器人,包括箱体、弹性伸缩臂、第一驱动机构、连接机构、行星轮系机构、蜗轮蜗杆机构、皮带传动机构、第二驱动机构、第一制动器和第二制动器。通过弹性伸缩臂绕竖直轴的旋转和蜗轮蜗杆机构将动力通过涡轮传递至皮带传动机构的滚轮b,使滚轮b沿管壁向前运动,实现机器人的转弯,有效地解决了管道机器人自主转向的问题。通过弹性伸缩臂和皮带传动机构的协同作用以适应管径的变化,通过万向节叉实现箱体与行星轮系机构的柔性连接,增强了机器人的自适应性。
一种轮式管道机器人牵引装置.pdf
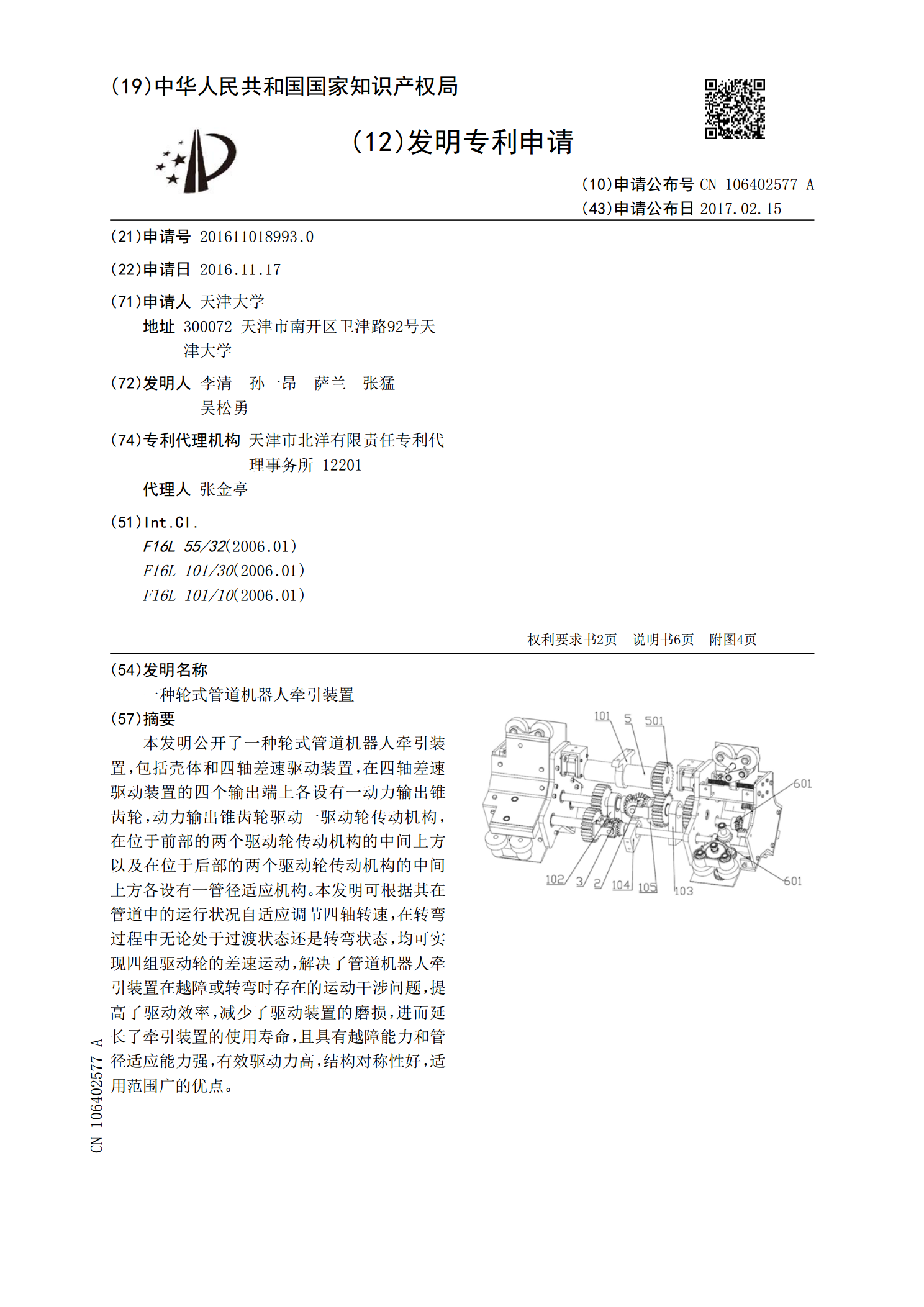
本发明公开了一种轮式管道机器人牵引装置,包括壳体和四轴差速驱动装置,在四轴差速驱动装置的四个输出端上各设有一动力输出锥齿轮,动力输出锥齿轮驱动一驱动轮传动机构,在位于前部的两个驱动轮传动机构的中间上方以及在位于后部的两个驱动轮传动机构的中间上方各设有一管径适应机构。本发明可根据其在管道中的运行状况自适应调节四轴转速,在转弯过程中无论处于过渡状态还是转弯状态,均可实现四组驱动轮的差速运动,解决了管道机器人牵引装置在越障或转弯时存在的运动干涉问题,提高了驱动效率,减少了驱动装置的磨损,进而延长了牵引装置的使用
一种支撑轮式管道机器人驱动装置.pdf
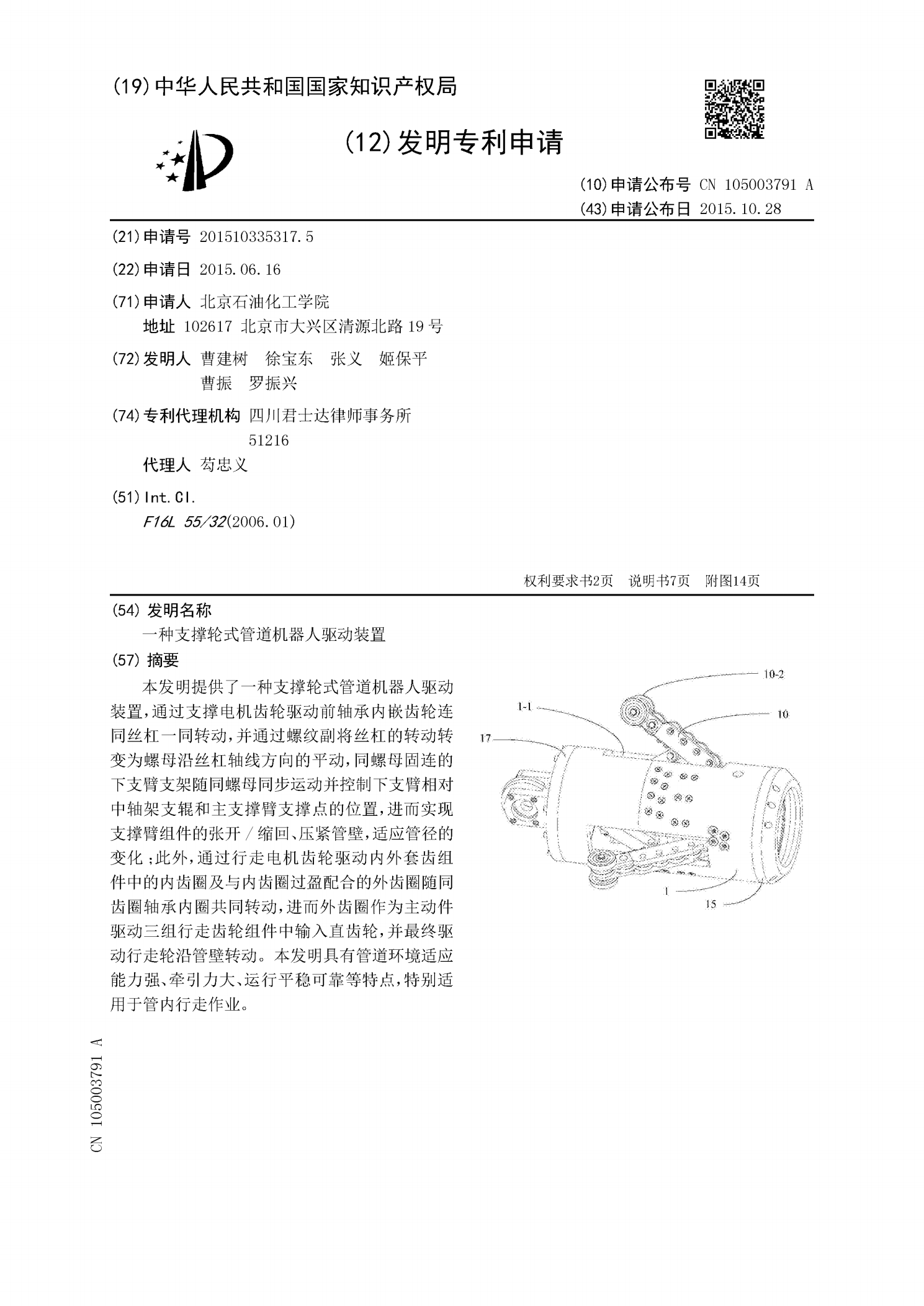
本发明提供了一种支撑轮式管道机器人驱动装置,通过支撑电机齿轮驱动前轴承内嵌齿轮连同丝杠一同转动,并通过螺纹副将丝杠的转动转变为螺母沿丝杠轴线方向的平动,同螺母固连的下支臂支架随同螺母同步运动并控制下支臂相对中轴架支辊和主支撑臂支撑点的位置,进而实现支撑臂组件的张开/缩回、压紧管壁,适应管径的变化;此外,通过行走电机齿轮驱动内外套齿组件中的内齿圈及与内齿圈过盈配合的外齿圈随同齿圈轴承内圈共同转动,进而外齿圈作为主动件驱动三组行走齿轮组件中输入直齿轮,并最终驱动行走轮沿管壁转动。本发明具有管道环境适应能力强、
一种轮式磁吸附爬壁机器人的转向装置.pdf
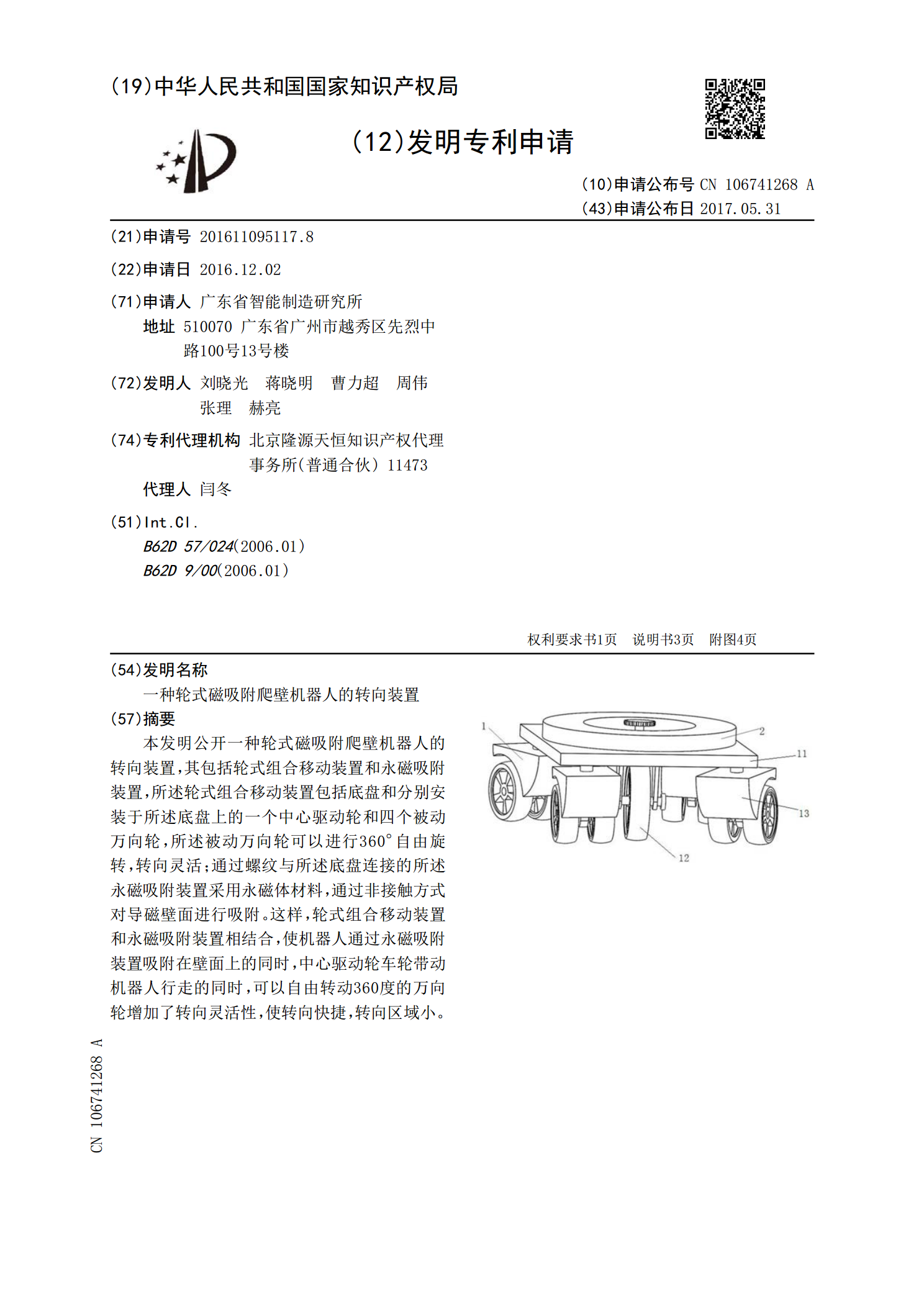
本发明公开一种轮式磁吸附爬壁机器人的转向装置,其包括轮式组合移动装置和永磁吸附装置,所述轮式组合移动装置包括底盘和分别安装于所述底盘上的一个中心驱动轮和四个被动万向轮,所述被动万向轮可以进行360°自由旋转,转向灵活;通过螺纹与所述底盘连接的所述永磁吸附装置采用永磁体材料,通过非接触方式对导磁壁面进行吸附。这样,轮式组合移动装置和永磁吸附装置相结合,使机器人通过永磁吸附装置吸附在壁面上的同时,中心驱动轮车轮带动机器人行走的同时,可以自由转动360度的万向轮增加了转向灵活性,使转向快捷,转向区域小。