
一种轮式磁吸附爬壁机器人的转向装置.pdf

Jo****63

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种轮式磁吸附爬壁机器人的转向装置.pdf
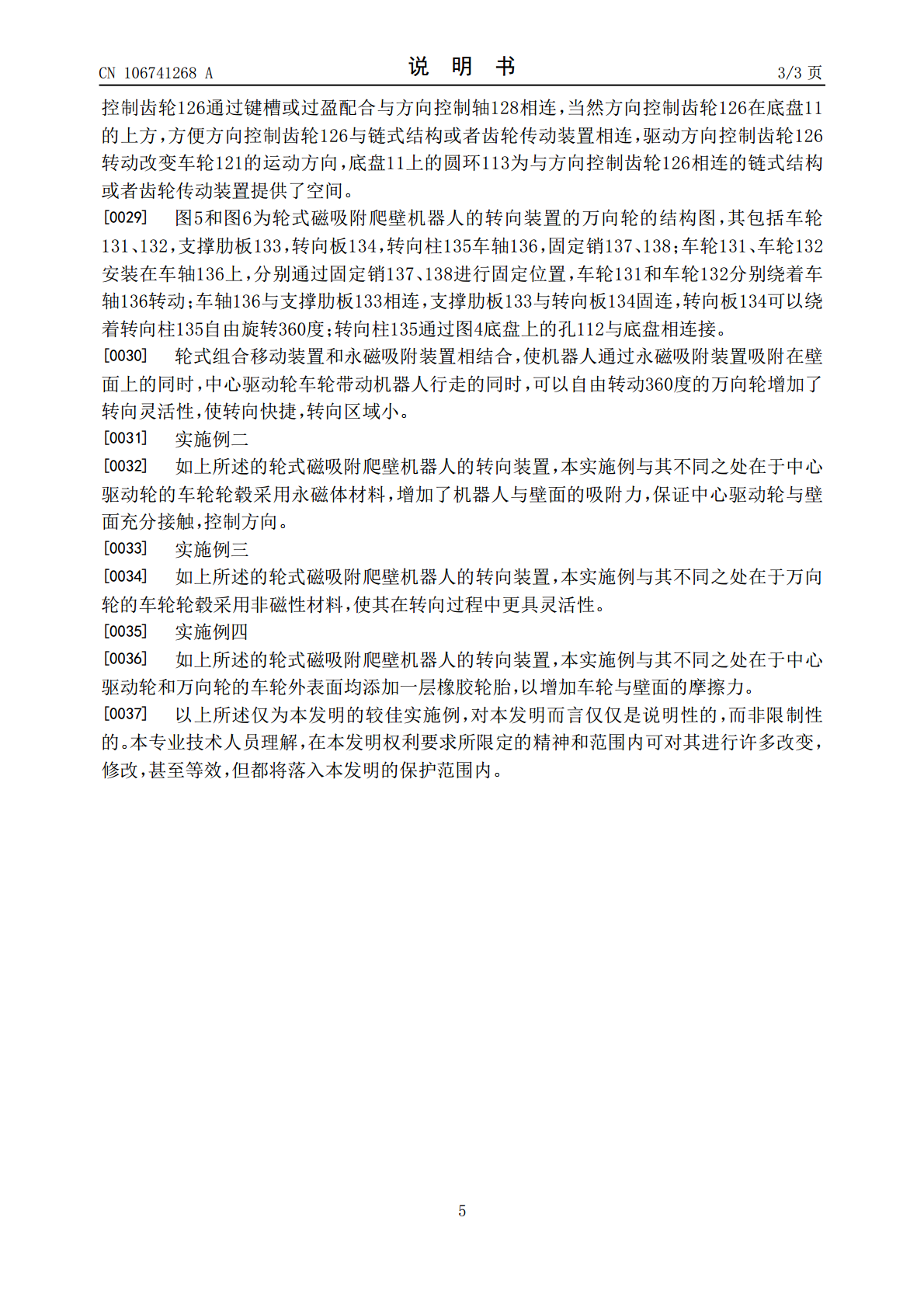
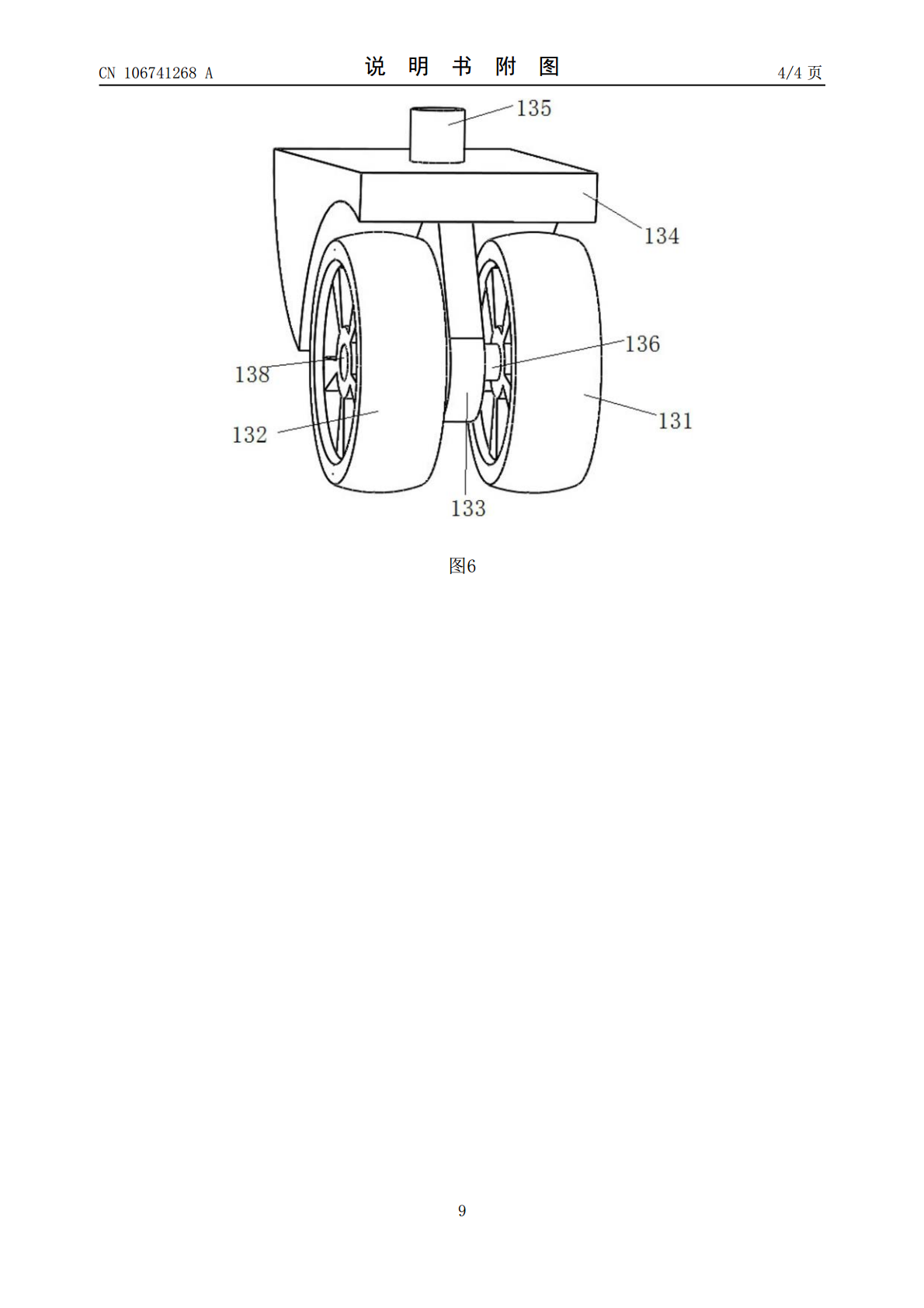
本发明公开一种轮式磁吸附爬壁机器人的转向装置,其包括轮式组合移动装置和永磁吸附装置,所述轮式组合移动装置包括底盘和分别安装于所述底盘上的一个中心驱动轮和四个被动万向轮,所述被动万向轮可以进行360°自由旋转,转向灵活;通过螺纹与所述底盘连接的所述永磁吸附装置采用永磁体材料,通过非接触方式对导磁壁面进行吸附。这样,轮式组合移动装置和永磁吸附装置相结合,使机器人通过永磁吸附装置吸附在壁面上的同时,中心驱动轮车轮带动机器人行走的同时,可以自由转动360度的万向轮增加了转向灵活性,使转向快捷,转向区域小。

一种轮式磁吸附爬壁机器人.pdf
本发明公开了一种轮式磁吸附爬壁机器人,属于机器人技术领域。其包括车体、车轮模块及吸附模块;车体包括车架及车轮搭载平台,车轮搭载平台包括自适应车轮搭载平台及固定式车轮搭载平台,固定式车轮搭载平台与所述车架连接,自适应车轮搭载平台通过转动机构与车架连接;转动机构包括转轴、转轴支撑架及扭簧;车轮模块包括车轮、RV减速机及步进电机;吸附模块包括多个用于将机器人吸附到作业圆柱壁面的吸附磁条。本发明采用永磁吸附形式与四轮四驱传动结构,结构简单,机器人能够自适应贴合不同曲率半径的导磁壁面,极大的提高了工作效率,保证爬壁
一种轮式磁吸附爬壁机器人.pdf
本发明公开一种轮式磁吸附爬壁机器人,涉及智能机械技术领域,包括:机架;被动变换姿态装置,所述被动变换姿态装置设置于机架的下侧,所述被动变换姿态装置具有多维度位移与旋转功能;驱动装置,所述驱动装置包括第一驱动机构与第二驱动机构,所述第一驱动机构固定于机架的下侧,所述第二驱动机构设置于被动变换姿态装置的下侧,所述被动变换姿态装置实现第二驱动机构的多维度位移与旋转,所述驱动装置吸附管壁并驱动机架整体移动;本发明有效避免了轮式磁吸附爬壁机器人在非平整工作面上行走时出现的各个电机不同步现象,有利于轮式磁吸附爬壁机器

一种模块化轮式磁吸附爬壁机器人.pdf
本发明涉及工业机器人技术领域,公开的一种模块化轮式磁吸附爬壁机器人,包括两个相互独立的车体模块和四组结构相同的轮式永磁吸附单元,两个相互独立的车体模块分为结构相同的左车体模块和右车体模块,二者连接平面为中心呈对称布置,其中左车体模块由左车箱体内的左车箱体驱动电机通过左车箱体电机驱动器、左车箱体减速器与左车箱体前输出轴连接,左车箱体前输出轴通过左车箱体同步带、左车箱体同步带轮、与左车箱体后输出轴连接构成。本发明能够在各类导磁面上通过非连续作业区域或狭窄运输空间开展除锈、喷漆、检测等相应极限作业。同时具备防尘
一种磁吸附轮式爬壁机器人的胎压稳定装置.pdf
本发明在于提供一种磁吸附轮式爬壁机器人的胎压稳定装置。本发明包括蓄能储气罐、压力释放阀、压力调节阀和压力表。所述的蓄能储气罐一端设有充气口,另一端与压力调节阀输入端相连,所述的压力调节阀输出端经三通接头与轮胎气门嘴、压力释放阀的入口端连接,所述的压力调节阀和压力释放阀用于设置磁吸附轮式爬壁机器人的轮胎的工作压力,所述的胎压稳定装置固定在磁吸附轮式爬壁机器人轮子的轮毂上,随轮毂一起滚动。本发明通过胎压稳定装置来稳定轮胎的胎压,进而避免了胎压改变对机器人工作性能产生的不利影响。