
一种机器人砂带磨抛系统的磨抛机接触轮自动退让方法.pdf

曾琪****是我

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种机器人砂带磨抛系统的磨抛机接触轮自动退让方法.pdf
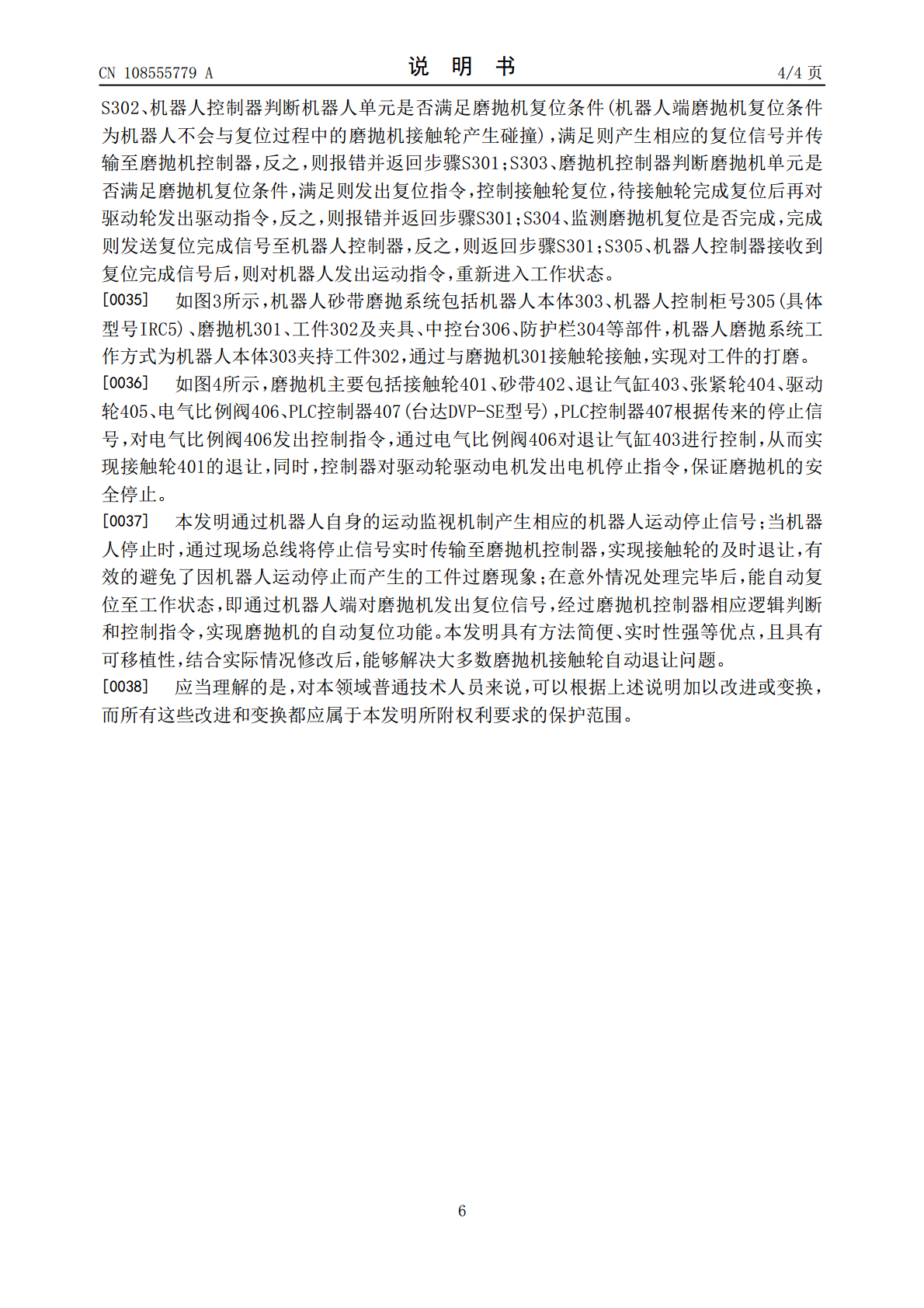
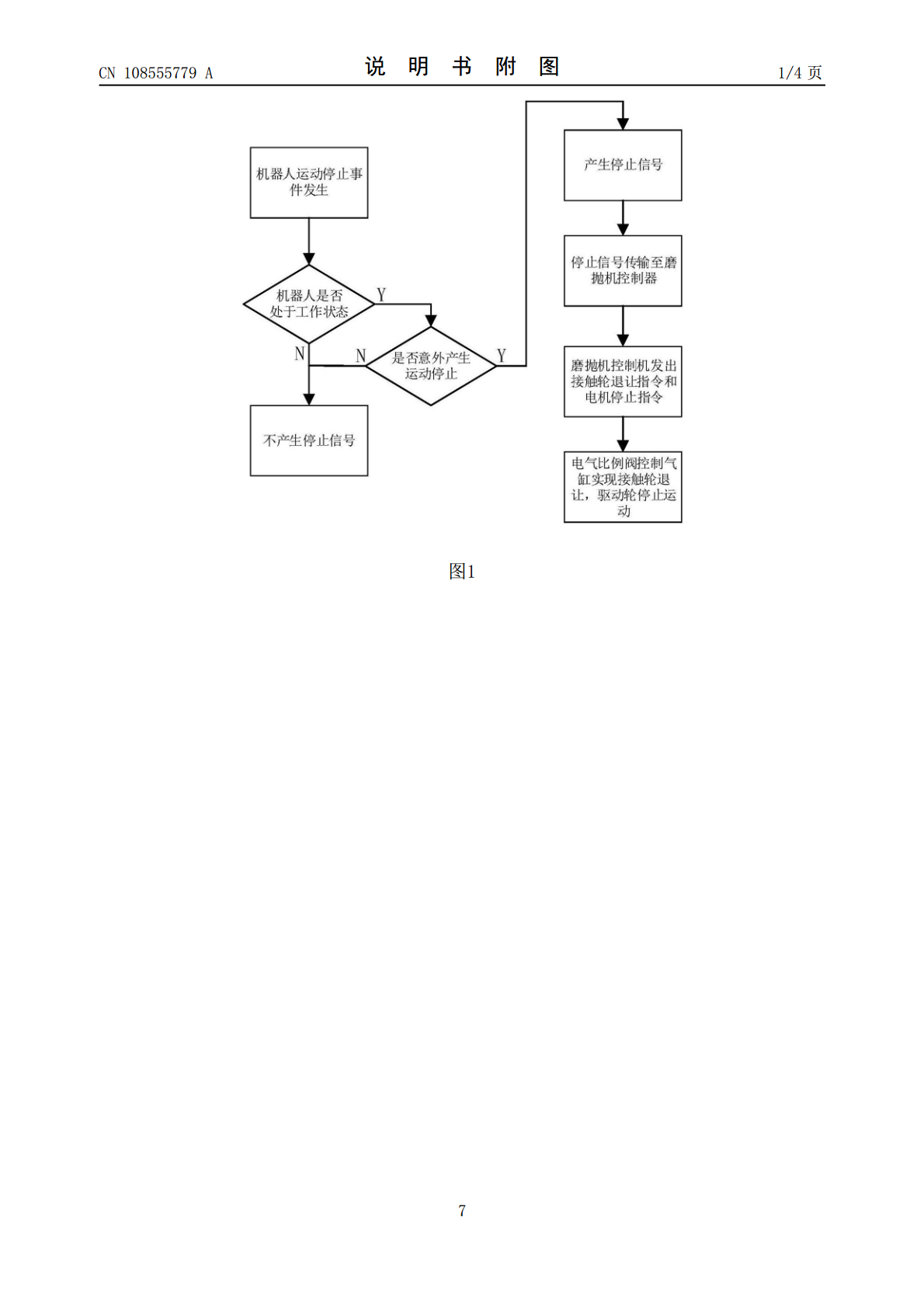
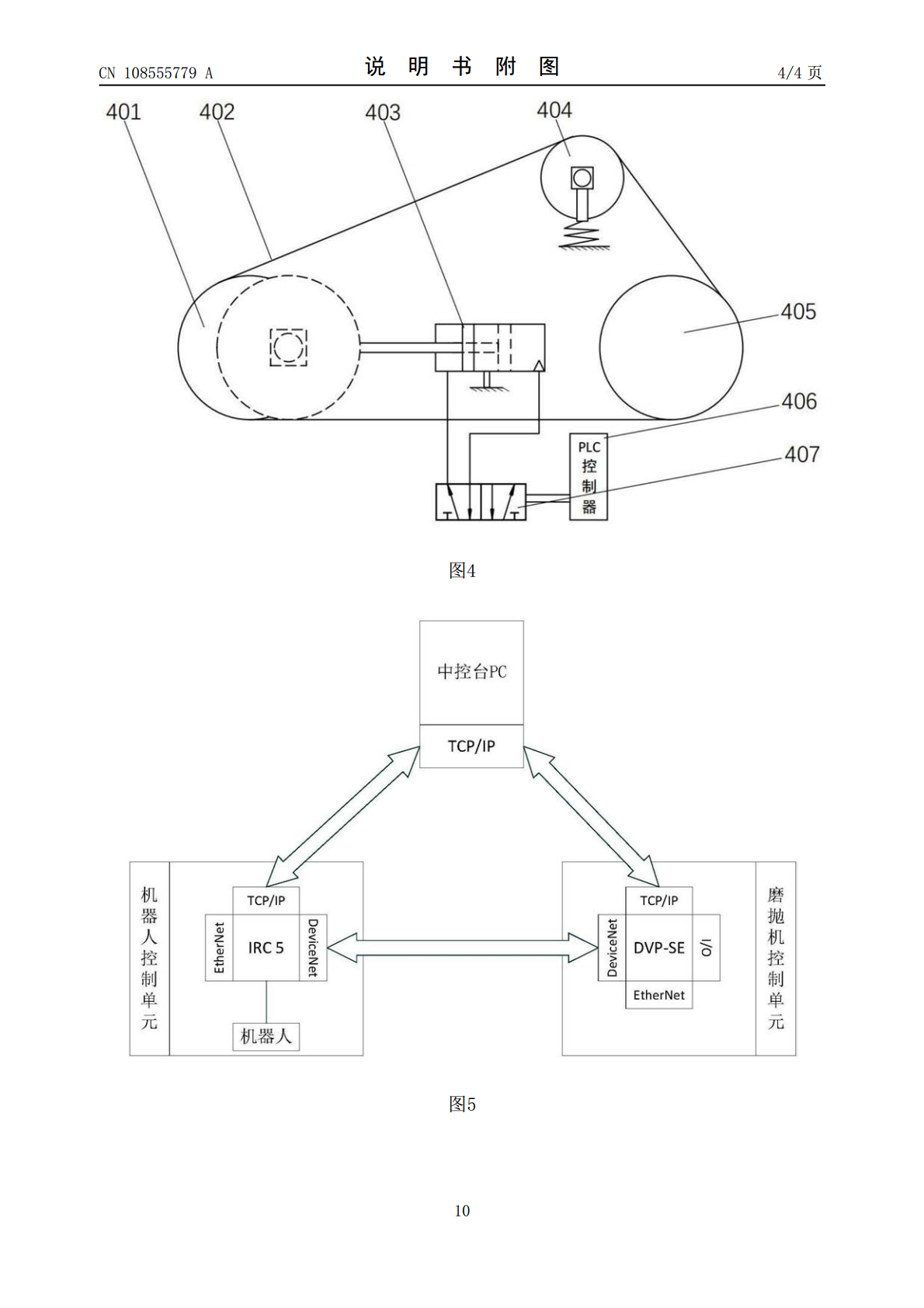
本发明公开了一种机器人砂带磨抛系统的磨抛机接触轮自动退让方法,包括以下步骤:S1、当机器人本体夹持工件在磨抛机上进行打磨作业发生突发状况时,机器人控制器产生停止信号;S2、磨抛机控制器接收停止信号后,对磨抛机接触轮退让气缸电气比例阀发出控制指令,并通过控制气缸气压大小调节磨抛机退让气缸的运动,实现磨抛机接触轮的及时退让;S3、在突发状况处理完成后,机器人控制器发送复位信号给磨抛机控制器,磨抛机控制器随即控制退让气缸和驱动轮电机协同工作,实现磨抛机的复位与正常工作。本发明实现了磨抛机接触轮在磨抛系统发生突发

一种磨抛装置及磨抛机.pdf
一种磨抛装置及磨抛机,用于磨抛绕自身轴线旋转的圆柱状工件外周面,该磨抛装置包括刀架、同轴相对设置在刀架上的主动轴和从动轴、驱动主动轴转动的主电机和磨具,磨具包括安装在主动轴与从动轴之间的刀轴、固定设置在刀轴上的圆柱状磨轮,圆柱状磨轮的外周面轮廓与圆柱状工件的外周面轮廓相嵌合,工作时,刀轴与圆柱状工件平行布置,并使磨轮可无缝贴合圆柱状工件的外周面进行磨抛。

工业机器人自动磨抛系统.docx
20101^it农况第4期'FUJIANNONGJIFUJIANNONGJI-41~翠卷I谚建农机弟4期IFUJIANNONGJI_•&-40-FUJIANNONGJIFUJIANNONGJI39:I诡建衣机第4期IFUJIANNONGJI工业机器人自动磨抛系统刘克(福建交通职业技术学院,福建福州350007)摘要:介绍一种用于卫浴产品表面加工的工业机器人自动磨抛系统,着重介绍砂抛加工机构和布抛加工机构的基本原理,以及它们的控制系统和主要控制变量。实践证明,采用这种加工设备,可以使卫浴产品的生产达到要求。
工业机器人自动磨抛系统.docx
20101^it农况第4期'FUJIANNONGJIFUJIANNONGJI-41~翠卷I谚建农机弟4期IFUJIANNONGJI_•&-40-FUJIANNONGJIFUJIANNONGJI39:I诡建衣机第4期IFUJIANNONGJI工业机器人自动磨抛系统刘克(福建交通职业技术学院,福建福州350007)摘要:介绍一种用于卫浴产品表面加工的工业机器人自动磨抛系统,着重介绍砂抛加工机构和布抛加工机构的基本原理,以及它们的控制系统和主要控制变量。实践证明,采用这种加工设备,可以使卫浴产品的生产达到要求。

一种用于晶片双面磨抛机的承载盘及其磨抛机和磨抛方法.pdf
一种用于晶片双面磨抛机的承载盘,包括盘体、晶片工位和啮合齿,所述盘体被设置在双面磨抛机的上、下磨盘之间,啮合齿设置在盘体的外缘,待加工晶片分别被固定在盘体上表面和下表面的晶片工位处。本发明还包括一种使用上述承载盘的双面磨抛机,以及一种对晶片进行双面磨抛的方法。该方法包括:将两组待加工的晶片分别固定在承载盘上下表面的晶片工位;启动磨抛机对上下两组晶片的一个表面进行磨抛;当上述磨抛完成后,将上下两组晶片取下并反置固定在晶片工位,对晶片的另一个表面进行磨抛,或者放入另一组晶片进行磨抛。