
夹持器驱动装置与夹持器.pdf

雨巷****碧易


1/10

2/10
3/10
4/10
5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
夹持器驱动装置与夹持器.pdf
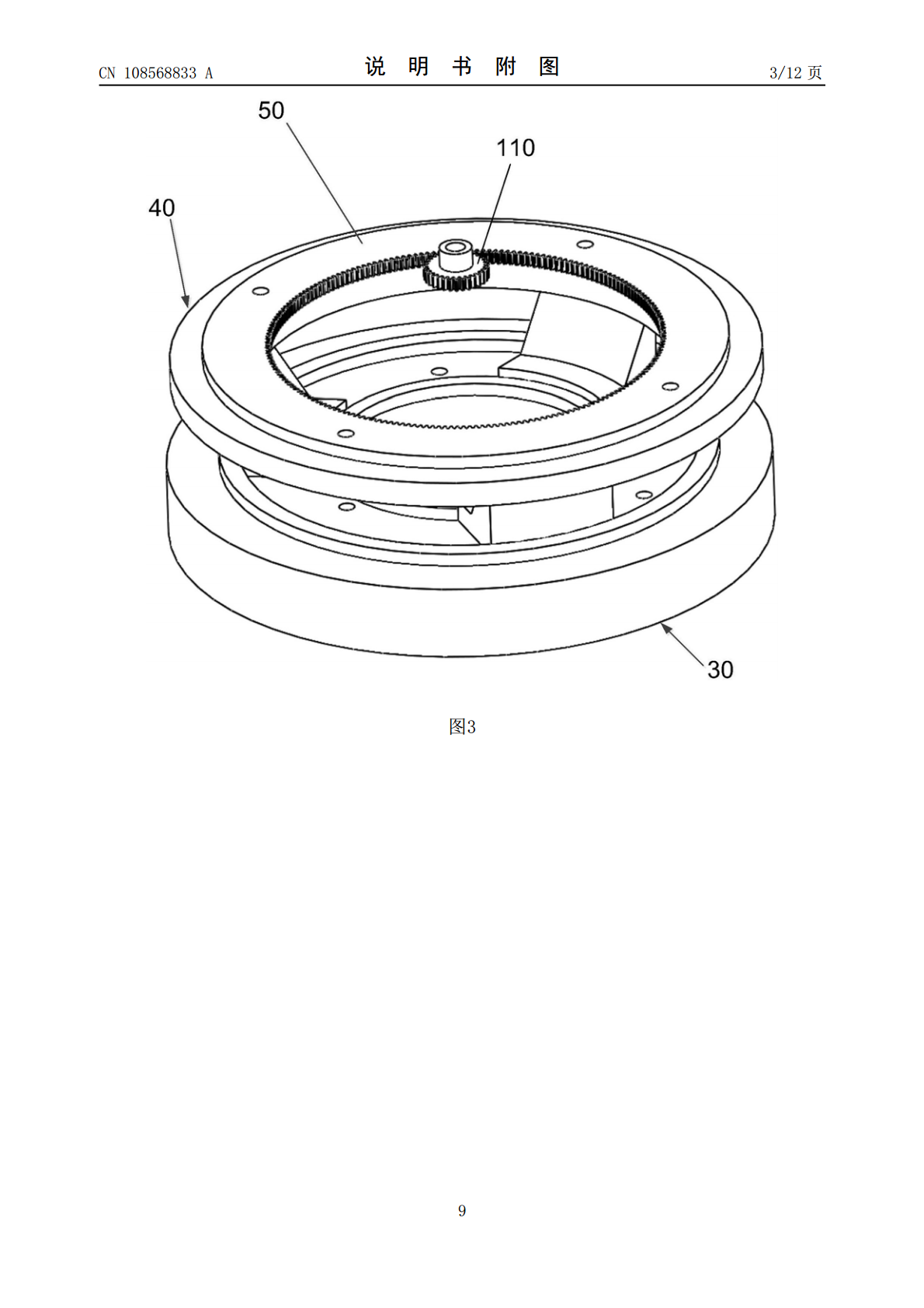
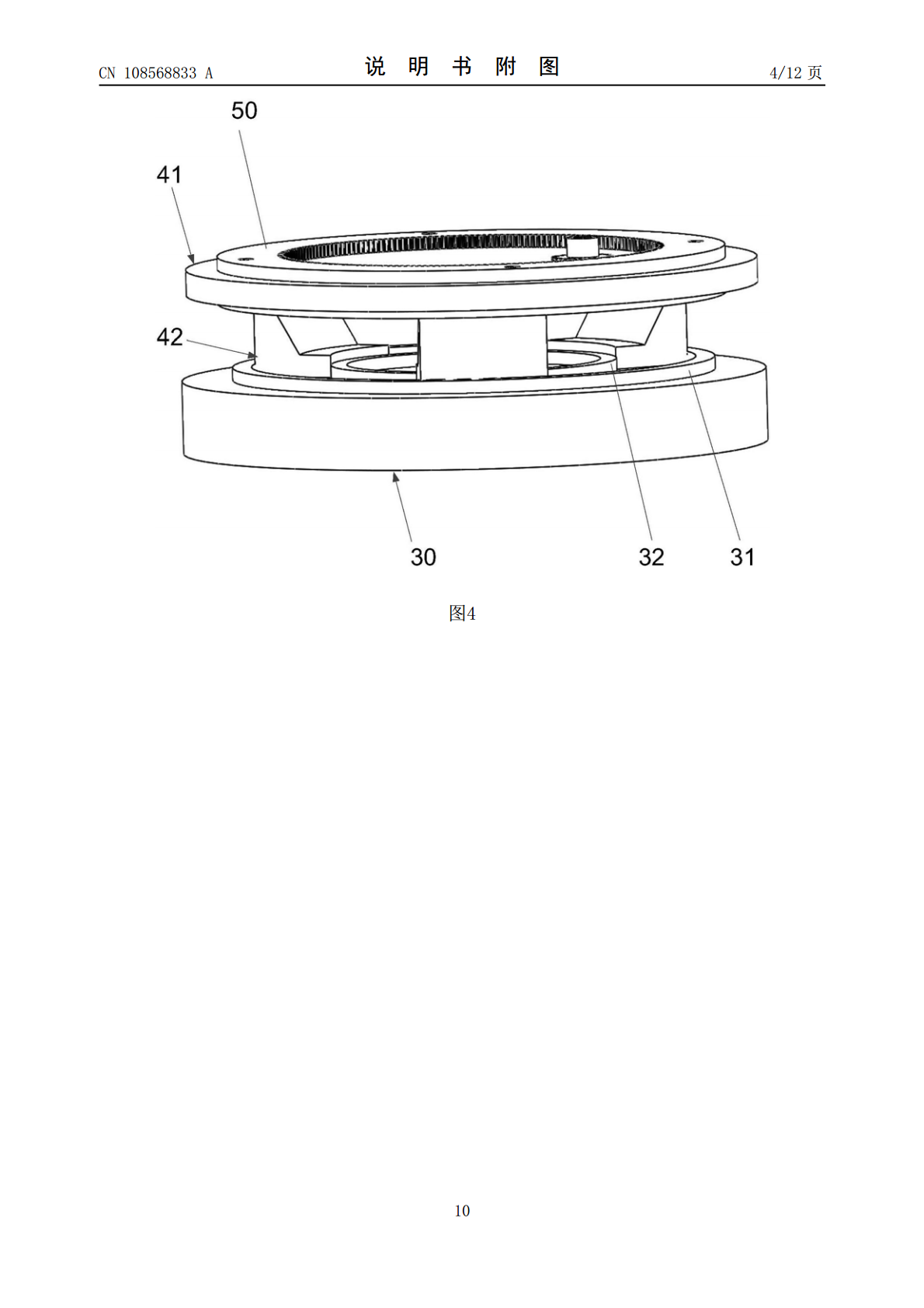
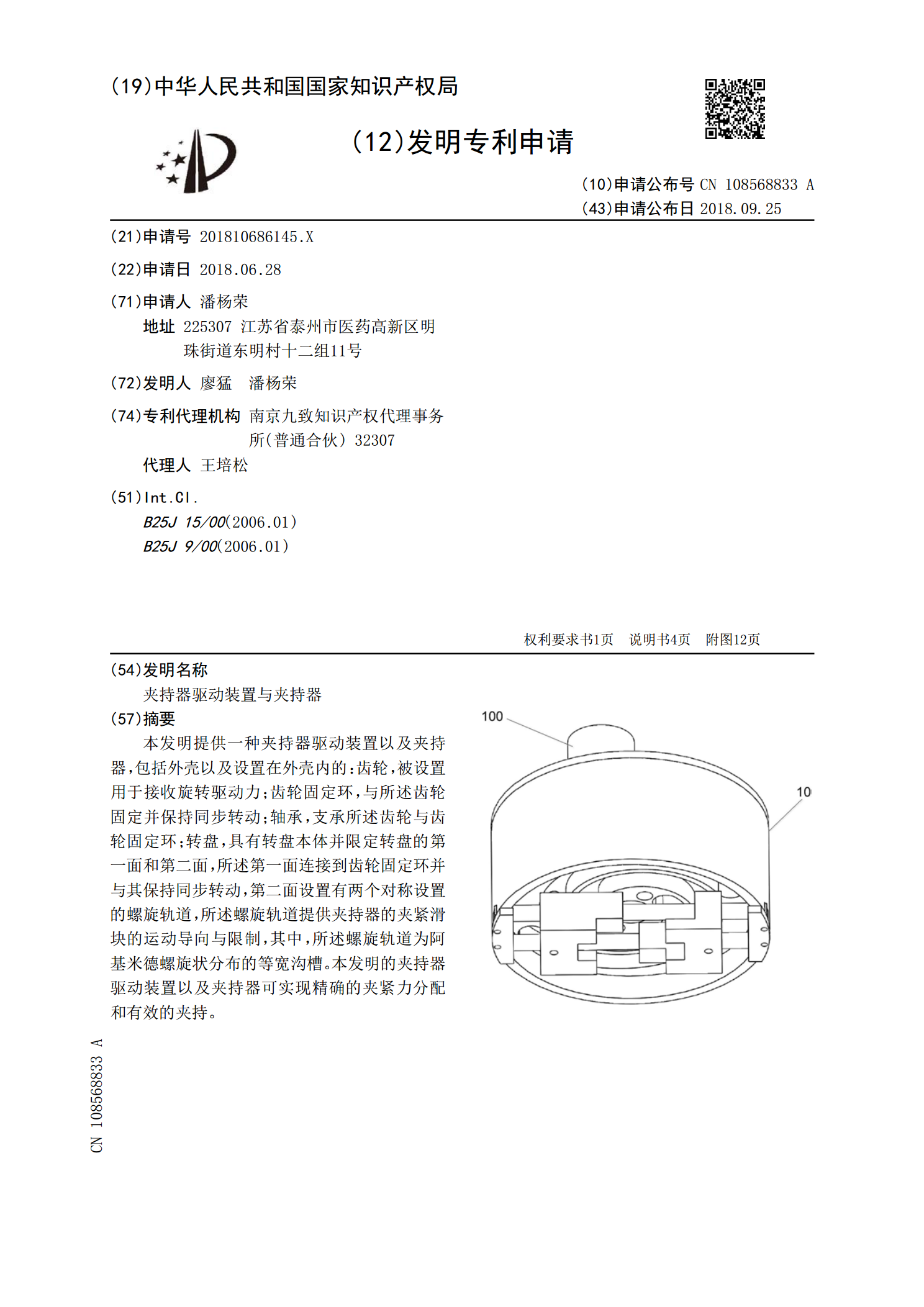
本发明提供一种夹持器驱动装置以及夹持器,包括外壳以及设置在外壳内的:齿轮,被设置用于接收旋转驱动力;齿轮固定环,与所述齿轮固定并保持同步转动;轴承,支承所述齿轮与齿轮固定环;转盘,具有转盘本体并限定转盘的第一面和第二面,所述第一面连接到齿轮固定环并与其保持同步转动,第二面设置有两个对称设置的螺旋轨道,所述螺旋轨道提供夹持器的夹紧滑块的运动导向与限制,其中,所述螺旋轨道为阿基米德螺旋状分布的等宽沟槽。本发明的夹持器驱动装置以及夹持器可实现精确的夹紧力分配和有效的夹持。

夹持器发射装置及夹持器.pdf
本发明提供了一种夹持器发射装置,包括驱动轮1、转轴2、驱动杆3、壳体4、推杆5和弹片6,壳体4内设置有夹持器7的移动轨道41,驱动轮1驱动夹持器7沿移动轨道41向所述壳体4上的出口42移动,在出口42处有推杆5将弹片6和夹持器7撑开,当夹持器7夹住被夹物体后,驱动杆3和推杆5复位。本发明还提供了一种相配套的夹持器。根据本发明提供过的夹持器发射装置和夹持器,可以连续、轻松的发射出头皮夹,并自动将头皮夹张开一定的角度,夹住患者的头皮,进行止血和固定,从而提高手术的速度,节省放置头皮夹的时间,同时降低医生的工作
夹持器.pdf
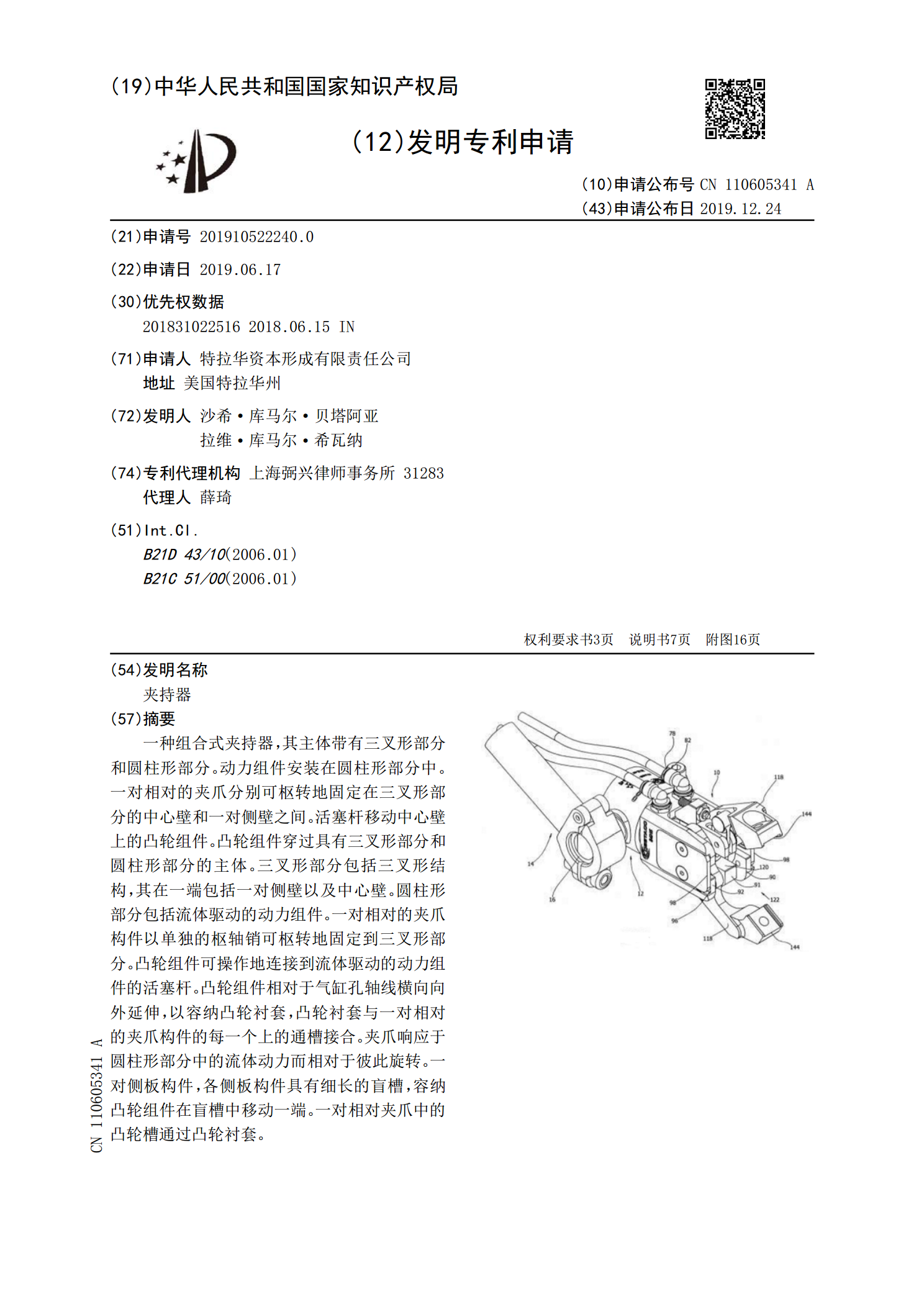
一种组合式夹持器,其主体带有三叉形部分和圆柱形部分。动力组件安装在圆柱形部分中。一对相对的夹爪分别可枢转地固定在三叉形部分的中心壁和一对侧壁之间。活塞杆移动中心壁上的凸轮组件。凸轮组件穿过具有三叉形部分和圆柱形部分的主体。三叉形部分包括三叉形结构,其在一端包括一对侧壁以及中心壁。圆柱形部分包括流体驱动的动力组件。一对相对的夹爪构件以单独的枢轴销可枢转地固定到三叉形部分。凸轮组件可操作地连接到流体驱动的动力组件的活塞杆。凸轮组件相对于气缸孔轴线横向向外延伸,以容纳凸轮衬套,凸轮衬套与一对相对的夹爪构件的每一
夹持器.pdf
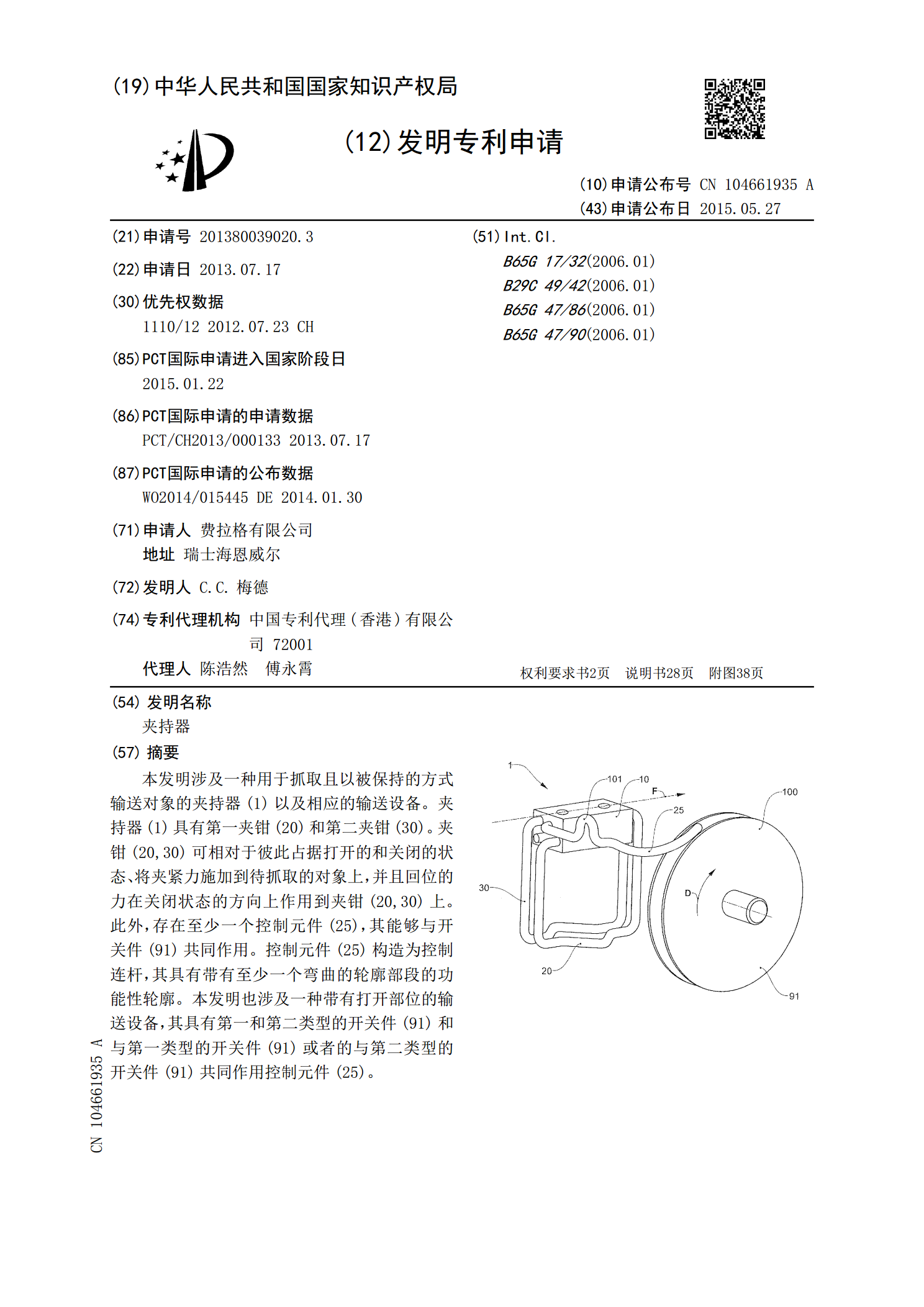
本发明涉及一种用于抓取且以被保持的方式输送对象的夹持器(1)以及相应的输送设备。夹持器(1)具有第一夹钳(20)和第二夹钳(30)。夹钳(20,30)可相对于彼此占据打开的和关闭的状态、将夹紧力施加到待抓取的对象上,并且回位的力在关闭状态的方向上作用到夹钳(20,30)上。此外,存在至少一个控制元件(25),其能够与开关件(91)共同作用。控制元件(25)构造为控制连杆,其具有带有至少一个弯曲的轮廓部段的功能性轮廓。本发明也涉及一种带有打开部位的输送设备,其具有第一和第二类型的开关件(91)和与第一类型的

夹持器.pdf
本实用新型是提供一种能减小其尺寸,方便CT光源近距离靠近样品,且操作方便的夹持器,以便于对样品作高分辨率特征的CT检测,涉及夹持工具技术领域。夹持器,包括样品柱、压紧件和弹性件,所述样品柱的一端端面上设有沿样品柱的轴线方向设置的V形或弧形结构的夹持块,所述夹持块的V形或弧形槽形成与样品侧面配合的定位槽;所述压紧件与所述定位槽相对设置,以用于压紧定位槽内的样品;所述弹性件的一端与压紧件连接,另一端与样品柱连接,以向压紧件提供压紧定位槽内样品的压紧力。本实用新型可以提高检测效率。