
空心圆柱工件表面缺陷检测系统及方法.pdf

景福****90


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
空心圆柱工件表面缺陷检测系统及方法.pdf
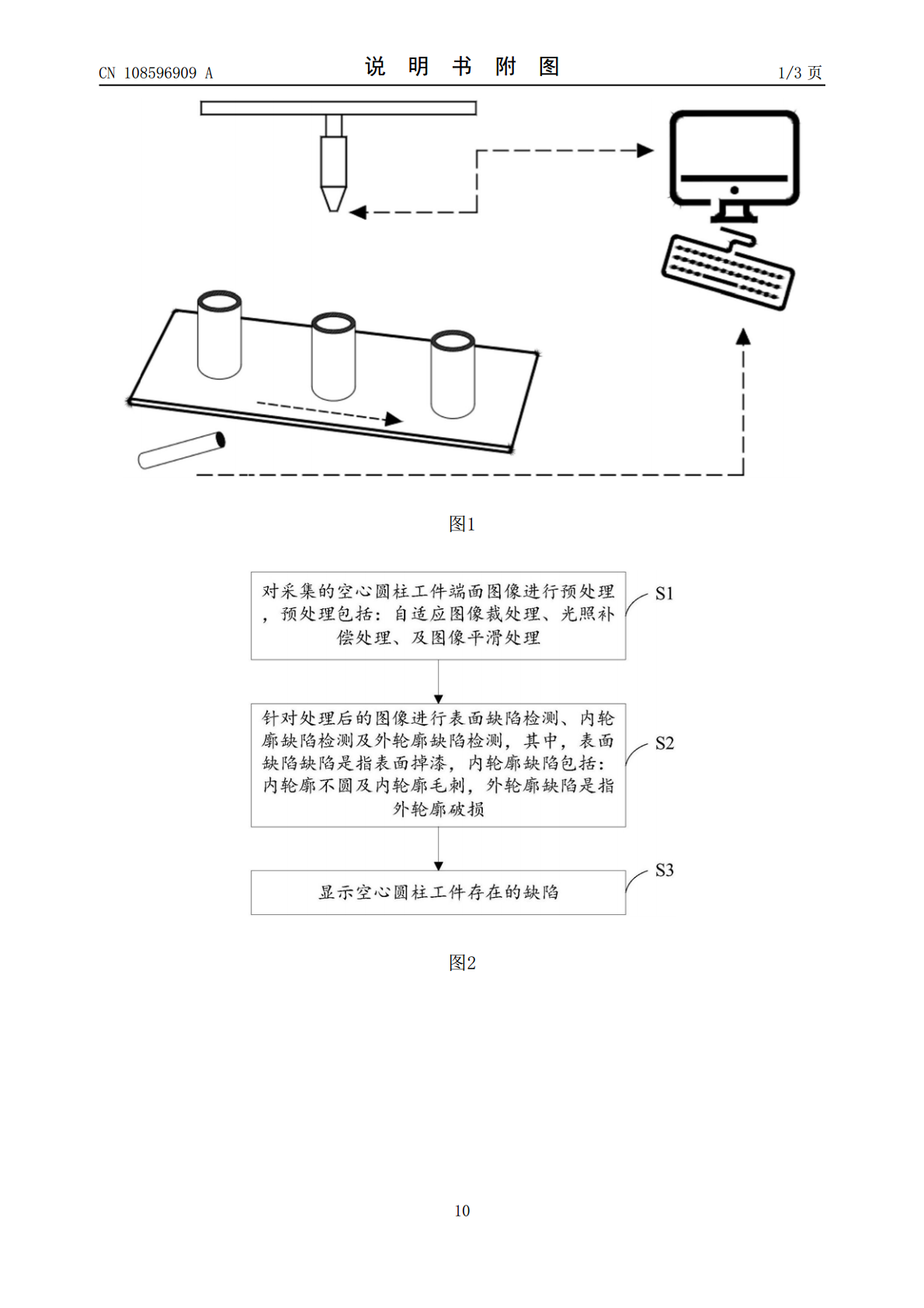
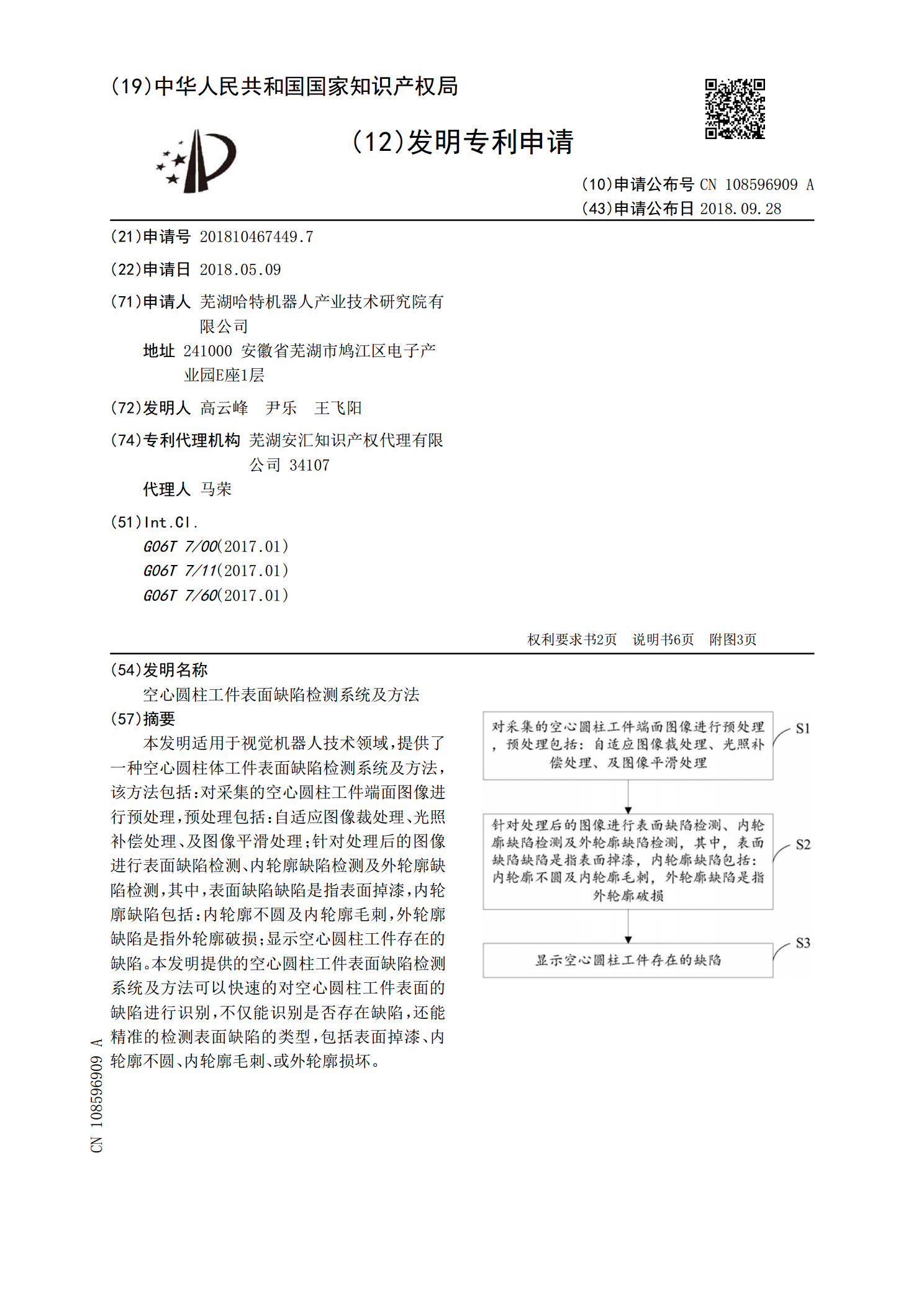
本发明适用于视觉机器人技术领域,提供了一种空心圆柱体工件表面缺陷检测系统及方法,该方法包括:对采集的空心圆柱工件端面图像进行预处理,预处理包括:自适应图像裁处理、光照补偿处理、及图像平滑处理;针对处理后的图像进行表面缺陷检测、内轮廓缺陷检测及外轮廓缺陷检测,其中,表面缺陷缺陷是指表面掉漆,内轮廓缺陷包括:内轮廓不圆及内轮廓毛刺,外轮廓缺陷是指外轮廓破损;显示空心圆柱工件存在的缺陷。本发明提供的空心圆柱工件表面缺陷检测系统及方法可以快速的对空心圆柱工件表面的缺陷进行识别,不仅能识别是否存在缺陷,还能精准的检

工件的表面缺陷检测装置及检测方法、工件的表面检查系统以及程序.pdf
使用多个图像计算多个图像中的统计性的偏差值来制作合成图像,根据所制作的合成图像来进行缺陷检测,其中所述多个图像是通过在利用在作为表面缺陷的检测对象的工件(1)的同一位置引起周期性的亮度变化的照明装置(6)对工件进行照明的状态下摄像单元(8)连续地对工件进行摄像而得到的,并且所述多个图像是在周期性的亮度变化的1个周期中得到的。
工件表面缺陷检测方法和装置.pdf
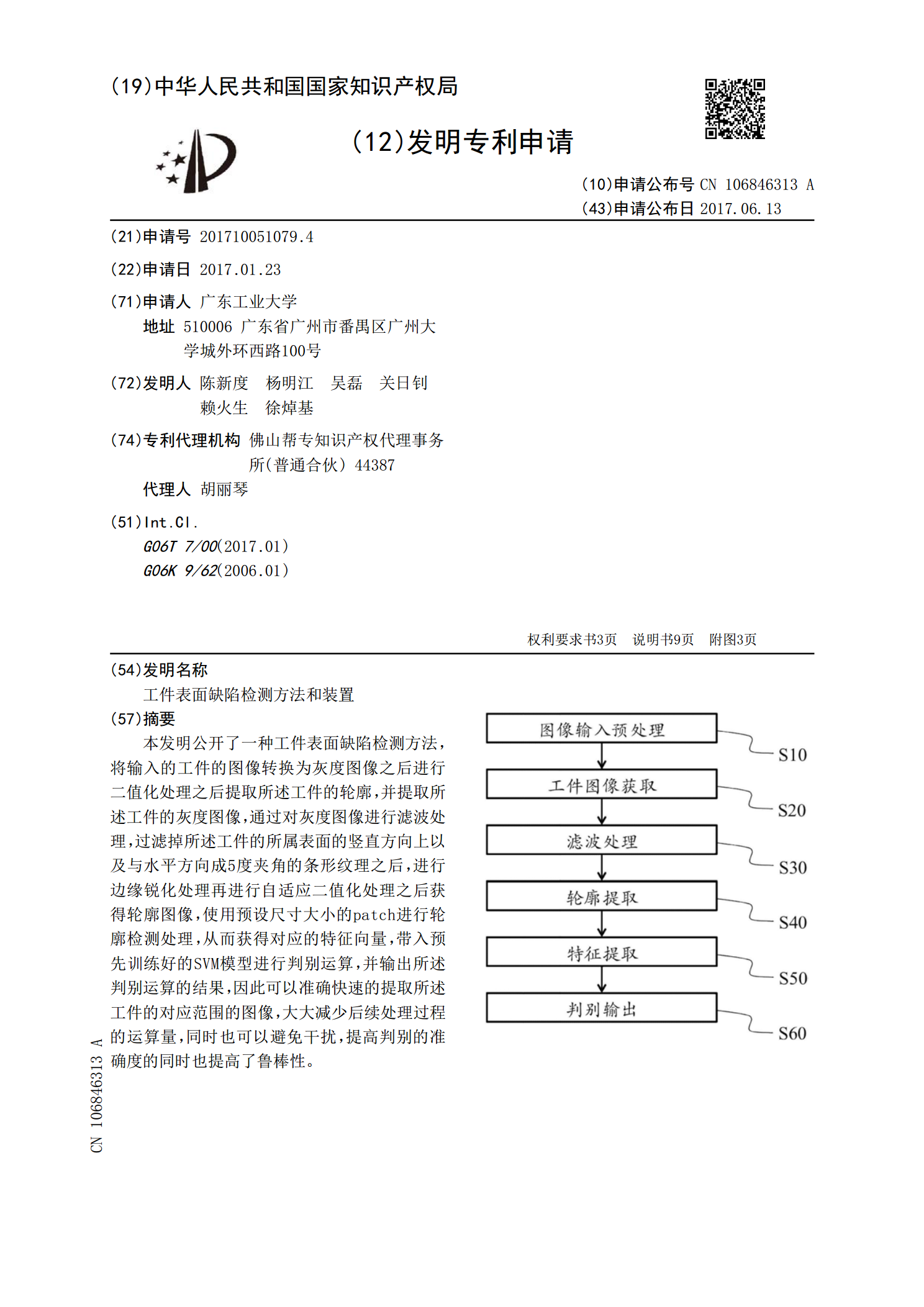
本发明公开了一种工件表面缺陷检测方法,将输入的工件的图像转换为灰度图像之后进行二值化处理之后提取所述工件的轮廓,并提取所述工件的灰度图像,通过对灰度图像进行滤波处理,过滤掉所述工件的所属表面的竖直方向上以及与水平方向成5度夹角的条形纹理之后,进行边缘锐化处理再进行自适应二值化处理之后获得轮廓图像,使用预设尺寸大小的patch进行轮廓检测处理,从而获得对应的特征向量,带入预先训练好的SVM模型进行判别运算,并输出所述判别运算的结果,因此可以准确快速的提取所述工件的对应范围的图像,大大减少后续处理过程的运算量
一种工件表面缺陷检测方法.pdf
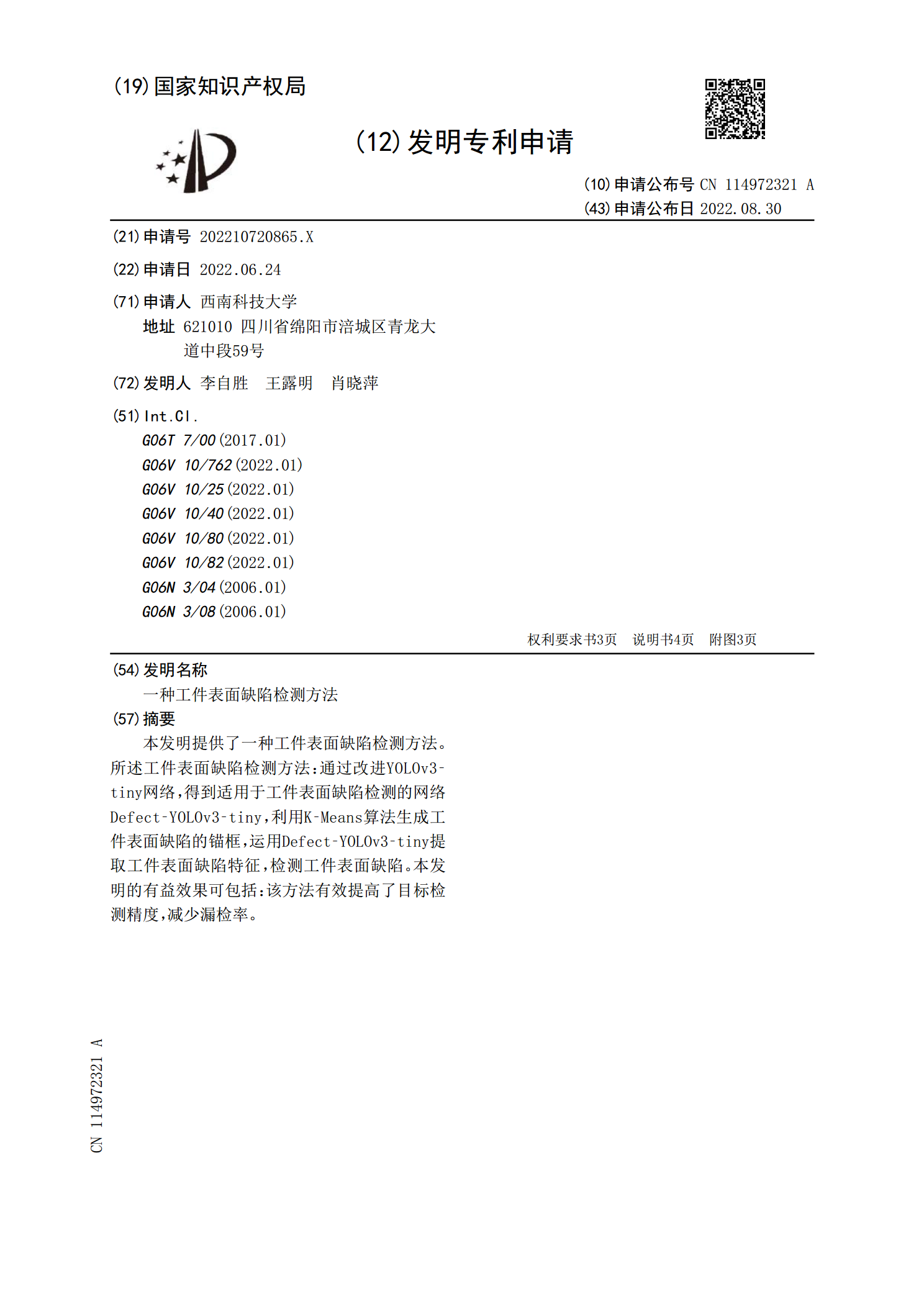
本发明提供了一种工件表面缺陷检测方法。所述工件表面缺陷检测方法:通过改进YOLOv3‑tiny网络,得到适用于工件表面缺陷检测的网络Defect‑YOLOv3‑tiny,利用K‑Means算法生成工件表面缺陷的锚框,运用Defect‑YOLOv3‑tiny提取工件表面缺陷特征,检测工件表面缺陷。本发明的有益效果可包括:该方法有效提高了目标检测精度,减少漏检率。
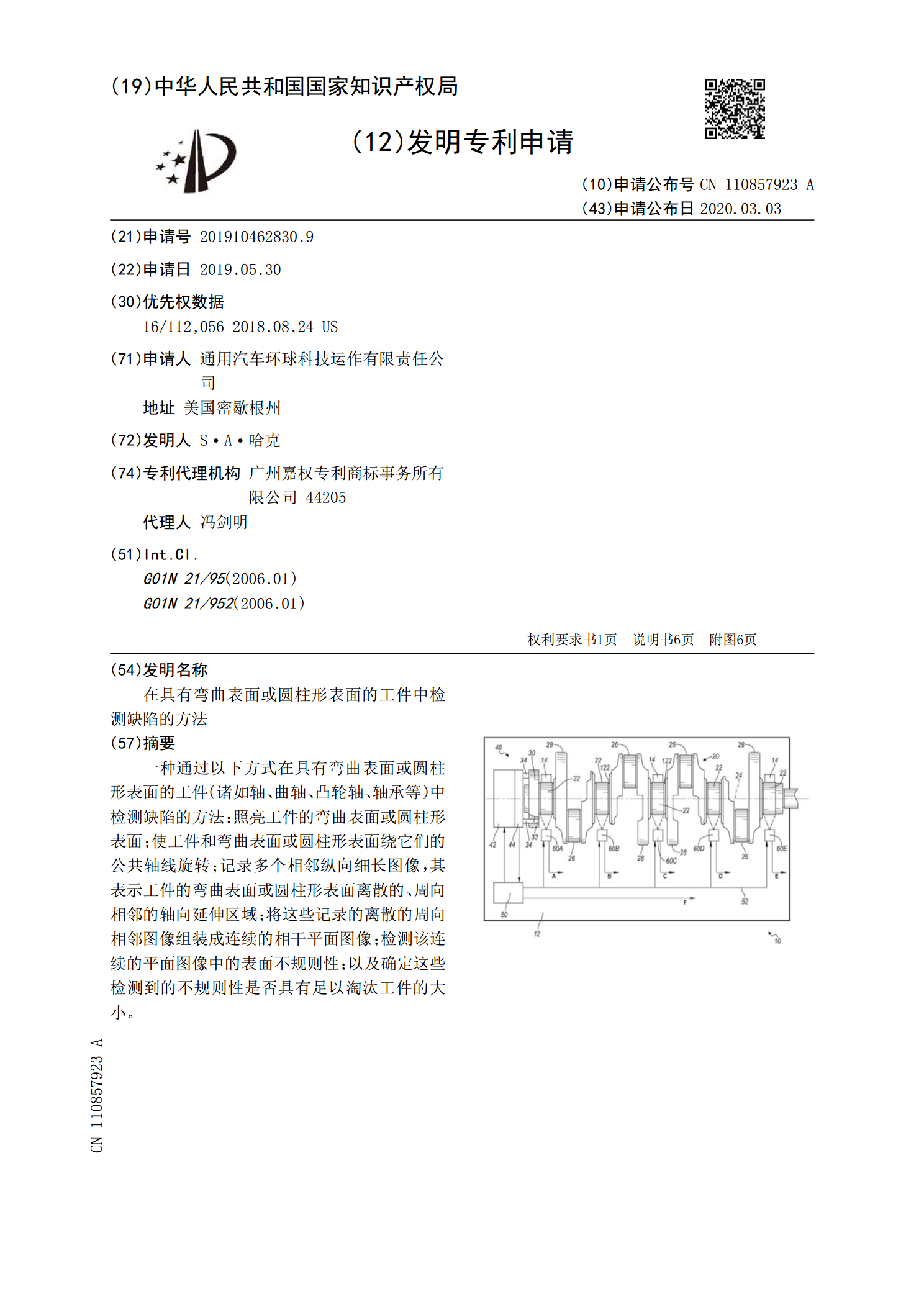
在具有弯曲表面或圆柱形表面的工件中检测缺陷的方法.pdf
一种通过以下方式在具有弯曲表面或圆柱形表面的工件(诸如轴、曲轴、凸轮轴、轴承等)中检测缺陷的方法:照亮工件的弯曲表面或圆柱形表面;使工件和弯曲表面或圆柱形表面绕它们的公共轴线旋转;记录多个相邻纵向细长图像,其表示工件的弯曲表面或圆柱形表面离散的、周向相邻的轴向延伸区域;将这些记录的离散的周向相邻图像组装成连续的相干平面图像;检测该连续的平面图像中的表面不规则性;以及确定这些检测到的不规则性是否具有足以淘汰工件的大小。