
四轮驱动车辆的控制装置.pdf

康平****ng

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10

10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

四轮驱动车辆的控制装置.pdf
本发明涉及四轮驱动车辆的控制装置,被应用于具有:差动限制装置,能够变更前轮用旋转轴与后轮用旋转轴的差动的限制程度;和制动装置,构成为以前轮的制动力与后轮的制动力的分配比成为恒定值的方式变更前轮的制动力和后轮的制动力并且能够相互独立地设定各车轮的制动力的四轮驱动车辆。本控制装置具备:差动限制控制部,使差动限制装置变更差动的限制程度;和制动控制部,使制动装置进行EBD控制以及ABS控制。制动控制部构成为在正进行EBD控制的情况下开始了ABS控制时,使制动装置中止EBD控制,差动限制控制部在正进行EBD控制的情
电动四轮驱动车辆的控制方法以及电动四轮驱动车辆的控制装置.pdf
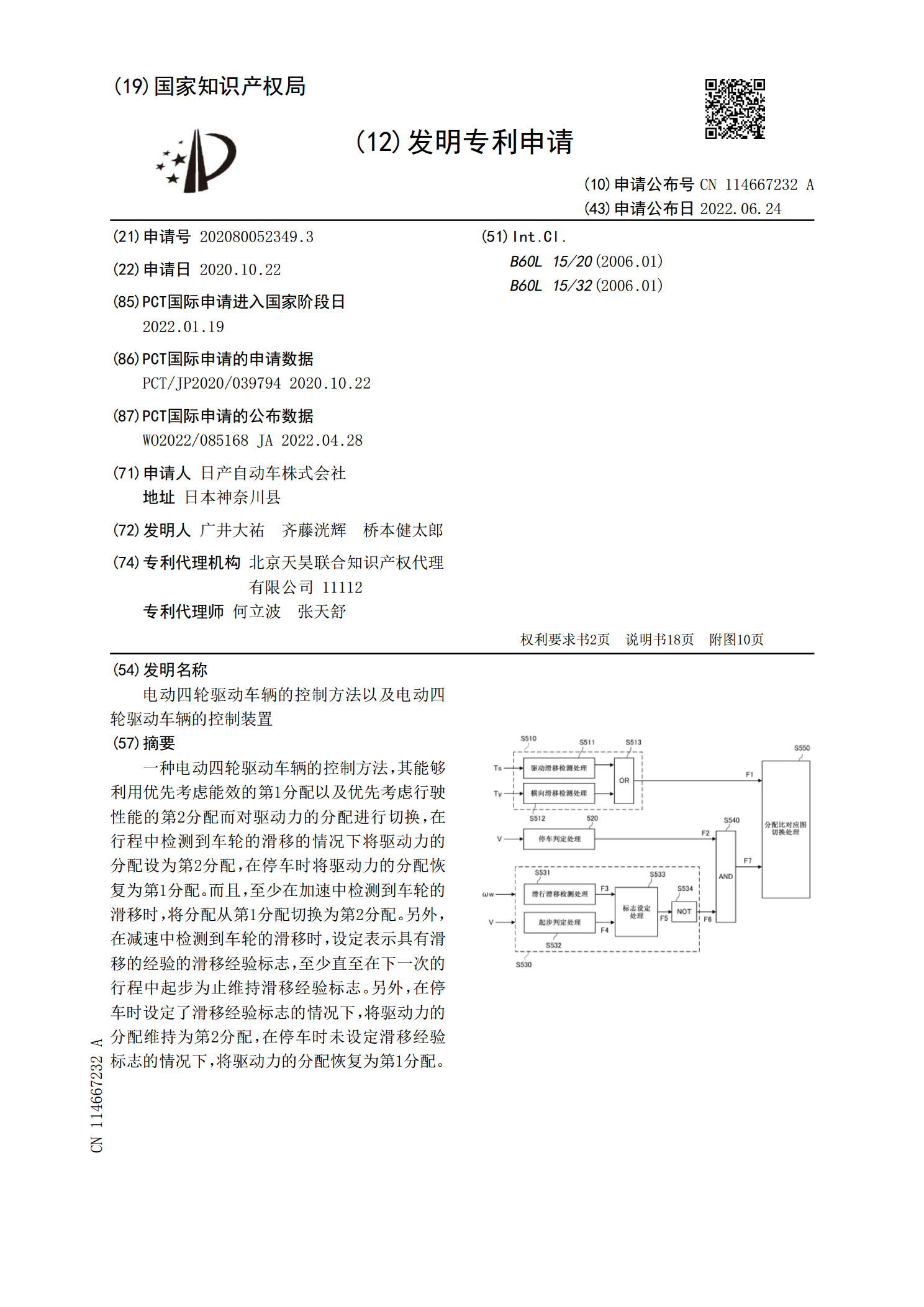
一种电动四轮驱动车辆的控制方法,其能够利用优先考虑能效的第1分配以及优先考虑行驶性能的第2分配而对驱动力的分配进行切换,在行程中检测到车轮的滑移的情况下将驱动力的分配设为第2分配,在停车时将驱动力的分配恢复为第1分配。而且,至少在加速中检测到车轮的滑移时,将分配从第1分配切换为第2分配。另外,在减速中检测到车轮的滑移时,设定表示具有滑移的经验的滑移经验标志,至少直至在下一次的行程中起步为止维持滑移经验标志。另外,在停车时设定了滑移经验标志的情况下,将驱动力的分配维持为第2分配,在停车时未设定滑移经验标志的

四轮驱动车辆的控制装置.pdf
四轮驱动车辆的控制装置在车辆的制动中,对使车辆向左或者向右偏转的横摆运动的程度是否大于规定的第一程度进行判定,在判定为横摆运动的程度大于第一程度的情况下,使对应于与横摆运动的方向处于相同侧的后轮的联轴器装置的联轴器扭矩向大于零的规定的第一扭矩值增加,并且将对应于与横摆运动的方向处于相反侧的后轮的联轴器装置的联轴器扭矩维持为零。

四轮驱动车辆的控制装置.pdf
本发明涉及四轮驱动车辆的控制装置。该四轮驱动车辆的控制装置应用于具有能够变更前轮用旋转轴(32)与后轮用旋转轴(33)差动的限制程度的差动限制装置(34)、和能够相互独立地变更前轮的制动力以及后轮的制动力的制动装置(40)的四轮驱动车辆。本控制装置在将差动的限制程度设定为第二程度以便不允许由中央差速器装置(31)实现的差动的情况下,判定是否产生了特定状态,该特定状态是假定将差动的限制程度设定为第一程度时发生后轮滑移率(SLr)大于前轮滑移率(SLf)的状态的可能性高的状态,当判定为产生了特定状态时,将差动

四轮驱动车辆的控制装置.pdf
本公开提供一种四轮驱动车辆的控制装置,其相对于车辆使用过程中的电子控制联轴器的时间性的变化而高精度地对传递转矩进行控制。在车辆行驶过程中,由于在对离合器鼓(94L)施加有制动转矩(Ts1)时,通过第一联轴器控制部(180)而使离合器鼓(94L)的转速(Ncl)即汽车传动轴(28)的转速(Np)增大,并在基于汽车传动轴(28)的转速(Np)与后轮(16L)的转速(Nwrl)而判断为传递转矩(T1)与制动转矩(Ts1)已平衡之际,对被存储于I‑T特性存储部(180a)中的I‑T特性(L)进行学习补正,因此能够