
基于双无线网络的移动机器人遍历路径规划方法.pdf

努力****甲寅

1/10
2/10
3/10

4/10

5/10
6/10
7/10

8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于双无线网络的移动机器人遍历路径规划方法.pdf
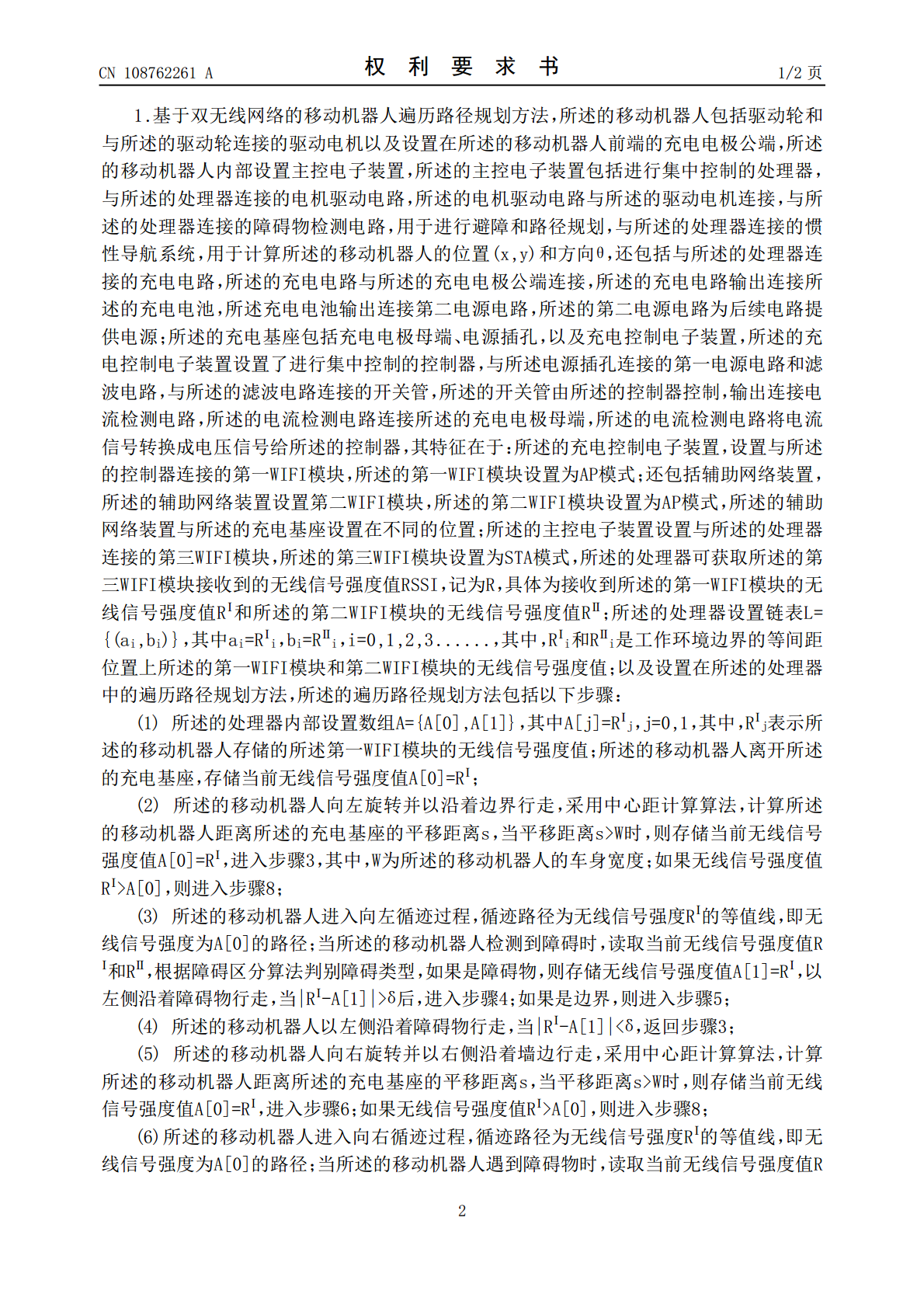
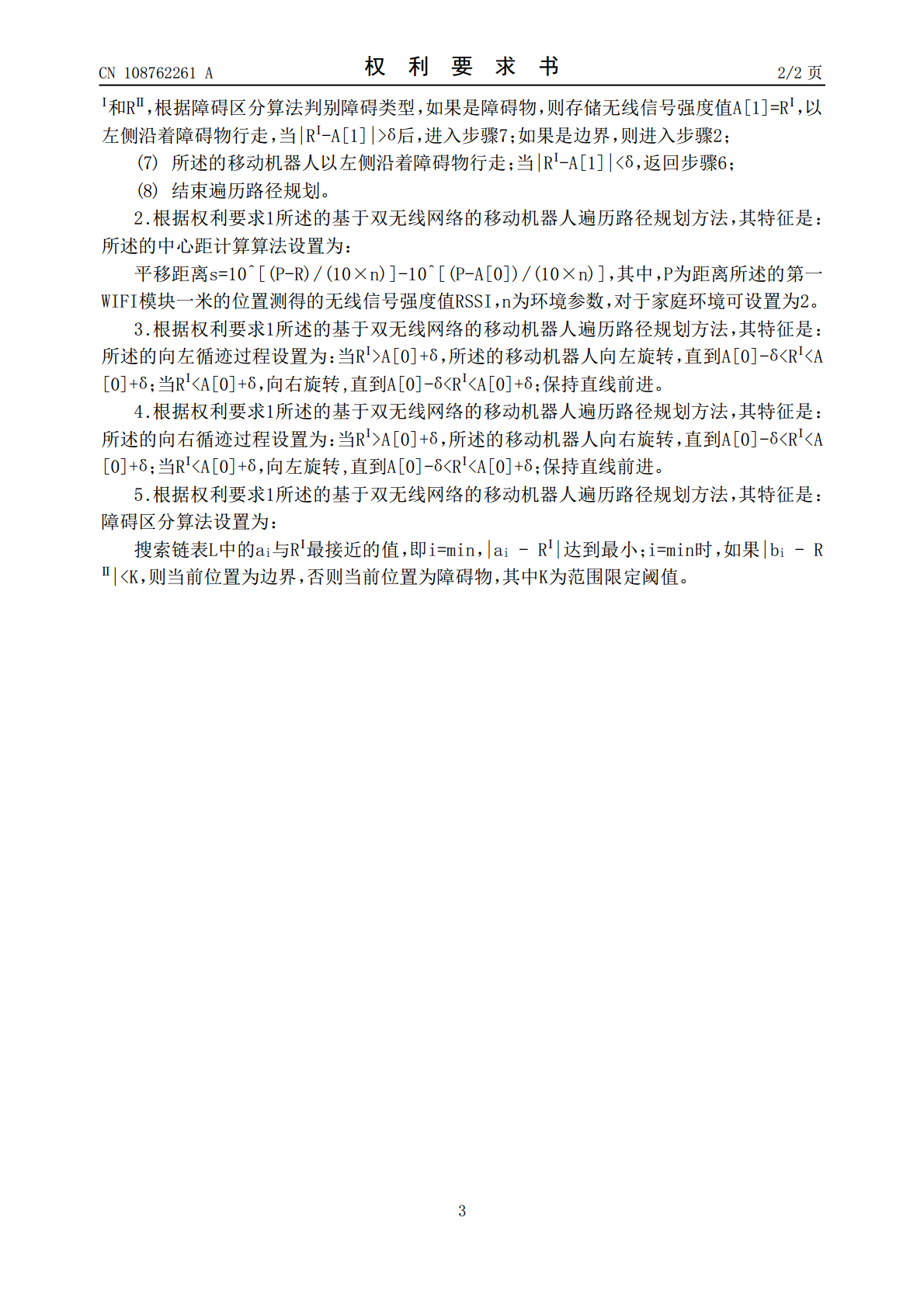
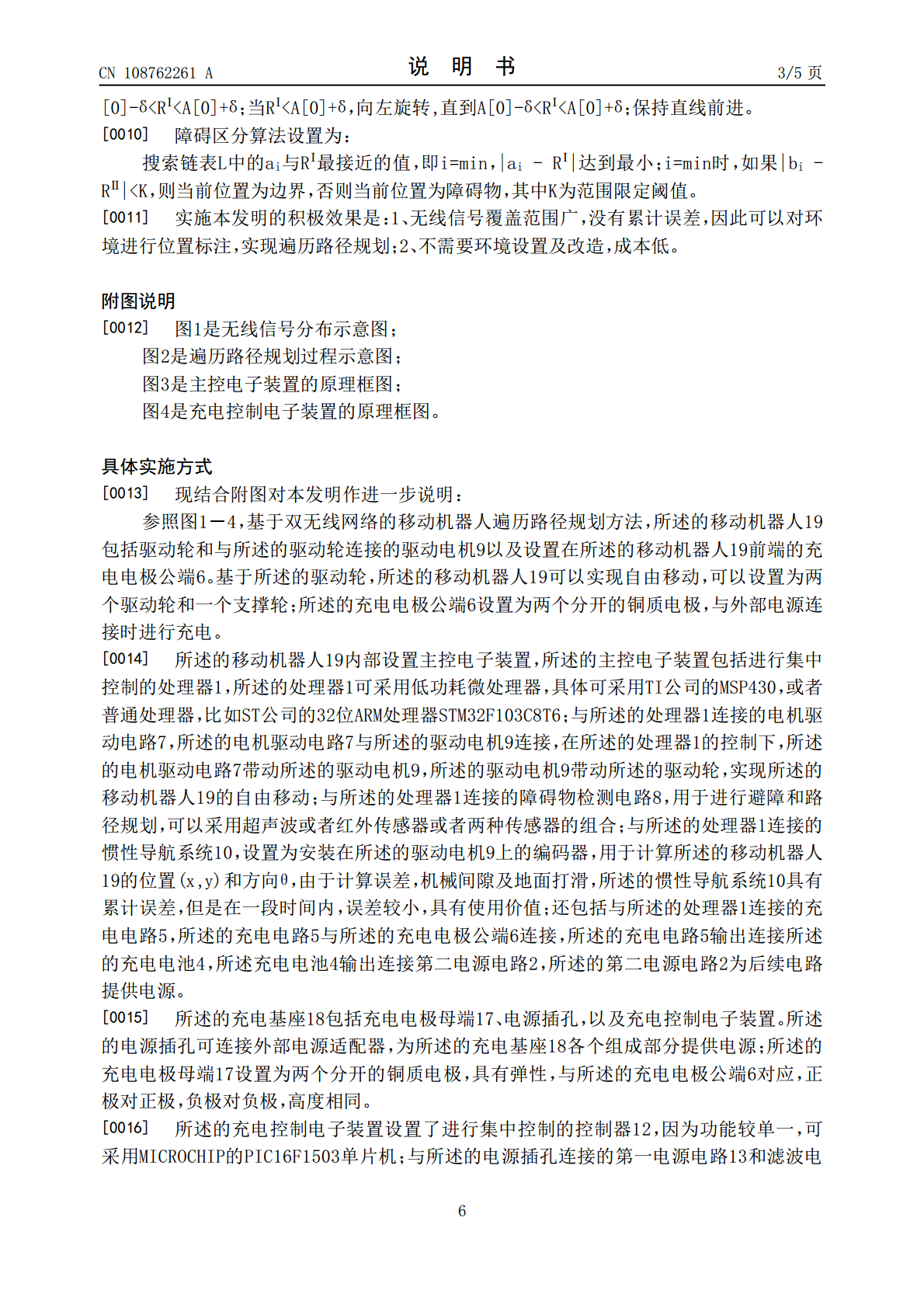
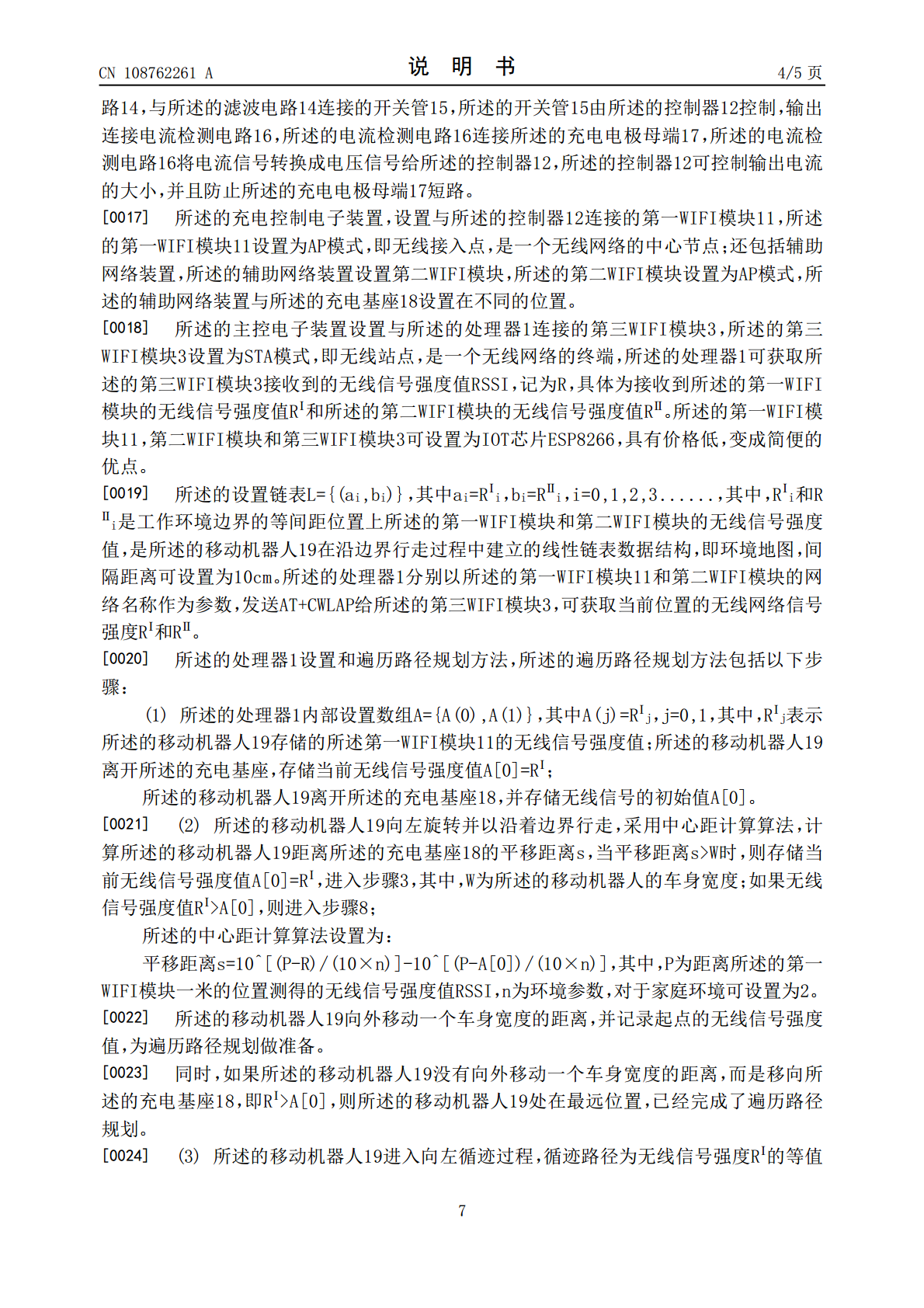
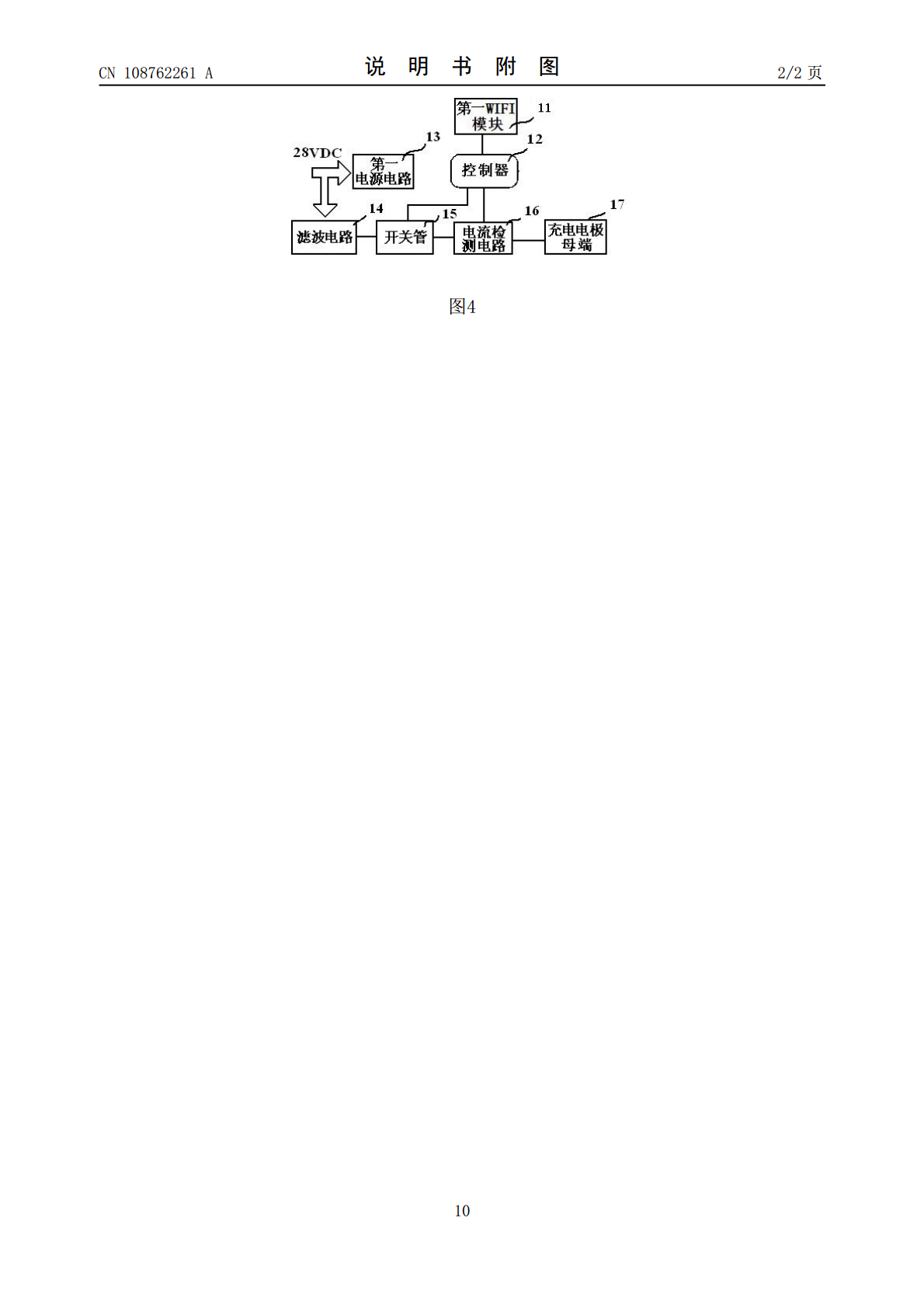
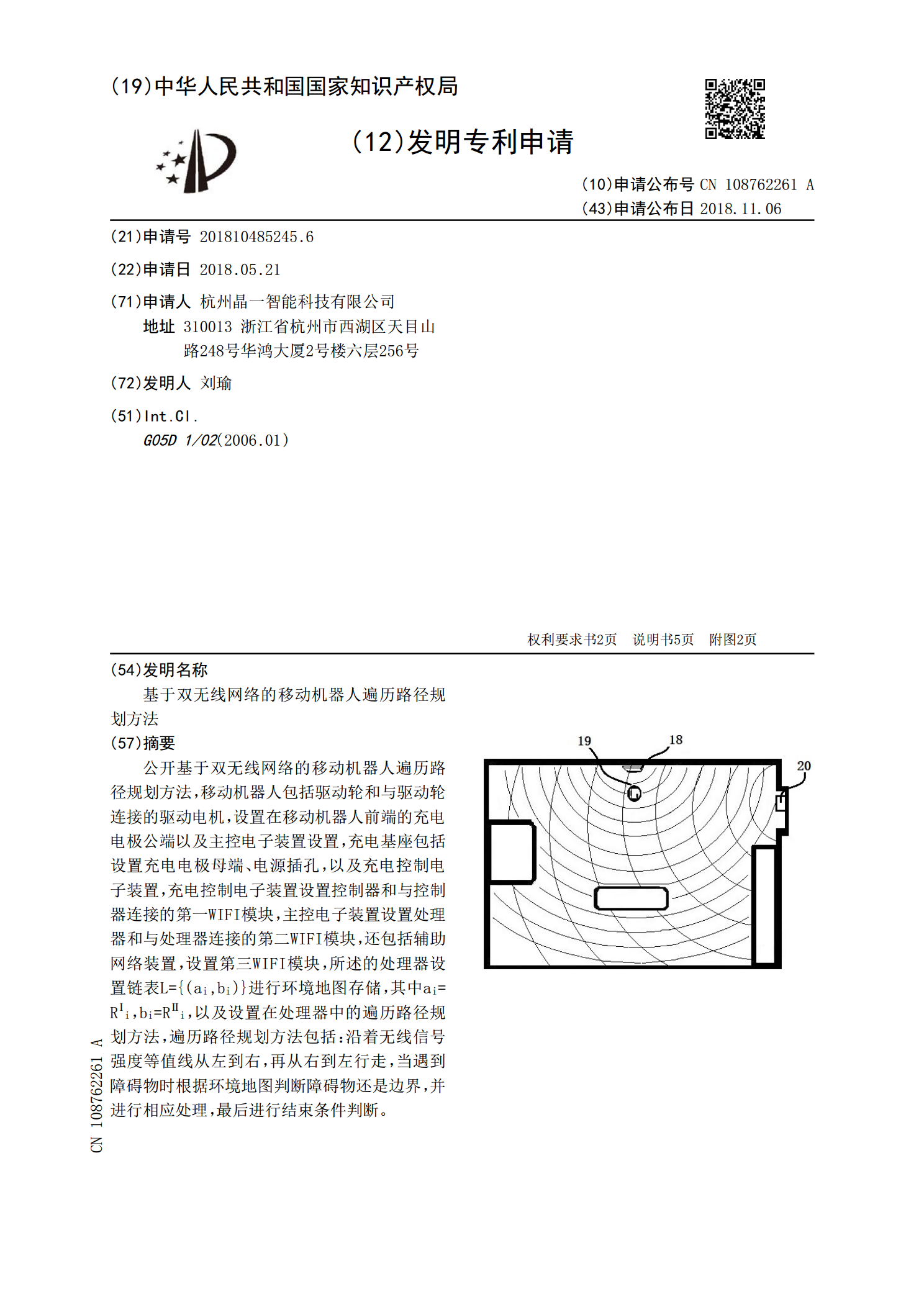
公开基于双无线网络的移动机器人遍历路径规划方法,移动机器人包括驱动轮和与驱动轮连接的驱动电机,设置在移动机器人前端的充电电极公端以及主控电子装置设置,充电基座包括设置充电电极母端、电源插孔,以及充电控制电子装置,充电控制电子装置设置控制器和与控制器连接的第一WIFI模块,主控电子装置设置处理器和与处理器连接的第二WIFI模块,还包括辅助网络装置,设置第三WIFI模块,所述的处理器设置链表L={(a
基于无线网络和地磁信号的室内移动机器人遍历路径规划方法.pdf
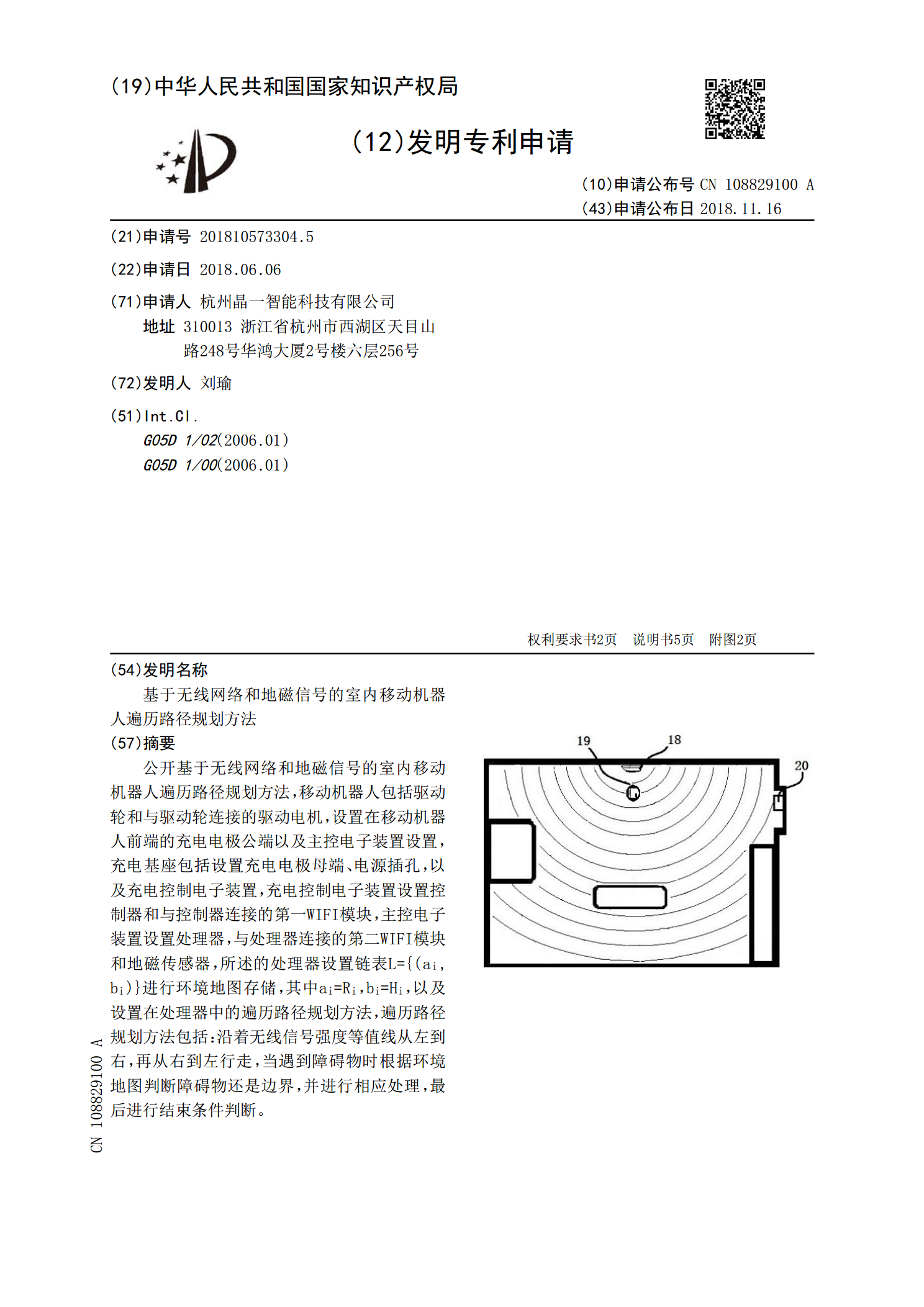
公开基于无线网络和地磁信号的室内移动机器人遍历路径规划方法,移动机器人包括驱动轮和与驱动轮连接的驱动电机,设置在移动机器人前端的充电电极公端以及主控电子装置设置,充电基座包括设置充电电极母端、电源插孔,以及充电控制电子装置,充电控制电子装置设置控制器和与控制器连接的第一WIFI模块,主控电子装置设置处理器,与处理器连接的第二WIFI模块和地磁传感器,所述的处理器设置链表L={(a
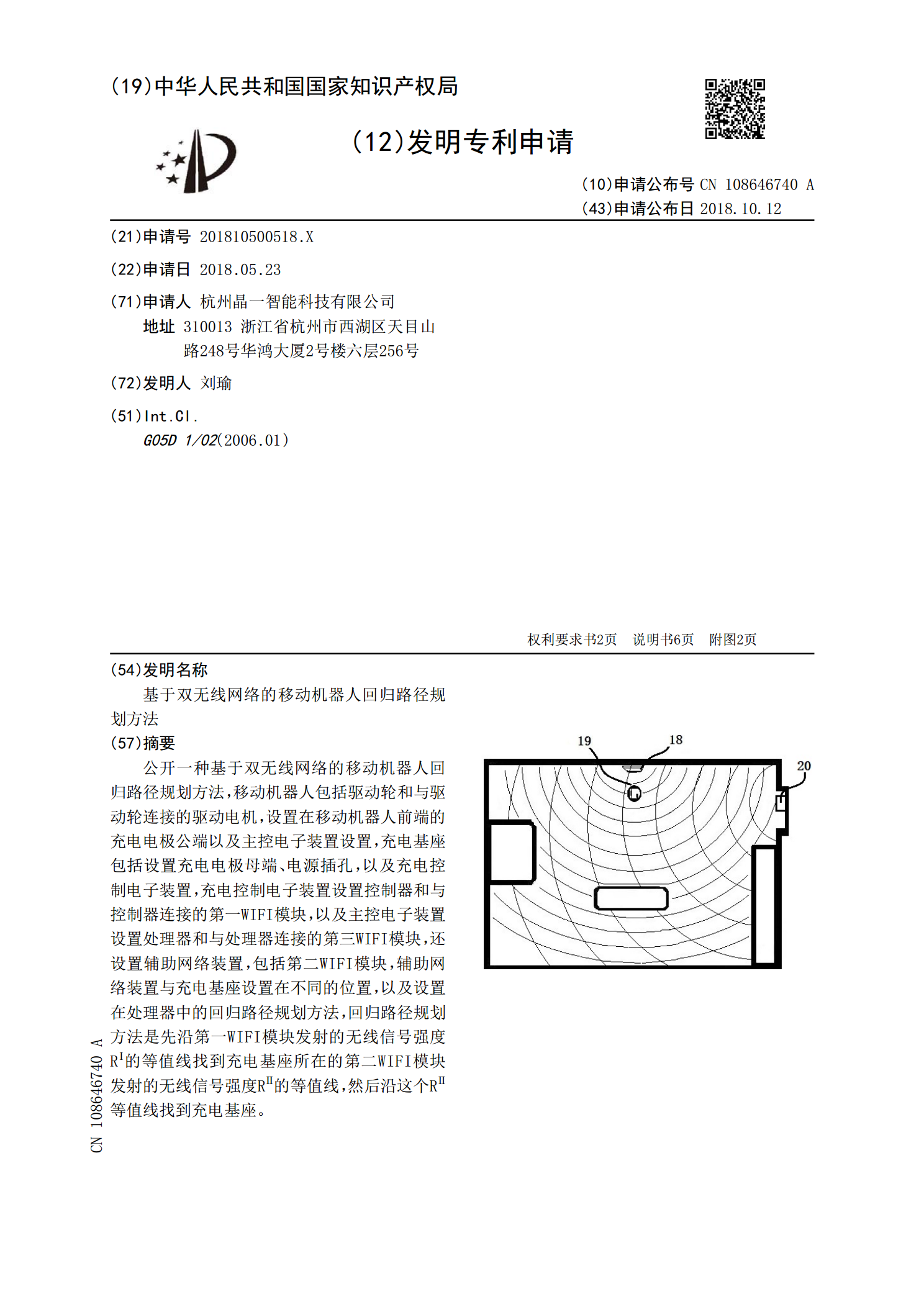
基于双无线网络的移动机器人回归路径规划方法.pdf
公开一种基于双无线网络的移动机器人回归路径规划方法,移动机器人包括驱动轮和与驱动轮连接的驱动电机,设置在移动机器人前端的充电电极公端以及主控电子装置设置,充电基座包括设置充电电极母端、电源插孔,以及充电控制电子装置,充电控制电子装置设置控制器和与控制器连接的第一WIFI模块,以及主控电子装置设置处理器和与处理器连接的第三WIFI模块,还设置辅助网络装置,包括第二WIFI模块,辅助网络装置与充电基座设置在不同的位置,以及设置在处理器中的回归路径规划方法,回归路径规划方法是先沿第一WIFI模块发射的无线信号强
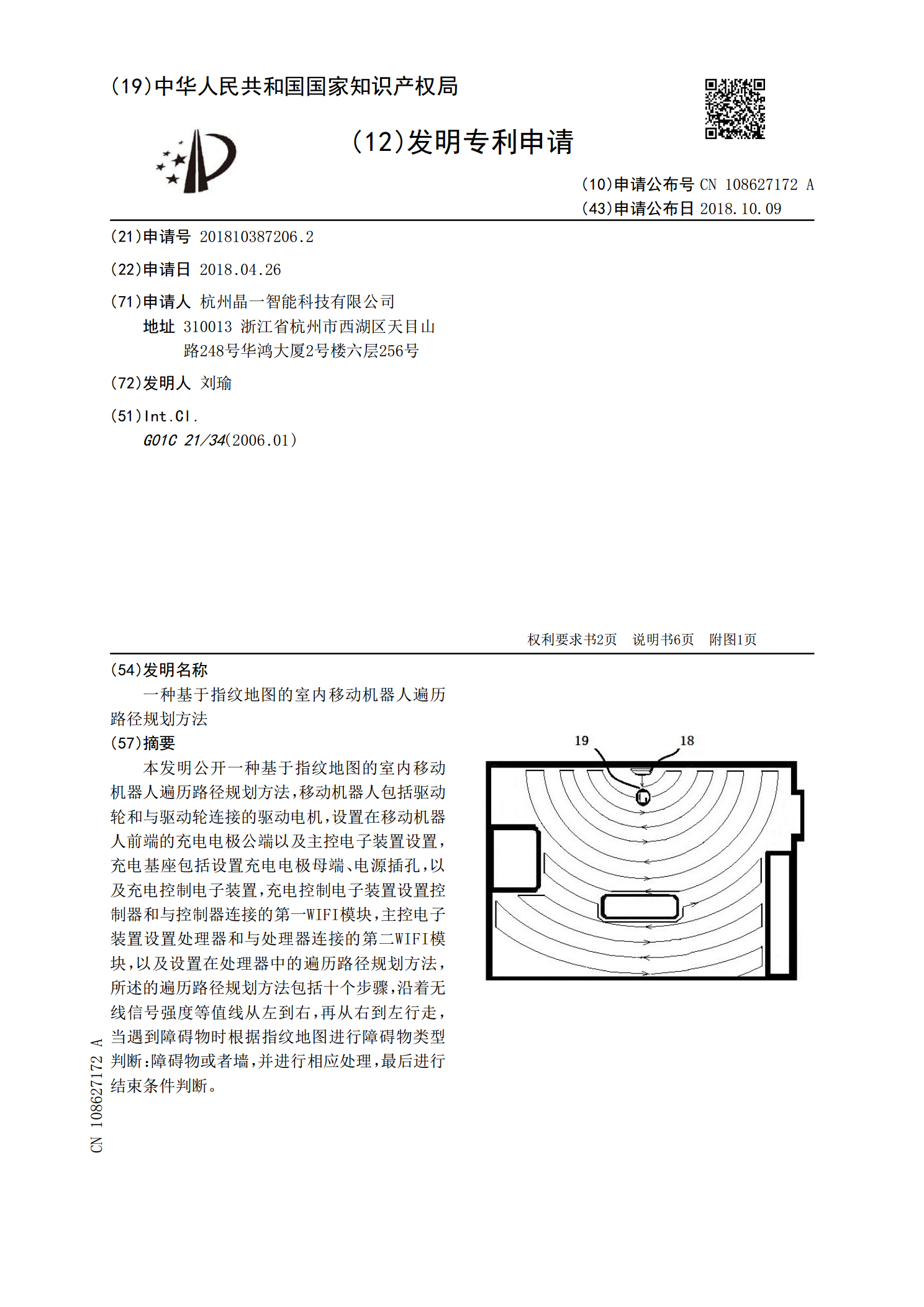
一种基于指纹地图的室内移动机器人遍历路径规划方法.pdf
本发明公开一种基于指纹地图的室内移动机器人遍历路径规划方法,移动机器人包括驱动轮和与驱动轮连接的驱动电机,设置在移动机器人前端的充电电极公端以及主控电子装置设置,充电基座包括设置充电电极母端、电源插孔,以及充电控制电子装置,充电控制电子装置设置控制器和与控制器连接的第一WIFI模块,主控电子装置设置处理器和与处理器连接的第二WIFI模块,以及设置在处理器中的遍历路径规划方法,所述的遍历路径规划方法包括十个步骤,沿着无线信号强度等值线从左到右,再从右到左行走,当遇到障碍物时根据指纹地图进行障碍物类型判断:障
移动机器人完全遍历路径规划算法研究.pdf
东南大学硕士学位论文移动机器人完全遍历路径规划算法研究姓名:胡正聪申请学位级别:硕士专业:机械电子工程指导教师:张赤斌20080403摘要移动机器人完全遍历路径规划算法研究指导老N.-张赤斌副教授(东南大学机械工程学院,南京)研究生:胡正聪何环境中的各个特征分别进行了描述,提出了适用于几何环境地图的未知环境漫游规则和提出几何区域中各区域之间距离的定义。根据漫游得到的区域连通关系矩阵和距离矩阵,随着人工智能、智能控制、仿生学等理论的发展,移动机器人技术的研究受到越来越多的学者重视,移动机器人在生产、生活中也