
一种龙门式多工位机械手动作控制机构.pdf

小凌****甜蜜

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种龙门式多工位机械手动作控制机构.pdf
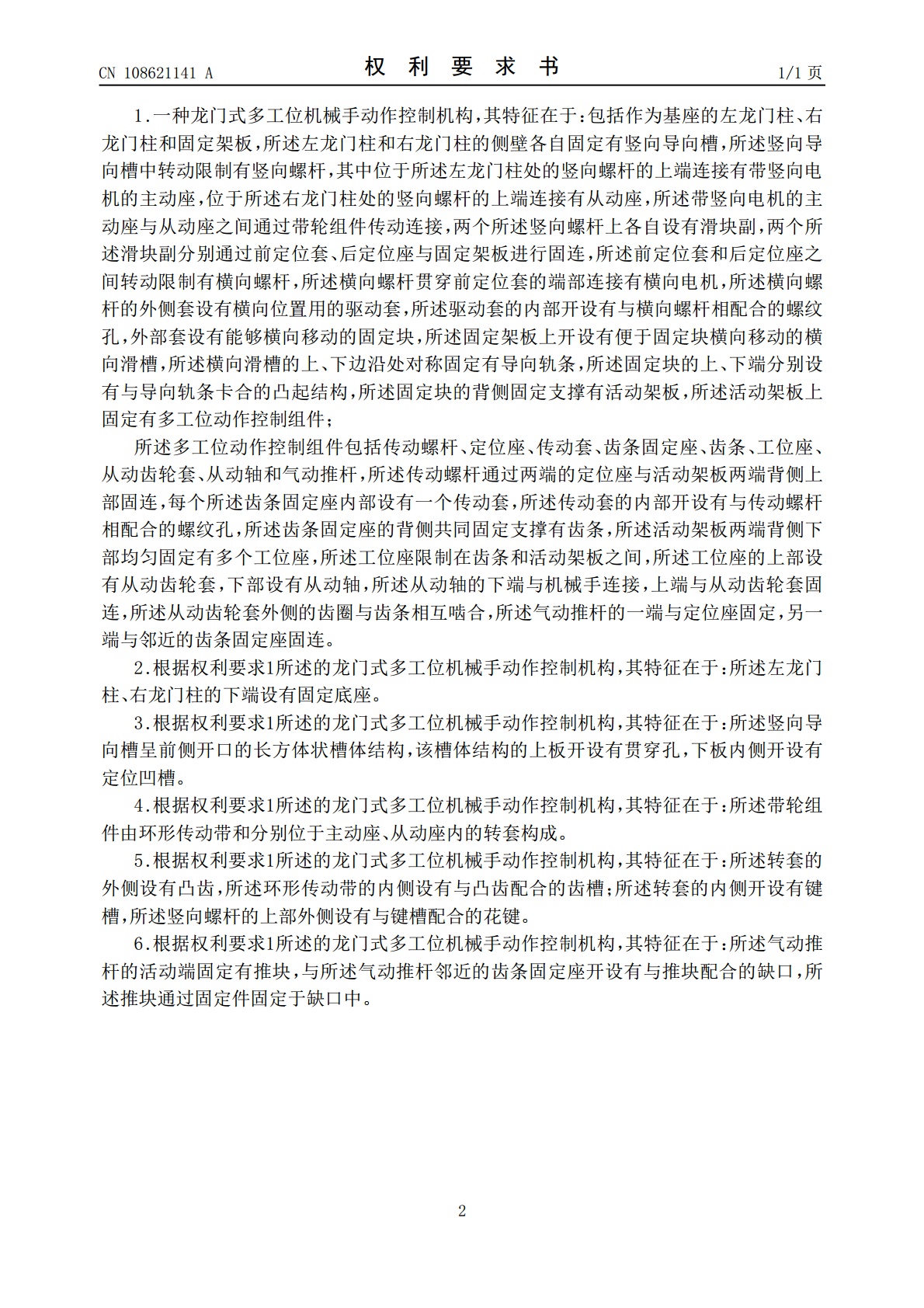
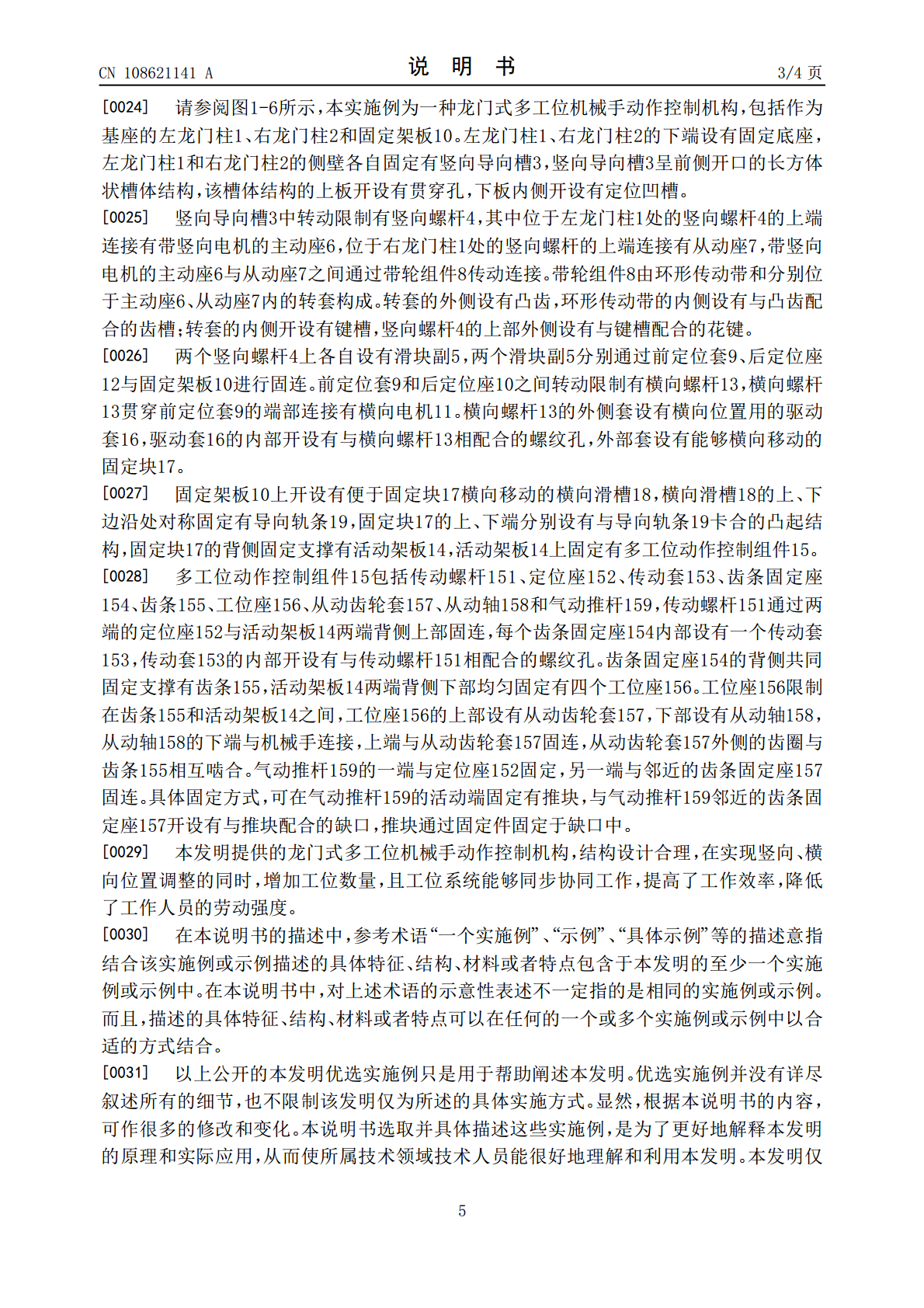
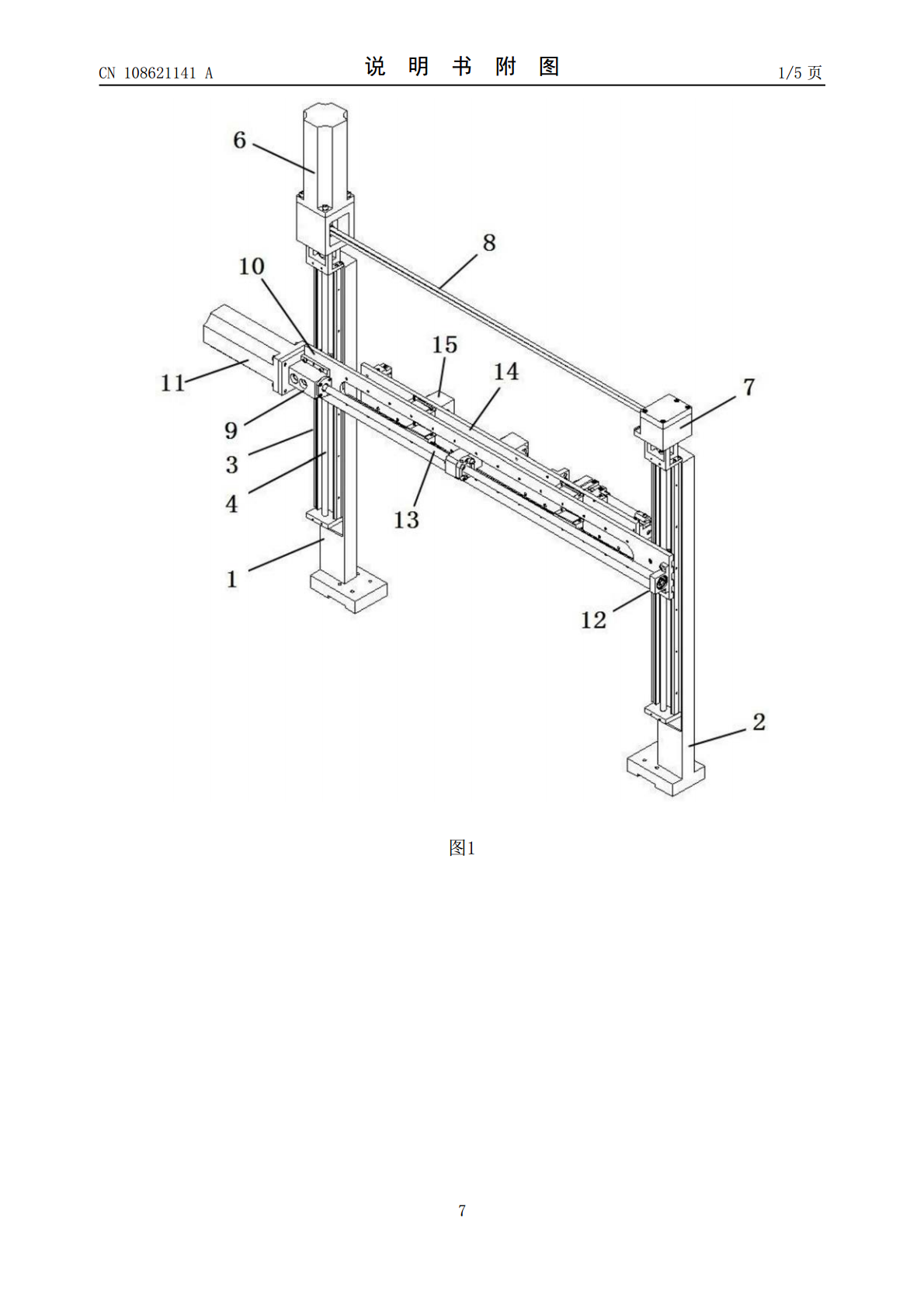
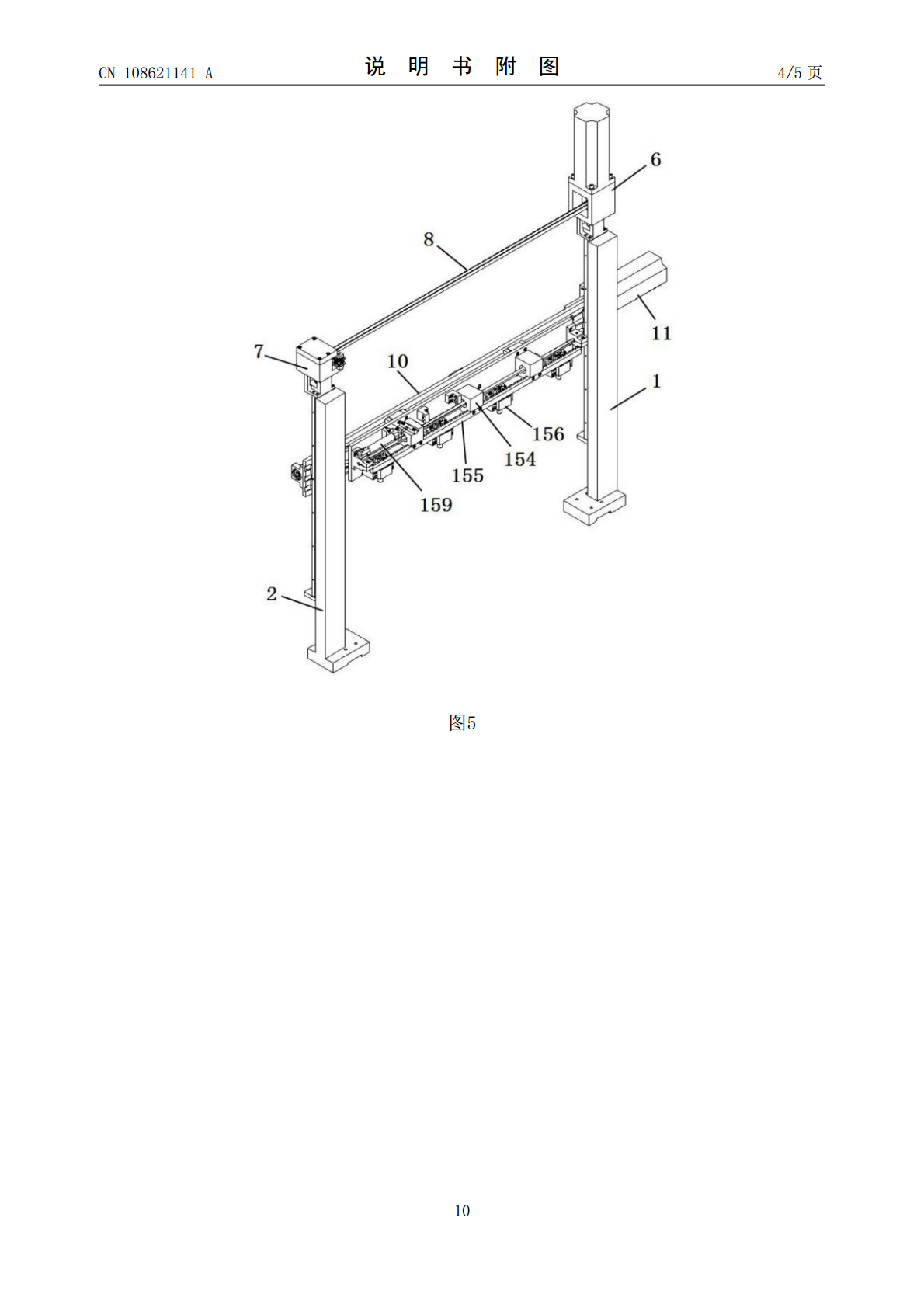
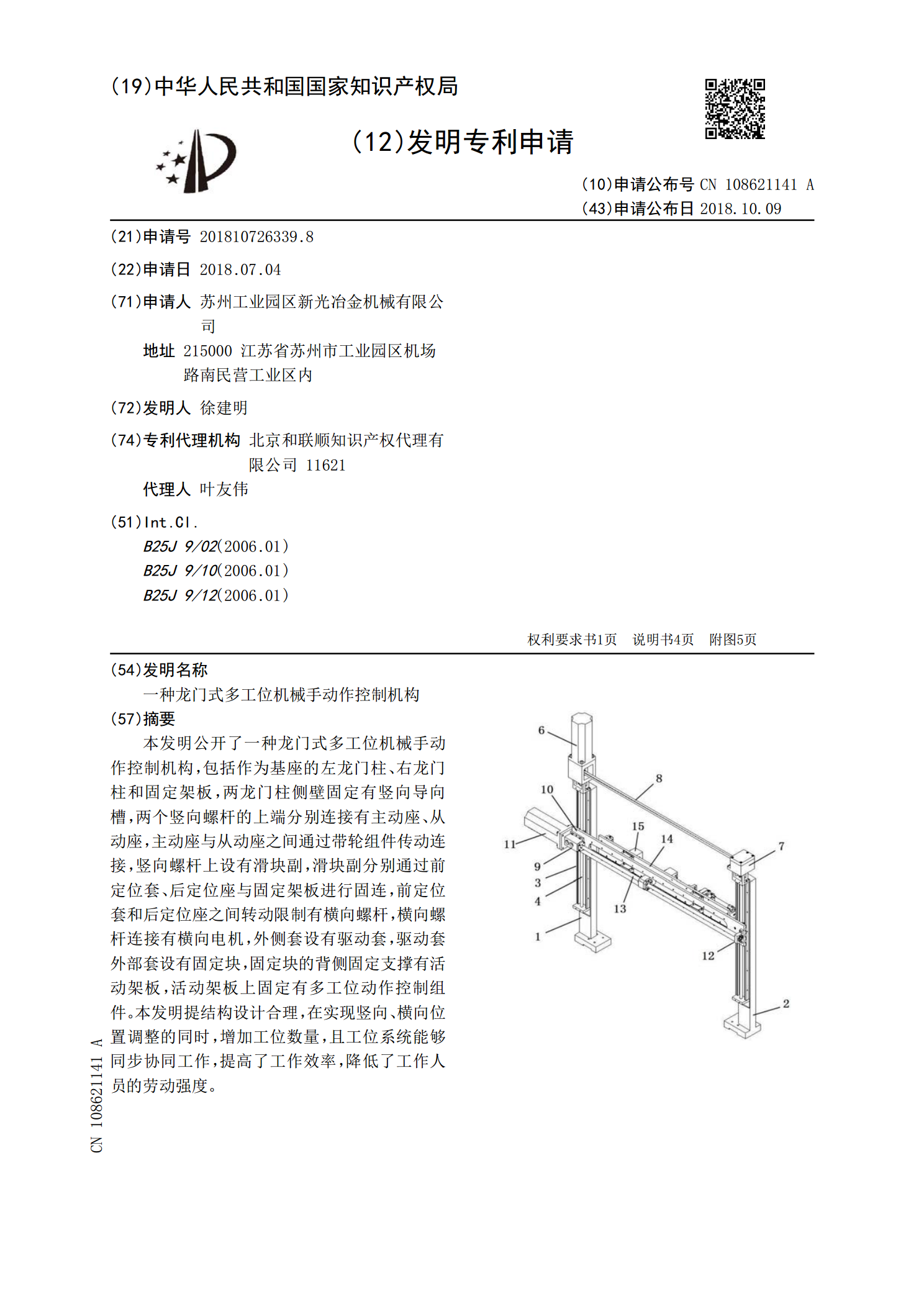
本发明公开了一种龙门式多工位机械手动作控制机构,包括作为基座的左龙门柱、右龙门柱和固定架板,两龙门柱侧壁固定有竖向导向槽,两个竖向螺杆的上端分别连接有主动座、从动座,主动座与从动座之间通过带轮组件传动连接,竖向螺杆上设有滑块副,滑块副分别通过前定位套、后定位座与固定架板进行固连,前定位套和后定位座之间转动限制有横向螺杆,横向螺杆连接有横向电机,外侧套设有驱动套,驱动套外部套设有固定块,固定块的背侧固定支撑有活动架板,活动架板上固定有多工位动作控制组件。本发明提结构设计合理,在实现竖向、横向位置调整的同时,

一种机械式多工位机械手.pdf
本发明涉及一种机械式多工位机械手,包括曲轴和与曲轴垂直的推送轴,曲轴和推送轴之间配合连接相互啮合的斜齿轮对一,机架上还转动连接与推送轴垂直的夹紧驱动轴,推送轴与夹紧驱动轴之间配合连接相互啮合的斜齿轮对二,推送轴上还固定连接推送共轭凸轮,夹紧驱动轴的输出端设有用于夹紧、升降工件的夹紧提升机构,推送共轭凸轮下侧的机架上转动连接推送摆轴,推送摆轴上摆动连接Y形推送杠杆,推送杠杆上端的Y形分叉之间与推送共轭凸轮外缘接触配合连接实现推送共轭凸轮转动时推送杠杆的摆动运动,所述推送杠杆的另一端铰接推送连杆,所述推送连杆

一种翻转式多工位上下料机械手.pdf
一种翻转式多工位上下料机械手,包括料盒、第一翻转机构、第二翻转机构、Z轴驱动机构、Y轴驱动机构、加工台和复数个吸附机构,料盒内设有复数个排序腔,排序腔内竖立排列放置待加工面板和已加工面板,待加工面板与已加工面板之间留有取料空间,加工台沿面板排列方向设于料盒的后方,Y轴驱动机构沿面板排列方向设于料盒的一侧,Y轴驱动机构与Z轴驱动机构连接,Z轴驱动机构与第一翻转机构连接,第一翻转机构悬空于料盒的上方,第二翻转机构设于第一翻转机构上,吸附机构与第二翻转机构连接。本发明结构合理,能实现多工位上下料,精度高、加工效
一种龙门式多工位榫卯加工中心及其加工方法.pdf
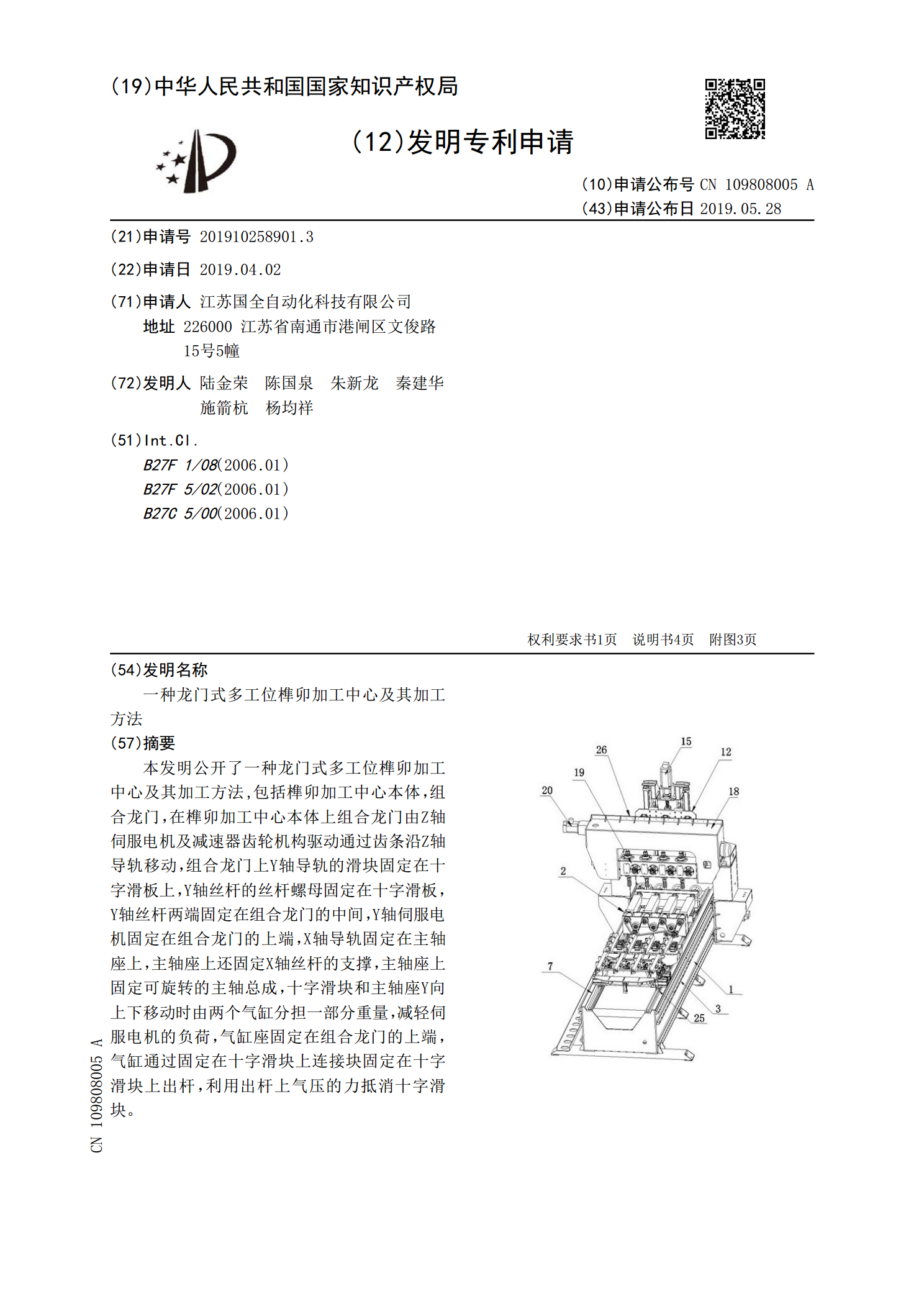
本发明公开了一种龙门式多工位榫卯加工中心及其加工方法,包括榫卯加工中心本体,组合龙门,在榫卯加工中心本体上组合龙门由Z轴伺服电机及减速器齿轮机构驱动通过齿条沿Z轴导轨移动,组合龙门上Y轴导轨的滑块固定在十字滑板上,Y轴丝杆的丝杆螺母固定在十字滑板,Y轴丝杆两端固定在组合龙门的中间,Y轴伺服电机固定在组合龙门的上端,X轴导轨固定在主轴座上,主轴座上还固定X轴丝杆的支撑,主轴座上固定可旋转的主轴总成,十字滑块和主轴座Y向上下移动时由两个气缸分担一部分重量,减轻伺服电机的负荷,气缸座固定在组合龙门的上端,气缸通
一种旋转式多工位夹糖机构.pdf
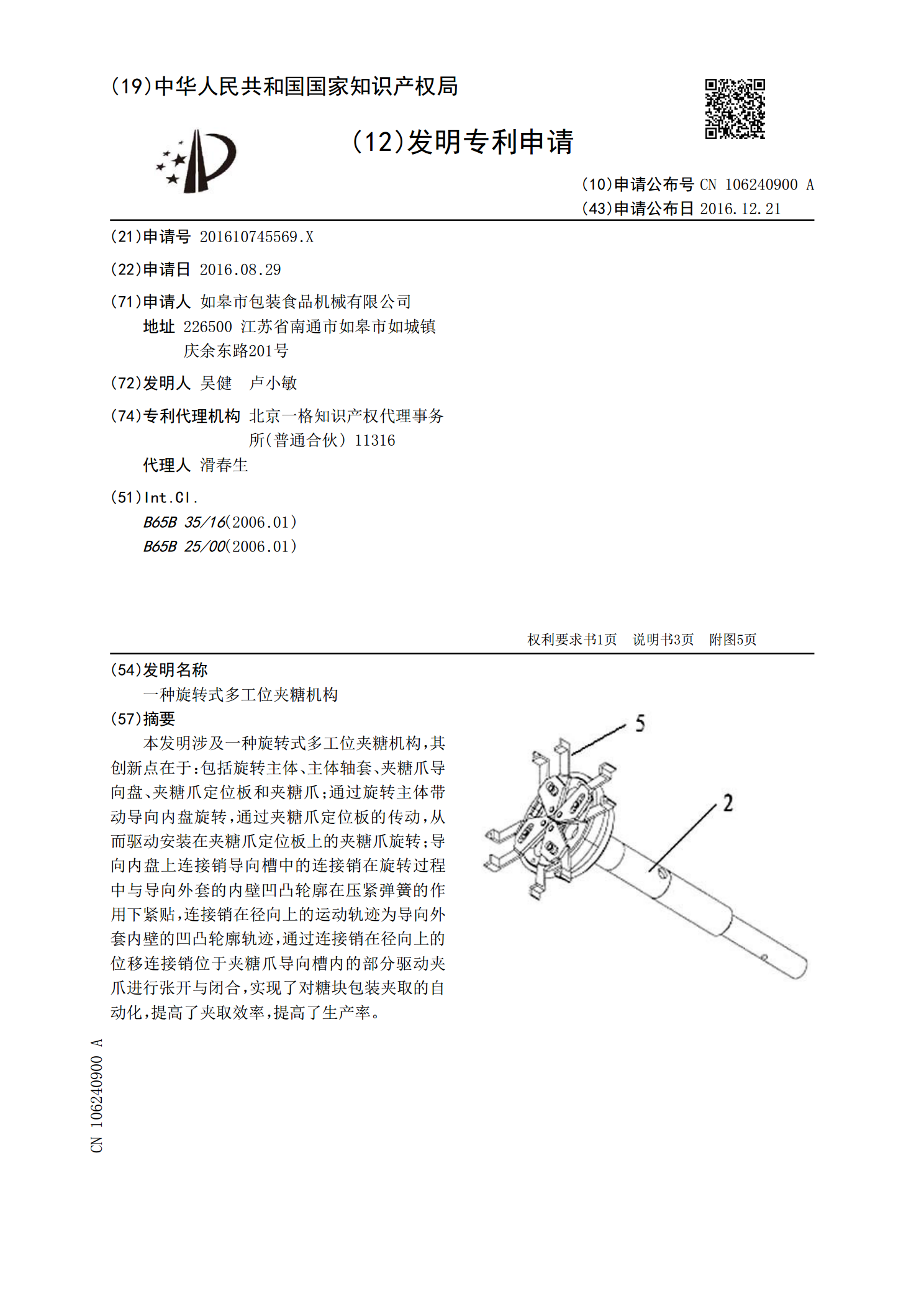
本发明涉及一种旋转式多工位夹糖机构,其创新点在于:包括旋转主体、主体轴套、夹糖爪导向盘、夹糖爪定位板和夹糖爪;通过旋转主体带动导向内盘旋转,通过夹糖爪定位板的传动,从而驱动安装在夹糖爪定位板上的夹糖爪旋转;导向内盘上连接销导向槽中的连接销在旋转过程中与导向外套的内壁凹凸轮廓在压紧弹簧的作用下紧贴,连接销在径向上的运动轨迹为导向外套内壁的凹凸轮廓轨迹,通过连接销在径向上的位移连接销位于夹糖爪导向槽内的部分驱动夹爪进行张开与闭合,实现了对糖块包装夹取的自动化,提高了夹取效率,提高了生产率。