
基于双目立体视觉的战车三维重建系统设计与实现的任务书.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于双目立体视觉的战车三维重建系统设计与实现的任务书.docx
基于双目立体视觉的战车三维重建系统设计与实现的任务书一、任务目的双目立体视觉是一种广泛应用于图像处理、机器视觉等领域的技术,利用两个摄像头同时捕捉同一场景,通过计算两个图像之间的差异,得出物体的深度信息,从而实现三维重建。本项目旨在利用双目立体视觉技术设计和实现一款战车三维重建系统,以满足军事装备管理、仿真等方面的需求。二、任务内容1.系统分析与设计(1)分析系统的需求,制定系统设计方案。(2)确定系统所需硬件设备及其数量,并分配每个设备的功能。(3)设计系统软件,嵌入算法模块,实现战车的双目图像采集、匹

基于双目立体视觉的三维重建的任务书.docx
基于双目立体视觉的三维重建的任务书任务名称:基于双目立体视觉的三维重建任务概述:本任务旨在设计和开发一种基于双目立体视觉的三维重建系统,实现从双目图像到三维场景的转换,用于物体形状、尺寸、空间姿态等三维信息的获取和应用。任务包括硬件设计与构建、图像预处理、双目匹配、视差计算、三维重建等多个模块。任务具体要求:1.硬件设计与构建:设计硬件系统,包括双目摄像头、计算机等,并进行硬件构建和测试。2.图像预处理:对双目图像进行预处理,包括去噪、增强、色彩校正、畸变矫正等处理。3.双目匹配:对左右两个图像进行匹配,

基于改进SURF的双目立体视觉三维重建的任务书.docx
基于改进SURF的双目立体视觉三维重建的任务书任务书任务名称:基于改进SURF的双目立体视觉三维重建任务背景:随着机器视觉技术的不断发展和应用领域的不断拓展,双目立体视觉三维重建成为了非常热门的研究领域之一。目前,双目立体视觉三维重建技术已经广泛应用于机器人导航、医学影像分析、文物保护等领域。其中,关键技术之一就是特征点匹配。在双目立体视觉三维重建中,对于左右两幅图像之间的特征点匹配是整个流程中最核心的环节之一。传统的特征点匹配算法基本上都是选择SIFT或者SURF算法,并对其进行改进来适应不同环境的需求
一种基于双目立体视觉三维重建系统.pdf
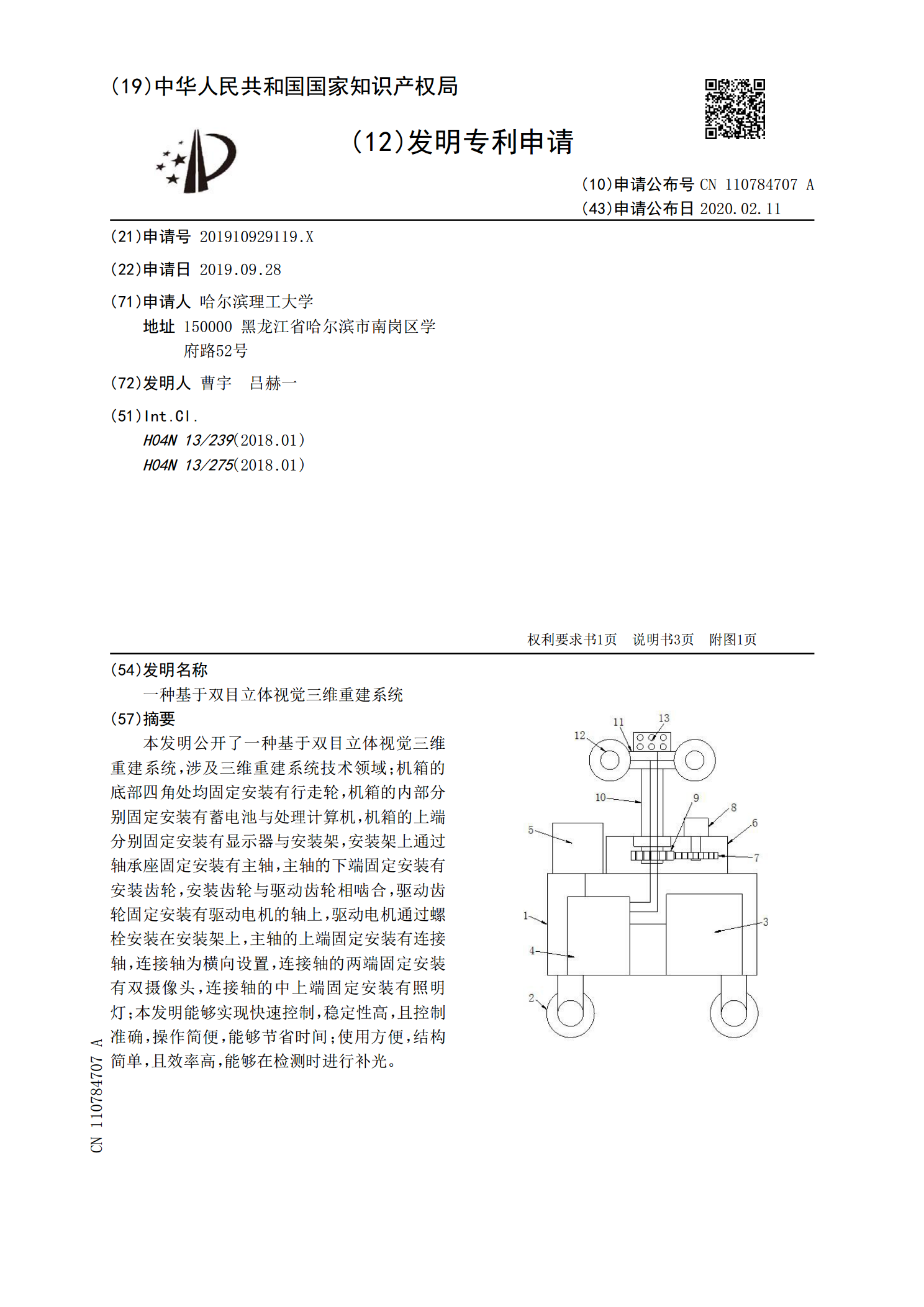
本发明公开了一种基于双目立体视觉三维重建系统,涉及三维重建系统技术领域;机箱的底部四角处均固定安装有行走轮,机箱的内部分别固定安装有蓄电池与处理计算机,机箱的上端分别固定安装有显示器与安装架,安装架上通过轴承座固定安装有主轴,主轴的下端固定安装有安装齿轮,安装齿轮与驱动齿轮相啮合,驱动齿轮固定安装有驱动电机的轴上,驱动电机通过螺栓安装在安装架上,主轴的上端固定安装有连接轴,连接轴为横向设置,连接轴的两端固定安装有双摄像头,连接轴的中上端固定安装有照明灯;本发明能够实现快速控制,稳定性高,且控制准确,操作简

基于双目立体视觉的三维重建系统关键技术研究的任务书.docx
基于双目立体视觉的三维重建系统关键技术研究的任务书任务背景:随着信息技术的飞速发展,三维重建技术的应用越来越广泛。其中,基于双目立体视觉的三维重建技术因其易于实现和高精度的特点,被广泛应用于机器人、VR/AR、医学影像等领域。本任务旨在研究基于双目立体视觉的三维重建系统关键技术,包括图像预处理、视差计算、三维重建、结果优化等方面的技术研究。任务目标:1.掌握基于双目立体视觉的三维重建系统的基本原理和流程。2.研究基于双目立体视觉的图像预处理算法,提高图像的质量和可靠性。3.研究基于双目立体视觉的视差计算方