
无人驾驶车辆场端控制系统及其控制方法.pdf

书生****专家

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
无人驾驶车辆场端控制系统及其控制方法.pdf
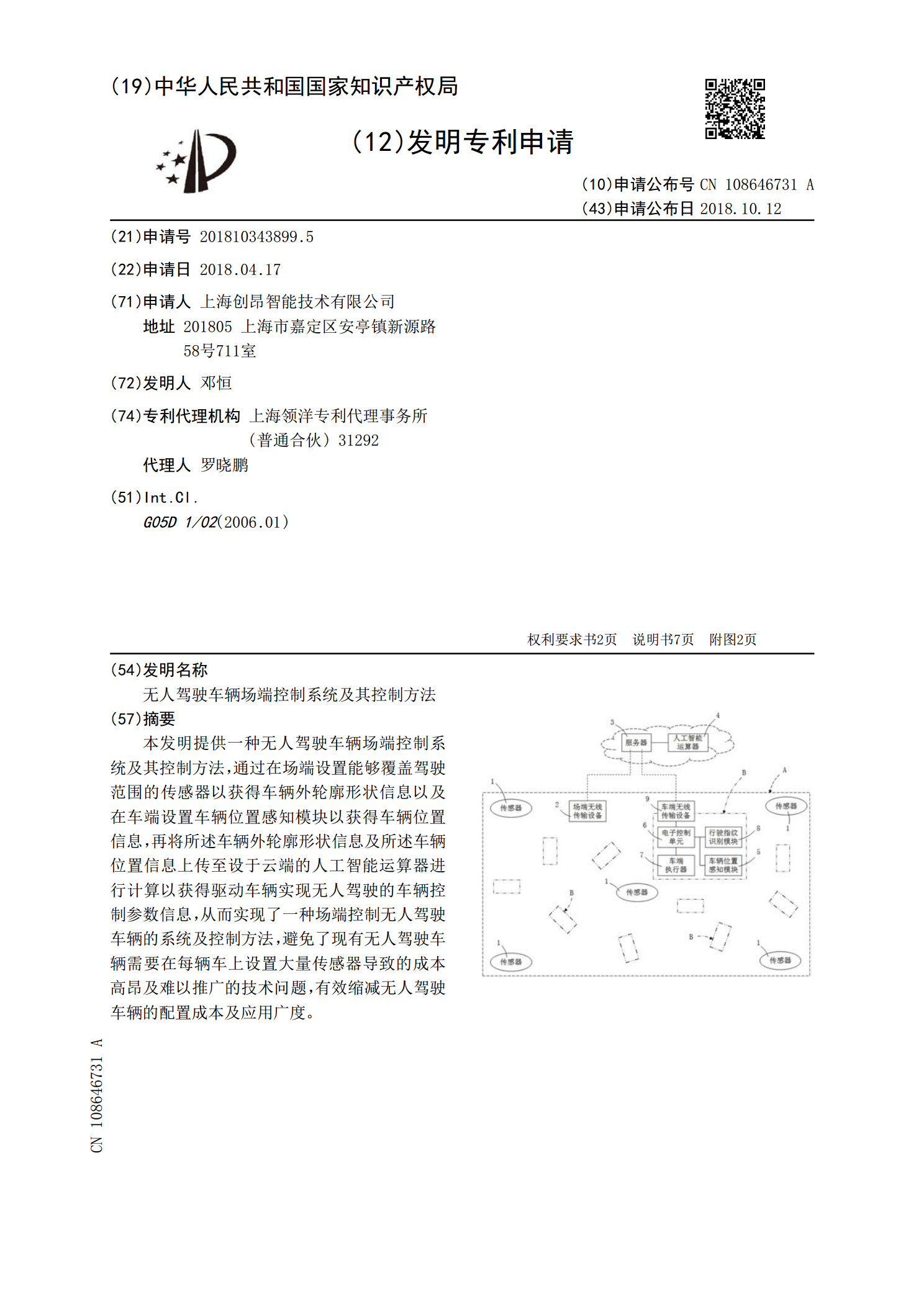
本发明提供一种无人驾驶车辆场端控制系统及其控制方法,通过在场端设置能够覆盖驾驶范围的传感器以获得车辆外轮廓形状信息以及在车端设置车辆位置感知模块以获得车辆位置信息,再将所述车辆外轮廓形状信息及所述车辆位置信息上传至设于云端的人工智能运算器进行计算以获得驱动车辆实现无人驾驶的车辆控制参数信息,从而实现了一种场端控制无人驾驶车辆的系统及控制方法,避免了现有无人驾驶车辆需要在每辆车上设置大量传感器导致的成本高昂及难以推广的技术问题,有效缩减无人驾驶车辆的配置成本及应用广度。
无人驾驶车辆制动控制方法、控制系统及车辆.pdf
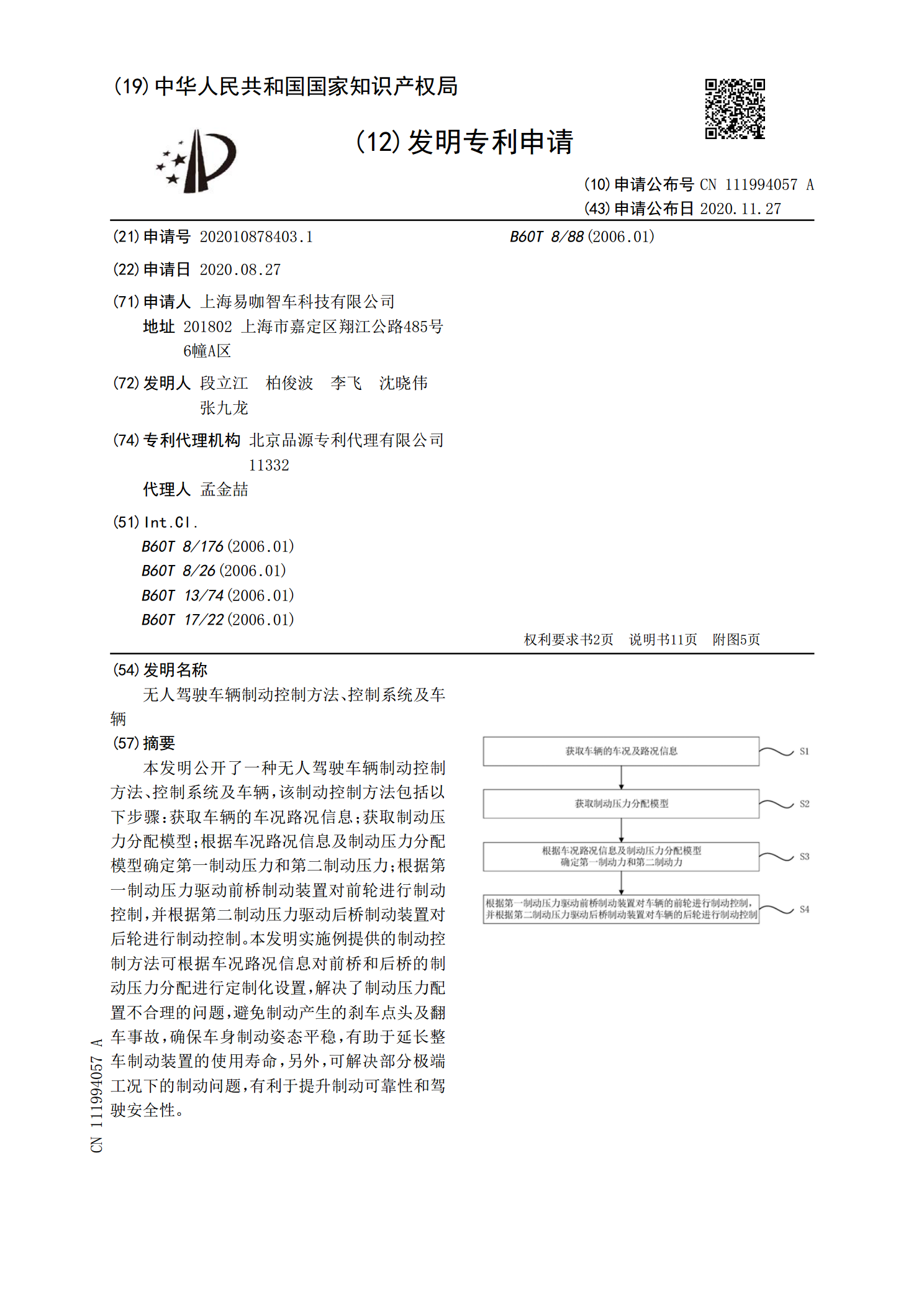
本发明公开了一种无人驾驶车辆制动控制方法、控制系统及车辆,该制动控制方法包括以下步骤:获取车辆的车况路况信息;获取制动压力分配模型;根据车况路况信息及制动压力分配模型确定第一制动压力和第二制动压力;根据第一制动压力驱动前桥制动装置对前轮进行制动控制,并根据第二制动压力驱动后桥制动装置对后轮进行制动控制。本发明实施例提供的制动控制方法可根据车况路况信息对前桥和后桥的制动压力分配进行定制化设置,解决了制动压力配置不合理的问题,避免制动产生的刹车点头及翻车事故,确保车身制动姿态平稳,有助于延长整车制动装置的使用
封闭园区无人驾驶车辆控制系统及方法.pdf
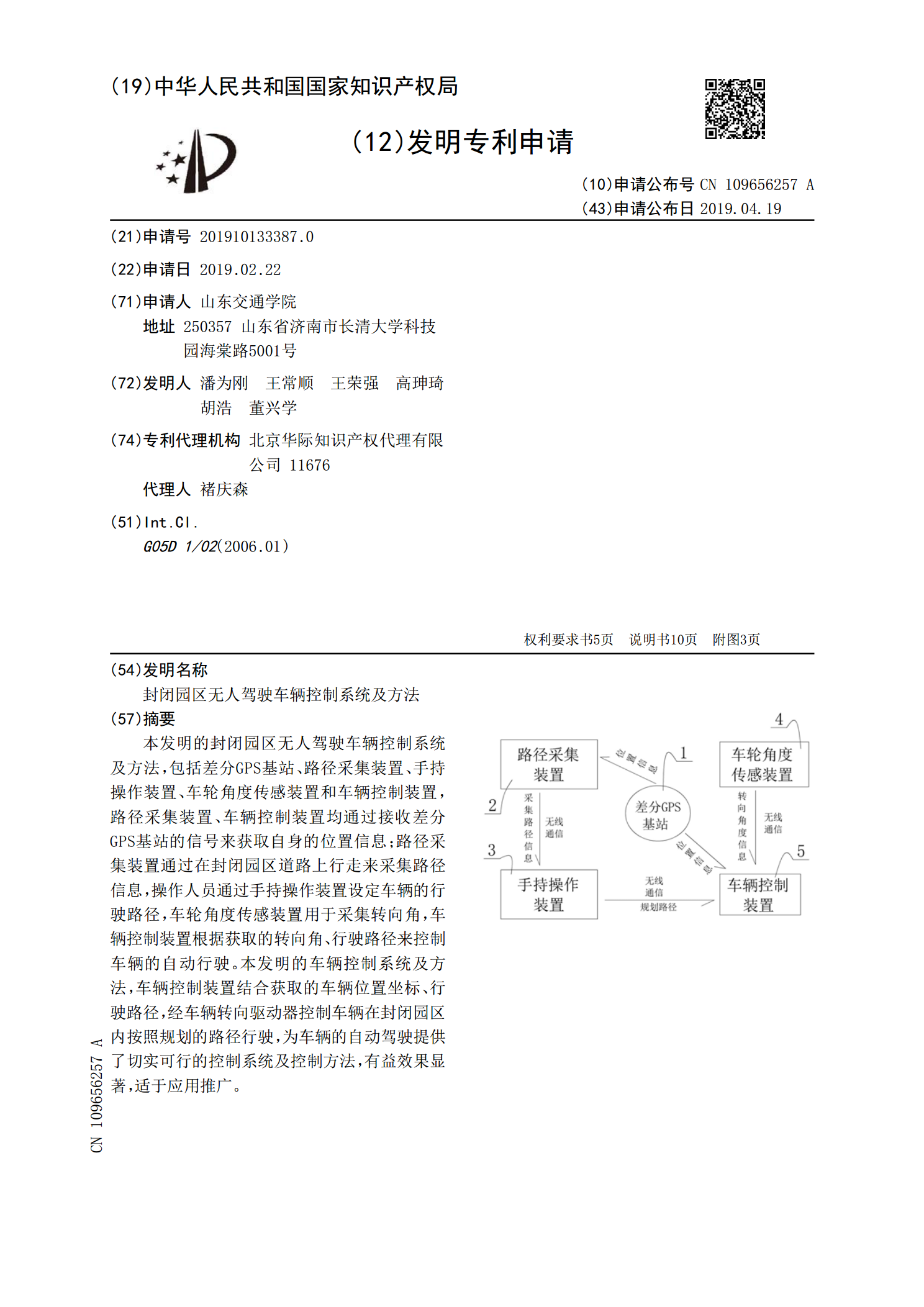
本发明的封闭园区无人驾驶车辆控制系统及方法,包括差分GPS基站、路径采集装置、手持操作装置、车轮角度传感装置和车辆控制装置,路径采集装置、车辆控制装置均通过接收差分GPS基站的信号来获取自身的位置信息;路径采集装置通过在封闭园区道路上行走来采集路径信息,操作人员通过手持操作装置设定车辆的行驶路径,车轮角度传感装置用于采集转向角,车辆控制装置根据获取的转向角、行驶路径来控制车辆的自动行驶。本发明的车辆控制系统及方法,车辆控制装置结合获取的车辆位置坐标、行驶路径,经车辆转向驱动器控制车辆在封闭园区内按照规划的

无人驾驶车辆转向系统及其控制方法.pdf
本发明公开了一种无人驾驶车辆转向系统及其方法,包括执行电机、方向机、电机编码器、非接触式零位检测机构、非接触式左限位检测机构、非接触式右限位检测机构、前轮绝对转角机构、前轮转角双闭环控制系统,执行电机为转向驱动机构,执行电机的输入端与方向机的输出端相连;电机编码器连接在执行电机后端输出轴上。本发明有利于提高无人驾驶车辆的转向控制精确度,并采用切换开关切换人为驾驶/自主驾驶控制过程,方便程序调试及保证紧急情况下的车辆和人员身体安全。
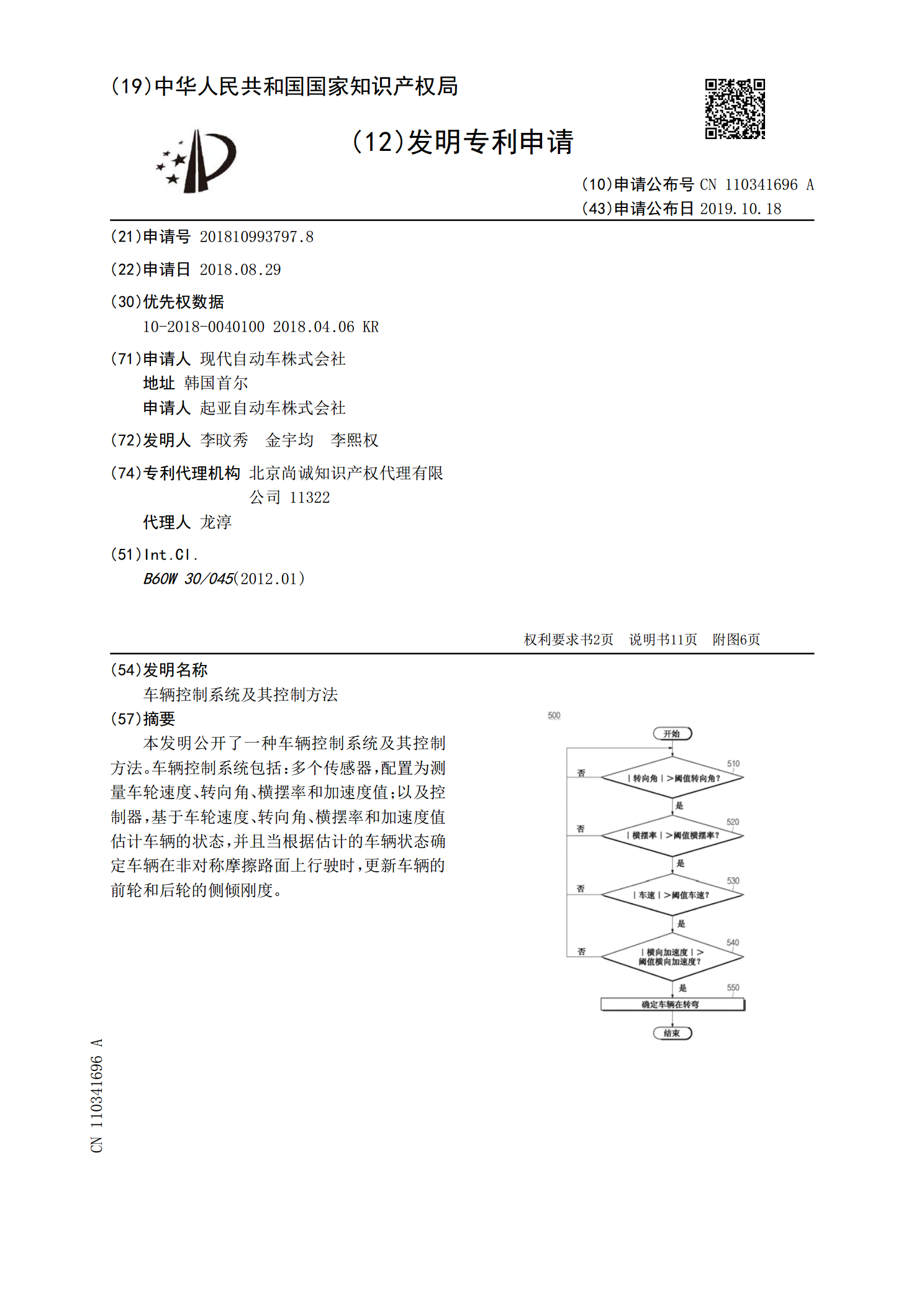
车辆控制系统及其控制方法.pdf
本发明公开了一种车辆控制系统及其控制方法。车辆控制系统包括:多个传感器,配置为测量车轮速度、转向角、横摆率和加速度值;以及控制器,基于车轮速度、转向角、横摆率和加速度值估计车辆的状态,并且当根据估计的车辆状态确定车辆在非对称摩擦路面上行驶时,更新车辆的前轮和后轮的侧倾刚度。